

9. Геометро-кинематические условия существования эвольвентного зацепления
-
Основная теорема зацепления применительно к эвольвентному зацеплению записывается так:
![]() (3.95)
(3.95)
где rw1, rw2, rb1, rb2 – радиусы начальных и основных окружностей.
-
Полный коэффициент перекрытия является суммой торцового коэффициента перекрытия и осевого коэффициента перекрытия , т.е.
= + . (3.96)
Значение торцового коэффициента перекрытия может быть вычислено как отношение длины активной линии зацепления g к шагу эвольвентного зацепления р:
![]() .
(3.97)
.
(3.97)
А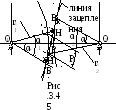 ктивная
линия зацепления
– участок линии зацепления, в точках
которого последовательно соприкасаются
взаимодействующие профили зубьев. При
отсутствии подрезания этот участок
заключен между точками Н1
и Н2
(рис. 3.45). Шагом
зацепления
р
называется расстояние по контактной
нормали
(нормаль к главным профилям в точке их
касания) между двумя контактными точками
одноименных главных профилей соседних
зубьев:
ктивная
линия зацепления
– участок линии зацепления, в точках
которого последовательно соприкасаются
взаимодействующие профили зубьев. При
отсутствии подрезания этот участок
заключен между точками Н1
и Н2
(рис. 3.45). Шагом
зацепления
р
называется расстояние по контактной
нормали
(нормаль к главным профилям в точке их
касания) между двумя контактными точками
одноименных главных профилей соседних
зубьев:
р = mcos. (3.98)
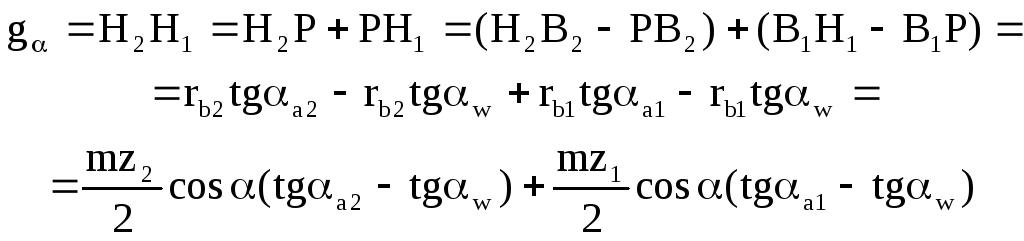
Длина активной линии зацепления g:
З десь
радиус основной окружности rb
получен из прямоугольного треугольника
(рис. 3.46), где гипотенуза – радиус
делительной окружности (r
= mz/2),
а прилежащий катет – радиус основной
окружности:
десь
радиус основной окружности rb
получен из прямоугольного треугольника
(рис. 3.46), где гипотенуза – радиус
делительной окружности (r
= mz/2),
а прилежащий катет – радиус основной
окружности:
![]() . (3.99)
. (3.99)
Окончательно
![]() . (3.100)
. (3.100)
Подставляя (3.98) и (3.100) в (3.97), получаем выражение для вычисления коэффициента торцового перекрытия:
![]() . (3.101)
. (3.101)
Для прямозубых зубчатых колес обычно < 1,7. Для увеличения коэффициента перекрытия используют косозубые колеса, тогда добавляется коэффициент осевого перекрытия , который может быть вычислен как отношение рабочей ширины венца передачи bw к осевому шагу рх (рис. 3.47):
![]() ,
(3.102)
,
(3.102)
г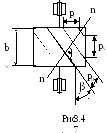 де
mn
– расчетный или нормальный модуль, т.е.
модуль в нормальном сечении nn.
де
mn
– расчетный или нормальный модуль, т.е.
модуль в нормальном сечении nn.
-
Определим условие отсутствия подрезания в прямозубой эвольвентной передаче. На рис. 3.48 изображено зацепление колеса с инструментальной рейкой (станочное зацепление) в момент, когда на линии зацепления РВ1 располагается точка притупления прямолинейного профиля рейки и, следовательно, на зубчатом колесе формируется граничная точка L (граничная точка – общая точка эвольвентной части профиля зуба и переходной кривой). Средняя линия (делительная прямая) рейки не касается делительной окружности, а смещена относительно нее на расстояние, называемое смещением и выражаемое в долях модуля: хm, где х – коэффициент смещения.
Определим радиус кривизны L эвольвенты в граничной точке.
![]() (3.103)
(3.103)

Для того, чтобы не было подрезания, надо, чтобы радиус кривизны эвольвенты был неотрицательным: L 0. Из (3.103) следует, что
![]() (3.104)
(3.104)
При отсутствии смещения (х = 0) zmin = 17; при меньшем числе зубьев будет подрезание. Если же необходимо нарезать колесо с числом зубьев z < 17, то необходимо выполнить смещение инструмента при нарезании, причем наименьший коэффициент смещения xmin:
![]() (3.105)
(3.105)
-
Заострение зубьев возникает тогда, когда точка пересечения разноименных теоретических профилей зуба располагается внутри окружности вершин. Обычно принимают толщину зуба по дуге окружности вершин
![]() (3.105)
(3.105)
для кинематических передач (т.е. для тех передач, которые не предназначены для передачи больших нагрузок) и
![]() (3.106)
(3.106)
-
Интерференция зубьев будет отсутствовать, если эвольвентный профиль зуба одного зубчатого колеса сопрягается только с эвольвентным профилем зуба другого колеса. Для этого необходимо, чтобы радиус граничной точки rLi был меньше радиуса rpi нижней точки активного профиля (рис. 3.49):
![]()
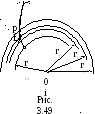 i
= 1, 2
i
= 1, 2
(3.107)
Удовлетворение неравенства (3.107) для обоих зубчатых колес является отсутствием интерференции в зубчатой передаче.