

2.4.4. Нелинейные последовательности
Для повышения помехозащищенности специальных перспективных систем связи применяют нелинейные ПСП, обладающие более высокой непредсказуемостью и объемом системы сигналов.
В качестве оценки
непредсказуемости нелинейных ПСП
принимают длину
эквивалентного РСЛОС или эквивалентную
степень∙k характеристического полинома
(2.35) и называют её эквивалентной линейной
степенью (ЭЛС) ПСП.
Для М-последовательности ЭЛС равна∙k,
а для нелинейных ПСП ЭЛС может достигать
значения
![]() ,
т.е. периода ПСП, что обеспечивает
непредсказуемость нелинейных ПСП.
,
т.е. периода ПСП, что обеспечивает
непредсказуемость нелинейных ПСП.
Алгоритм синтеза
эквивалентного РСЛОС по известному
принятому сегменту ПСП называют
алгоритмом Берлекэлепа-Месси
[7], ускоренный алгоритм реализации
которого требует
![]() операций.
операций.
Однако, в отличие от М – последовательностей сумма двух сдвинутых нелинейных последовательностей не является циклически сдвинутой относительно исходной нелинейной последовательности. Это свойство нелинейных последовательностей приводит к росту боковых пиков КФ по сравнению с М – последовательностями.
В настоящее время известны следующие нелинейные ПСП [5]:
1. Последовательности де Брейна, генерируемые РС с нелинейной обратной связью (рис.2.11 а).


Рис.2.11. Схемы формирования нелинейных ПСП.
2. Последовательности, формируемые применением нелинейной внешней логики для комбинирования символов РСЛОС и имеющие период (длину) N = (2k-1) (риc.2.11 б).
3. Составные нелинейные ПСП, формируемые чередованием символов с выходов двух и более РСЛОС по определенному правилу (рис.2.11 в).
а). Последовательности де Брейна имеют максимально возможный период N=2k и большой ансамбль сигналов
![]() (2.58)
(2.58)
и высокую непредсказуемость, определяемую ЭЛС:
![]() , (2.59)
, (2.59)
которая зависит от способа формирования ПСП.
При этом эти ПСП приближаются по статистическим свойствам к СП (нормальное распределение блоков в последовательности, сбалансированность «1» и «0» в периоде).
Наиболее простым
является способ генерации последовательности
де Брейна на основе РСЛОС формирования
М-последовательности (рис.2.6). При этом
в цепи обратной связи используется
дополнительная нелинейная цепь в виде
схемы совпадения «И», на входы которой
поступают сигналы с инверсных выходов
![]() l-ых
триггеров РС, а выход подключен к входу
триггера Т1
(рис.2.12) через дополнительный сумматор.
l-ых
триггеров РС, а выход подключен к входу
триггера Т1
(рис.2.12) через дополнительный сумматор.
T1 T2 T3 Tk-1 Tk







![]()
![]()
![]()
![]()
X
X
X
X
X
X
 C1
C2
C3
Ck-2
Ck-1
Сk
C1
C2
C3
Ck-2
Ck-1
Сk



И
Рис.2.12. Схема формирования нелинейной ПСП де Брейна.
Нелинейная ПСП содержит все возможные комбинации (полный код)
длительностью
![]() ,
включая нулевую.
,
включая нулевую.
Прямой символ на
входе l-го
триггера на j+1
такте равен
![]() и символ на входе первого триггера на
j-м
такте равен:
и символ на входе первого триггера на
j-м
такте равен:
![]() ,
(2.60)
,
(2.60)
где ![]() .
.
Используя очевидного
равенство для выходов триггера
![]() можно из (2.60) получить аналогично (2.33)
нелинейное рекуррентное уравнение
формирования ПСП (для символа на входе
Т1
в j-м
такте) в виде:
можно из (2.60) получить аналогично (2.33)
нелинейное рекуррентное уравнение
формирования ПСП (для символа на входе
Т1
в j-м
такте) в виде:
![]() . (2.61)
. (2.61)
Хотя последовательность де Брейна, построенная данным способом, обладает ЭЛС=(2k-1), многие авторы оспаривают эту цифру. Считают, что вся ПСП определяется также по 2k известным символам (не содержащим состояния из k нулей), т.к. она повторяет структуру М-последовательности. Общее число последовательностей ПСП для данного способа (сравни с (2.37)) равно:
![]() (2.62)
(2.62)
Другие способы построения ПСП де Брейна можно найти в [5].
Отметим, что
нелинейные ПСП де Брейна целесообразно
использовать в качестве синхронизирующих,
например, в ШСС. Эти ПСП имеют хорошие
периодические АКФ (ровное
плато около главного пика R(0)
и минимальное значение боковых пиков
![]() ).
).
б). Последовательности, формируемые нелинейной внешней логикой. ЭЛС характеристического полинома ПСП является мерой сложности эквивалентного РС и определяется числом корней характеристического полинома. Увеличить их число можно внешним нелинейным комбинированием символов с выходов триггеров РСЛОС генератора М-последовательности.
К росту ЭЛС генерируемой нелинейной ПСП в наибольшей степени приводит операция умножения символов, выполняемая схемой «И», но
ухудшаются условие сбалансированности кода и КФ, а ЭЛС равно:
![]() , (2.63)
, (2.63)
где
![]() - число операций умножения символов
РСЛОС, производимых нелинейной внешней
логикой; а k-
число каскадов РСЛОС.
- число операций умножения символов
РСЛОС, производимых нелинейной внешней
логикой; а k-
число каскадов РСЛОС.
При n → k, ЭЛС→ к значению 2k-1.
В [6] для формирования
нелинейных ПСП с асимптотически
оптимальными корреляционными свойствами
предложена нелинейная функция
комбинирования бент-функция (максимально
нелинейная), имеющая равномерный спектр
коэффициентов при разложении в дискретный
ряд Уолша - Адамара. При этом функция
комбинирования символов реализуется
в след-ортогональном базисе, используя
идентичное бент-функции след-ортогональное
преобразование степенного базиса поля
GF(2k),
формируемого РСЛОС. В результате выходные
бент-последовательности могут быть
синтезированы для четных
![]() и имеют период N=2k-1,
причем сбалансированы по числу «1» и
«0» и имеют 3-х уровневые АКФ и ВКФ со
значениями, не превышающими (2k/2+1),
что в
раз меньше, чем у кодов Голда. Число
нелинейных операций комбинирования
определяет ЭЛС ПСП:
и имеют период N=2k-1,
причем сбалансированы по числу «1» и
«0» и имеют 3-х уровневые АКФ и ВКФ со
значениями, не превышающими (2k/2+1),
что в
раз меньше, чем у кодов Голда. Число
нелинейных операций комбинирования
определяет ЭЛС ПСП:
![]() . (2.64)
. (2.64)
в). Составные нелинейные последовательности
Составными (комбинированными) называют последовательности, формируемые чередованием символов с выходов нескольких РСЛОС.
Простейший алгоритм формирования составной нелинейной ПСП – это перемножение символов с выходов двух РСЛОС, что соответствует перемножению элементов поля GF(2k) первого РСЛОС на элементы поля GF(2т) второго РСЛОС и получению элементов поля GF(2kт).
При этом порядок ЭЛС = kт, а период составной нелинейной ПСП равен НОК ( N1 =2k -1, N2 =2m -1).
Однако, при этом нарушается условие сбалансированности кода (умножение ведет к росту числа «0») и, соответственно, ухудшаются корреляционные характеристики.
Для обеспечения сбалансированности кода составной ПСП известны разные способы «перемешивания» символов с выходов РСЛОС [6,8]. Например, Дженнингс предложил [5] алгоритм чередования символов с выходов РСЛОС, который формирует ансамбль составных ПСП, удовлетворяющих большинству вышеприведенных требований и реализуется схемой рис.2.13 на основе мультиплексора, управляемого регистром RG2.
RG1 и RG2: –два РСЛОС с n и m каскадами соответственно. Обозначим их через А и В соответственно.

Рис.2.13. Схема формирования составной ПСП.
Алгоритм формирования нелинейной ПСП можно записать в следующем виде:
1.Выбирается целое k, 1≤ k ≤ m, такое что 2k-1≤ п, причем если
2m-1 ≥ п, то k = т.
2. Выбирается произвольно k каскадов задержки RG1 и, на каждый момент ti, двоичное k состояние преобразуется в десятичное число:
![]() ,
,
причем если
![]() .
.
3. Выбирается
отображение
![]()
Порядок поступления символов RG1 на выход генератора ПСП
![]()
т.е. в качестве элемента чередования символов RG1 используется мультиплексор, управляемый RG2.
Период составной
ПСП
![]() при этом число единиц
при этом число единиц
![]() и нулей
и нулей
![]() в периоде, а ЭЛС при k
= m
равна
в периоде, а ЭЛС при k
= m
равна
![]() . (2.65)
. (2.65)
При этом среднеквадратическое значение уровня боковых пиков АКФ
![]() . (2.66)
. (2.66)
Если n >> m , то большинство боковых пиков АКФ
![]() (2.67)
(2.67)
Однако, отдельные боковые пики, расположенные на позициях,
кратных
![]() могут превышать это значение.
могут превышать это значение.
Таким образом составные нелинейные ПСП обладают большой ЭЛС, хорошими характеристиками КФ и имеют более широкие возможности по генерации.
С другими алгоритмами генерации нелинейных ПСП, например, Касами – подобными нелинейными ПСП, студент может ознакомиться самостоятельно, используя литературу [6,7] и др. источники.
Псевдослучайные числовые последовательности
Следует отметить, что для защиты информации, например, в телекоммуникационных системах с кодовым разделением абонентов или компьютерных информационных сетях актуальными являются (в отличие от рассмотренных выше ШХС, получаемых оцифровкой уровней физического генерируемого случайного процесса) детерминированные вычислительные алгоритмы формирования ШХС в виде псевдослучайных числовых последовательностей.
Наиболее известными вычислительными алгоритмами являются [12] целочисленный конгруэнтный алгоритм Лемера и семейство алгоритмов Фибоначчи.
Алгоритм Лемера:
![]() (2.75)
(2.75)
где х0 , а, с – заданные целые числа, (причем х0 , а, с < M, а в качестве М взято некоторое большое число).
Алгоритмы Фибоначчи (алгоритмы с запаздыванием):
![]() (2.76)
(2.76)
где аi,
bj
равны нулю
или 1; Nz
- параметр
запаздывания,
![]() -
некоторый оператор, учитывающий фазовые
соотношения между запаздывающими
членами.
-
некоторый оператор, учитывающий фазовые
соотношения между запаздывающими
членами.
Случай
![]() соответствует обобщенному генератору
Фибоначчи:
соответствует обобщенному генератору
Фибоначчи:
![]() , (2.77)
, (2.77)
где параметр Nz - определяет число заданных (или вычисленных ранее) членов последовательности, которые надо хранить в памяти устройства, чтобы найти новый член ПСП на каждом следующим шаге алгоритма;
ап-i - коэффициенты, которые обычно считают равными нулю или 1. Классический алгоритм Фибоначчи учитывает только два члена ряда: вычисленный на предыдущем шаге (п-1) и вычисленный на шаге (п- Nz).
Размерность фазового пространства (ФП) динамической системы определяется числом величин, которые надо задать, чтобы однозначно описать её состояние и иметь возможность найти состояние системы на следующем шаге вычисления. Очевидно, что размерность ФП динами-ческой системы, описываемой алгоритмом с запаздыванием, определяется параметром запаздывания Nz.
В силу ограниченности ФП алгоритма, заданного на конечном интер-вале [1, М] целых чисел, общее число всех состояний счетно и конечно. Поэтому, начиная с некоторого шага, результаты вычисления обязательно повторят ранее полученные значения, т.е. система выйдет на цикл, период которого зависит от начальных условий.
Для разработчика представляют интерес задачи исследования
зависимости этих циклов (периодов) и максимальных периодов ПСП,
определяющих помехозащищенность системы, от изменения интервала
[1, М] чисел, на котором задан алгоритм, и параметра запаздывания Nz , т.е. размерности ФП. Авторы [12] исследовали указанные выше задачи для алгоритма типа Фибоначчи формирования ПСП целых чисел {xn} на заданном интервале [1, М] с параметром запаздывания Nz:
xn= xn-1 + xn-Nz , (2.78)
где величина суммы xn при вычислениях может быть меньше или равна 2М и выходит за верхнюю границу М области определения алгоритма. Поэтому этот алгоритм может быть дополнен оператором возвращения в указанный интервал [1, М], который реализует механизм перемешивания вычисленных чисел ПСП с определенным распределением вероятностей.
Авторами использован оператора возвращения - «сшивание» концов интервала, т.е. превышение разности (xn–М) над величиной М прибавляется к величине нижней границы интервала, т.е. xn= xn – М.
Для вычисления
значений ПСП, формируемой этим алгоритмом,
необходимо задать параметры М
, Nz
и массив памяти (вектор запаз-дывания)
![]() ,
т.е. ряд начальных значений, состоящий
из Nz
целых чисел на интервале [1, М].
ФП такой системы имеет размерность
,
т.е. ряд начальных значений, состоящий
из Nz
целых чисел на интервале [1, М].
ФП такой системы имеет размерность
![]() и состоит из совокупности точек с
координатами из интервала чисел [1, М],
однозначно определяющих состояние
системы.
и состоит из совокупности точек с
координатами из интервала чисел [1, М],
однозначно определяющих состояние
системы.
Результаты исследования состояний динамической системы в ФП для данного алгоритма и более простого двумерного случая: Nz = 2 и М = 8 представлены на рис.2.16.
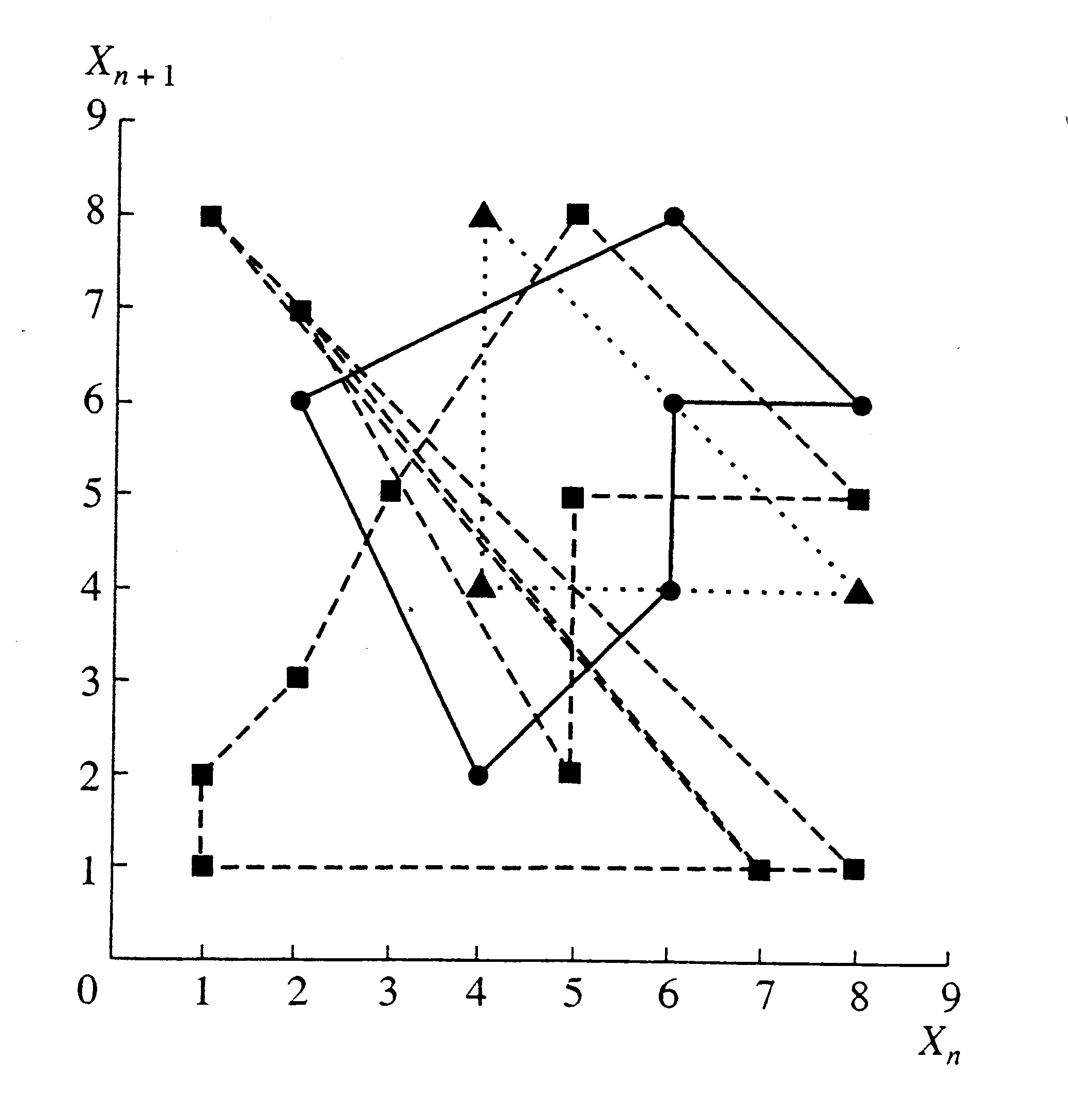
Рис.2.16. Последовательность состояний динамической системы в двумерном ФП для параметров алгоритма: М =8, Nz=2. Фазовые траектории циклов: с периодом Т(1)8,2=3 (треугольники), Т(2)8,2 = 6 (кружочки), Т(4)8,2 = 12 (квадратики).
Эти результаты позволяют выявить следующие общие закономерности формируемых ПСП этим алгоритмом для случая больших размерностей Nz и значений М:
ФП алгоритма представляет набор циклов различного периода. Каждая точка состояния системы принадлежит только одному циклу, т.е. циклы не имеют общих точек.
Как правило, при заданных М и Nz, в ФП существует несколько различных циклов одинакового периода. Они отличаются совокупностью точек ФП. Число циклов с одинаковым периодом обозначим через ν: Т(ν)М,Nz. Например, на рис.2.16 Т(2)8,2 = 6 означает, что при М =8, Nz=2 в ФП существует два цикла с периодом равным 6.
При любых М и Nz точка, все координаты которой равны М, является изолированной, что следует из формулы (2.78) и операции возврата.
Точка с координатами (1,1,…1) при любых М и Nz всегда лежит на цикле с максимальным периодом. Точки (1,1,…1) и (М, М,…М) являются особенными во всем ФП.
Сумма точек состояний в ФП динамической системы по всем циклам всегда равна полному объему ФП:
 .
На рис.2.16 показаны три из 8 существующих
фазовых траекторий (ФТ): Т(1)8,2=3;
Т(2)8,2=6;
Т(4)8,2=12,
а объем ФП равен 64, что совпадает с
суммой точек по всем ФТ с учетом особой
точки: (1+2+2×6+4×12=64).
.
На рис.2.16 показаны три из 8 существующих
фазовых траекторий (ФТ): Т(1)8,2=3;
Т(2)8,2=6;
Т(4)8,2=12,
а объем ФП равен 64, что совпадает с
суммой точек по всем ФТ с учетом особой
точки: (1+2+2×6+4×12=64).
Отметим, что ФТ при размерности ФП > 3 можно изучать только по их проекциям на соответствующие двумерные плоскости ФП рис.2.16.
Исследования также показали, что когда число М является не простым, а имеет сомножители, то ФТ ПСП воспроизводит ФТ сомножителей в большем масштабе и с тем же периодом. Кроме того, максимальный период ПСП растет при увеличении М, но не монотонно, т.к. не все простые числа М обеспечивают достижение максимального периода, т.е. простое число М не является для этого достаточным условием.
Следует отметить, что наличие в ФП большого числа циклов нежелательно, т.к. это приводит к уменьшению доли объёма ФП, который может быть занят циклами с максимальным периодом.