

2.2. Проектирование фильтров эквалайзера
Интервал
частот (у каждого он задан вариантом)
следует разбить на промежутки, содержащие
равное количество октав. Эти промежутки
называются полосами. Каждая полоса
имеет 2 характеристики: центральную
частоту![]() и ширину
и ширину![]() ,
где
,
где![]() и
и
![]() –
нижняя и верхняя граничные частоты
соответственно. Ширину полосы
переходаследует принять около 10% от
граничной частоты.
–
нижняя и верхняя граничные частоты
соответственно. Ширину полосы
переходаследует принять около 10% от
граничной частоты.
При расчетах следует выбрать частоту дискретизации фильтров в соответствии с законами обработки дискретных сигналов. Она будет зависеть от частоты дискретизации входного звукового файла.
Поскольку наше ухо физически не может услышать колебания частотой меньше 20 Гц и больше 20 кГц, первый и последний фильтры можно сделать «ступенчатыми» (ФНЧ и ФВЧ соответственно). Это целесообразно, так как физически реализовать «ступенчатые» фильтры проще полосовых.
С использованием инструмента fdatoolспроектируем фильтры минимального порядка, удовлетворяющие описанным выше требованиям. На рис. 2 показан пример использования fdatool для расчета первого фильтра минимального порядка. На панели CurrentFilterInformationотображена общая информация о спроектированном фильтре. Минимальный порядок для первого фильтра равен 18, такой фильтр можно реализовать последовательным или параллельным соединением 9 секций второго порядка. Результаты расчета минимального порядка остальных фильтров представлены в табл.1.
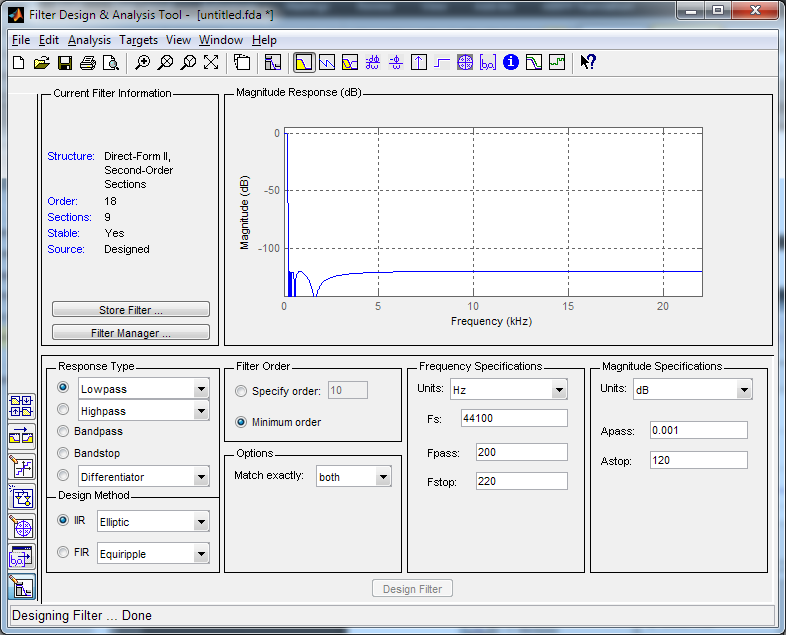
Рис. 2. Расчет фильтра нижних частот минимального порядка.
Таблица 1. Минимальный порядок фильтров.
Фильтр |
Порядок фильтра |
Фильтр 1. |
18 |
Фильтр 2. |
30 |
Фильтр 3. |
34 |
Фильтр 4. |
30 |
Фильтр 5. |
15 |
Поскольку во время работы каждое звено фильтра вносит некоторую вычислительную задержку, то для синхронной работы эквалайзера будем использовать фильтры одинакового порядка. Для того чтобы все фильтры удовлетворяли поставленным требованиям, необходимо использовать фильтры не меньше 34 порядка. Результаты проектирования требуемых фильтров, включая АЧХ каждого фильтра, представлены на рис. 3 – рис. 7.
3. Моделирование эквалайзера в Simulink
3.1. Описание модели
Схема моделирования 5-ти полосного эквалайзера в среде Simulink представлена на рис. 8.
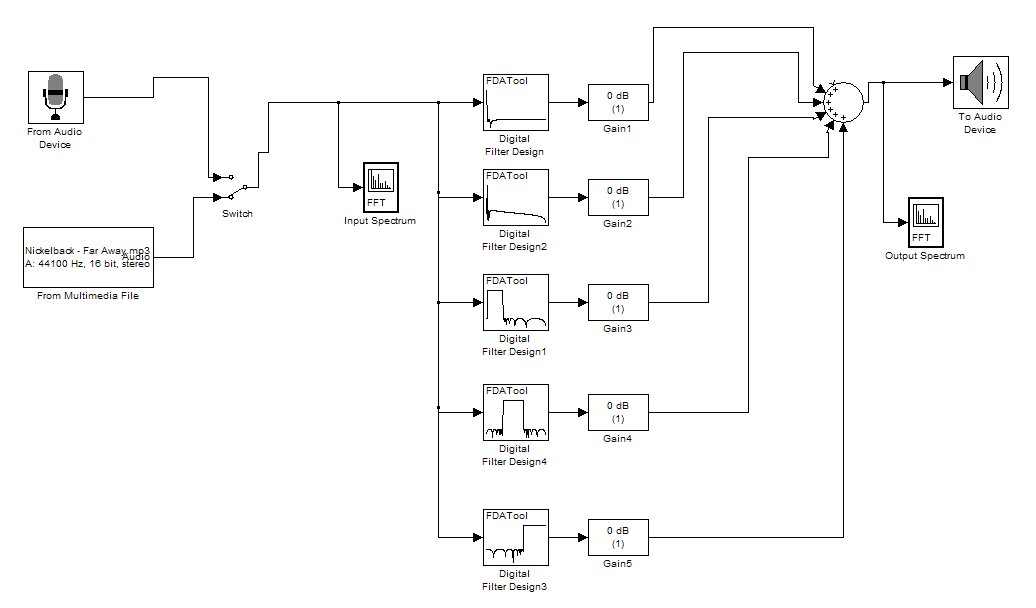
Рис. 8. Модель 5-ти полосного эквалайзера в среде Simulink.
В качестве источника аудио сигнала можно (но не обязательно в данной работе) использовать звук со встроенного в персональный компьютер микрофона (элементна схеме –FromAudioDevice) или из музыкального аудио файла (элементна схеме –FromMultimediaFile). Для переключения между источниками сигнала используется переключатель (элемент на схеме – Switch). Для воспроизведения звука используются встроенные в ПК динамики (элемент на схеме –ToAudioDevice).
Фильтрация отдельной полосы входного сигнала осуществляется соответствующим каждому фильтру элементом DigitalFilterDesign. Усиление или ослабление каждой полосы входного сигнала (выход каждого фильтра) регулируется элементом Gain и задается в дБ.
Выходной сигнал формируется, как сумма сигналов каждой полосы, с помощью сумматора с требуемым количеством входов.
Для графического представления спектра входного и выходного сигналов используются элементы SpectrumScope (InputSpectrumи OutputSpectrum).
Управление эквалайзером должно осуществляться с помощью графического интерфейса (рис. 9), разработанного в программе MATLABGUIDE. Интерфейс должен позволять независимо изменять коэффициент усиления каждой полосы эквалайзера в интервале от -10 дБ до +10 дБ с шагом 1 дБ.
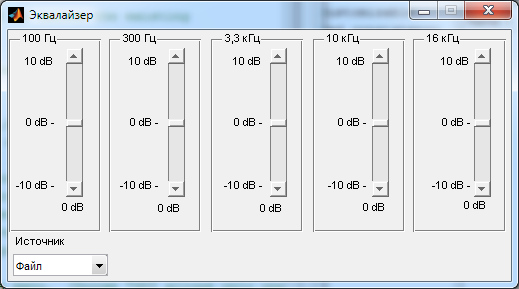
Рис. 9. Пример интерфейса(без кнопок включения и выключения).