

2.1. Властивості промислових мереж
2.1.1. Визначення промислової мережі та їх градація
Визначення «польова шина» згідно з ДСТУ. Згідно з українськими стандартами ДСТУ, Польова шина — це локальна мережа з лінійною топологією, призначеною для інформаційного обміну між проблемно і об'єктно орієнтованими блоками (пристроями) та територіально розосередженими джерелами: датчиками, перетворювачами, засобами ручного введення) та приймачами (підсилювачами, виконавчими пристроями, засобами віддзеркалення інформації).
Визначення «fieldbus» згідно з МЕК. У стандарті МЕК 61158 під терміном Fieldbus розуміється цифрова, послідовна, мультиточкова шина з промисловими інструментальними пристроями та пристроями управління такими, як — але не обмежено ними — датчиками, виконавчими механізмами та контролерами.
Визначення «промислова мережа» в даному посібнику. В даному посібнику англомовний термін Fieldbus (дослівний переклад «польова шина») перекладається як «промислова мережа».
У термінології МЕК є ряд обмежень, визначені словами «шина» («bus»), «мультиточкова» («multipoint»), в які не вписуються ряд промислових мереж. У визначенні ДСТУ фігурує централізований підхід, який характерний тільки для мереж рівня датчиків та виконавчих механізмів. Тому в даному посібнику під промисловою мережею розуміється промислова комунікаційна система з послідовною передачею бітів, яка використовує металевий кабель, оптоволокно або радіохвилі для зв'язку між мікропроцесорними засобами автоматизації. Слід зазначити, що в деяких джерелах терміни «польова шина» та «промислова мережа» не є синонімами.
Визначення, які наведеш в даному посібнику можуть не співпадати з прийнятими в інших джерелах.
28
2.1.1.4. Градація промислових мереж за застосуванням. У подальшому при розгляді матеріалу будемо використовувати умовний розподіл промислових мереж залежно від області застосування на два рівні.
Рівень датчиків, завданням мереж якого є безпосереднє або через модулі в-воду/виводу опитування датчиків і керування роботою різноманітних виконавчих механізмів. Умовно цей рівень можна розділити на два підрівні: рівень датчиків/виконавчих механізмів (Sensor/Actuator Level) та польовий рівня (Field Level). Перші призначені для роботи безпосередньо з інтелектуальними датчика-ми/ВМ, а другі — для зв'язку з польовими засобами (розподіленим засобами вводу/виводу, приводними засобами, операторськими терміналами та панелями). В даному посібнику оба типи мереж належать до рівня датчиків.
Рівень контролерів (Controller level або Cell Level), промислові мережі якого беруть участь у вирішенні завдань з керування виробництвом в цілому або комплексом технологічних процесів і забезпечують обмін між контролерами, засобами SCADA/HMI та засобами рівня АСУП.
Дане розділення є умовним і може не співпадати з прийнятими в інших джерелах.
2.1.2. Функціональне призначення промислових мереж
Розглянуті у першому розділі типові програмно-технічні засоби та особливості обміну між ними дозволять визначити типові функції промислових мереж. До них можна віднести:
Обмін даними процесу в реальному часі.
Програмування та конфігурація вузлів.
Діагностика вузлів.
Управління станом вузла.
Функції резервного переключення між вузлами мережі.
Обмін даними процесу у реальному часі. Це одна з найважливіших функцій реалізації промислової мережі як рівня датчиків так і рівня контролерів. Дані технологічного процесу постійно змінюються в часі, тому необхідно їх доставити від джерела до споживача в потрібному обсязі, за визначений інтервал часу. Доставка даних процесу в реальному часі є одним із показників ефективності конкретної реалізації мережі. Фізичні рамки реального часу чисельно визначаються для конкретної системи управління. Тому одне рішення може задовольняти вимогам реального часу для однієї системи та зовсім не задовольняти для іншої. Відповідно до стандартів ДСТУ, режимом реального часу називається режим оброблення даних, який забезпечує взаємодію обчислювальної системи із зовнішніми, відносно до неї, процесами у темпі, порівнянному зі швидкістю перебігу цих процесів.
Програмування та конфігурування вузлів. За допомогою функцій програмування та конфігурування більшість сучасних мікропроцесорних засобів, зокрема контролери та периферійні ПТЗ, можуть програмуватись із використанням спеціалізованого програмного забезпечення, встановленого на ПК або про-граматорі. На відміну від функцій обміну даними процесу, ці функції не передбачають жорстких вимог до обміну в реальному часі.
29
Ф
 ункції
діагностики. Діагностика
роботи вузлів мережі є такою ж важливою,
як і діагностика складових будь-якої
мікропроцесорної системи. Функції
діагностики дозволяють визначити факт
(функція виявлення аварії) та причину
відмови пристрою (ідентифікація аварії),
що дозволяє визначити та замінити
дефектний вузол, а в системах з
резервуванням {standby)
—
переключитися на резервні підсистеми.
Вияв факту несправності вузла повинен
бути визначений в режимі реального
часу, для можливості зворотної реакції
системи на збій, що особливо стосується
функціонально небезпечних процесів.
Тому ця функція базується на
високопріоритетних повідомленнях.
Ідентифікація аварії, як правило,
потрібна
для обслуговуючого персоналу, для
можливості усунення проблеми, тому
особливих вимог до реального часу не
потребує.
ункції
діагностики. Діагностика
роботи вузлів мережі є такою ж важливою,
як і діагностика складових будь-якої
мікропроцесорної системи. Функції
діагностики дозволяють визначити факт
(функція виявлення аварії) та причину
відмови пристрою (ідентифікація аварії),
що дозволяє визначити та замінити
дефектний вузол, а в системах з
резервуванням {standby)
—
переключитися на резервні підсистеми.
Вияв факту несправності вузла повинен
бути визначений в режимі реального
часу, для можливості зворотної реакції
системи на збій, що особливо стосується
функціонально небезпечних процесів.
Тому ця функція базується на
високопріоритетних повідомленнях.
Ідентифікація аварії, як правило,
потрібна
для обслуговуючого персоналу, для
можливості усунення проблеми, тому
особливих вимог до реального часу не
потребує.Функції управління станом вузла. Ці функції необхідні для можливості запуску, перезапуску, зупинки роботи програмного забезпечення та ініціалізації вузла. Враховуючи можливість функціонування декількох вузлів у системі, команди управління станом вузла мають нижчий пріоритет перед обміном даними процесу в реальному часі.
Резервування вузлів у системі. За рахунок цих функцій промислова мережа дає зручний і порівняно недорогий спосіб підвищення живучості та надійності системи. Технічні засоби систем з резервуванням діляться на основні або первинні (Primary) та резервні (Standby). В нормальному режимі функціонування у системі працюють основні вузли, за виходу яких з ладу їх функції беруть на себе резервні. В таких системах промислові мережі забезпечують можливість самодіагностики вузлів, тобто вияву дефектних засобів, переключення на резервні вузли та підтримку каналів зв'язку з основними та резервними засобами. Промислова мережа може забезпечити:
резервування віддалених периферійних засобів;
резервування контролерів;
резервування серверів SCADA;
резервування каналів зв'язку: контролер <-> периферійні засоби, контролер <-> SCADA/HMI, контролер <-> контролер та інші.
Функції мереж в системах з резервуванням розглянемо на прикладі.
— Приклад 2.1. Основні концепції. HotStandby. ————_____
Завдання. Продемонструвати функціонування системи з резервуванням контролера, на прикладі рішення HotStandby («гарячого резервування») запропонованого Шнейдер Електрик.
Рішення.
На рис. 2.1 показана структура системи, в якій первинний контролер обмінюється процесними даними з віддаленими пристроями вводу/виводу (Remote I/O) через промислову мережу МЗ. З іншого боку, засоби людино-машинного інтерфейсу обмінюються з контролером через мережу МІ.
Для функціонування такої системи резервний контролер працює паралельно з основним контролером, отримуючи від нього контекст задач з промислової мережі М2. Конфігурація та програма обох контролерів ідентичні. Передача контексту забезпечується в реальному часі зі швидкістю, що дозволяє у
ЗО
будь-який
момент часу продовжити виконання
програми резервним контролером
з того місця, де закінчив первинний.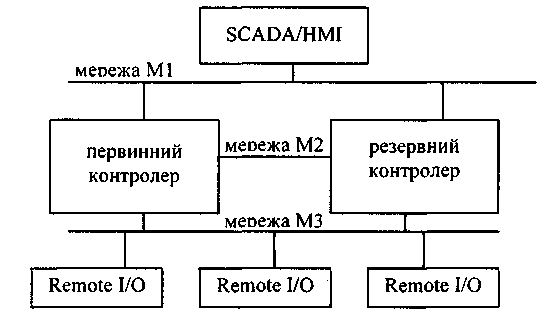
і
І У нормальному, тобто штатному режимі роботи системи первинний конт-j ролер обмінюється даними з віддаленими входами/виходами та зі SCADA/HMI, І а також передає контекст своїх задач резервному контролеру. Резервний конт-{ ролер в цей час веде себе пасивно щодо всіх перелічених вузлів. За виходу з і ладу первинного контролера резервний контролер втратить з ним зв'язок і пе-і рейде в режим активної роботи, забезпечуючи обмін процесними даними з ! входами/виходами по мережі МЗ та зі SCADA/HMI по мережі МІ. Слід зазна-j чити, що SCADA/HMI, втративши зв'язок з первинним контролером повинна і перейти на зв'язок з резервним.