

5. Структурные преобразования механизмов
Представление механизма в виде структурных групп зависит от расположения входа (входного звена). Если перенести вход в механизме, то изменится его структура. Структурное преобразование состоит в условном перенесении входов, целью которого является упрощение структуры механизма.
Р ассмотрим
механизм, представленный на рис. 1.24, а.
Если в качестве входного звена выбрать
звено DF, то весь механизм
разобьется на три структурные группы:
однозвенную одноподвижную (звено DF со
вращательной КП), диаду ВВВ (звенья CD и
CE с тремя вращательными КП) и еще одну
диаду ВВВ (звенья ОА и АВ с тремя
вращательными парами). Граф структуры
преобразованного механизма представлен
на рис. 1.24, б. В результате структурного
преобразования мы условно избавились
от громоздкой четырехзвенной группы,
заменив ее на две диады.
ассмотрим
механизм, представленный на рис. 1.24, а.
Если в качестве входного звена выбрать
звено DF, то весь механизм
разобьется на три структурные группы:
однозвенную одноподвижную (звено DF со
вращательной КП), диаду ВВВ (звенья CD и
CE с тремя вращательными КП) и еще одну
диаду ВВВ (звенья ОА и АВ с тремя
вращательными парами). Граф структуры
преобразованного механизма представлен
на рис. 1.24, б. В результате структурного
преобразования мы условно избавились
от громоздкой четырехзвенной группы,
заменив ее на две диады.
При исследовании механизмов с несколькими степенями подвижности часто используется структурное преобразование, называемое, по предложению проф. М.З.Коловского, структурной инверсией. При структурной инверсии выходные координаты механизма (координаты рабочих органов) рассматриваются как входные, а обобщенные координаты входных звеньев и пар – как выходные.
Рассмотрим пример.
На рис. 1.25, а представлена схема плоской
платформы. Число степеней подвижности
по формуле Чебышева Wп=3(6-1)-26=3.
Следовательно, в механизме надо задать
три входа: q1, q2, q3. В
случае, если эти входы заданы так, как
показано на рисунке, механизм распадается
на следующие структурные группы: две
однозвенные одноподвижные (звенья ОА
и DE с вращательным КП) и
одну трехзвенную одноподвижную (звенья
АВ, ВС, CD с четырьмя
вращательными КП). Граф структуры такого
механизма показан на рис. 1.25, б. Выходными
координатами в этом случае являются
координаты некоторой точки М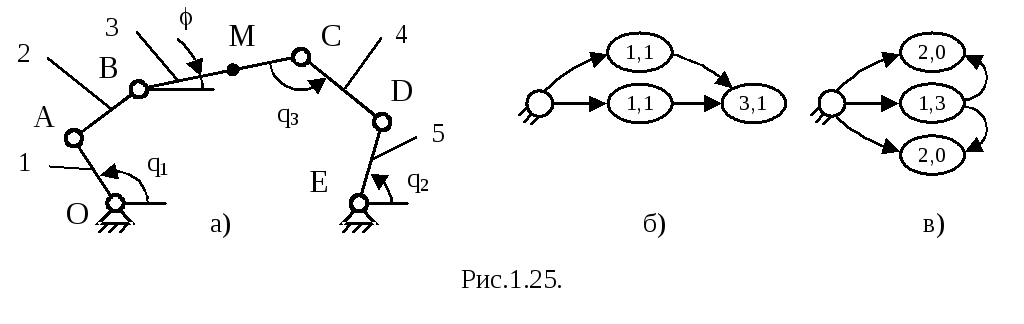 звена ВС и угол наклона этого звена .
Выполним структурную инверсию механизма.
Примем координаты хм, ум,
за входные, а обобщенные координаты q1,
q2, q3
– за выходные. Тогда структура механизма
изменится, а граф структуры будет таким,
как показано на рис. 1.25, в: к стойке
присоединена однозвенная трехподвижная
группа (звено ВС: W=31-0=3),
которая связана с двумя группами Ассура
типа ВВВ (диады, включающие в себя звенья
ОА и АВ с одной стороны, и CD
и DE – с другой). Тем самым
мы понизили максимальное число звеньев
в структурных группах с трех до двух.
звена ВС и угол наклона этого звена .
Выполним структурную инверсию механизма.
Примем координаты хм, ум,
за входные, а обобщенные координаты q1,
q2, q3
– за выходные. Тогда структура механизма
изменится, а граф структуры будет таким,
как показано на рис. 1.25, в: к стойке
присоединена однозвенная трехподвижная
группа (звено ВС: W=31-0=3),
которая связана с двумя группами Ассура
типа ВВВ (диады, включающие в себя звенья
ОА и АВ с одной стороны, и CD
и DE – с другой). Тем самым
мы понизили максимальное число звеньев
в структурных группах с трех до двух.

-
Повторить по лекции 2:
Модели:
Термины:
-
избыточная связь;
-
плоский механизм;
-
плоская группа Ассура.
-
шарнирный четырехзвенник;
-
кулак;
-
толкатель;
Формулы:
-
диада;
-
формула Чебышева для определения числа степеней подвижности плоского механизма.
-
структурное преобразование;
-
структурная инверсия.
-