

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / ЛК15
.DOCА.Н.Евграфов, Г.Н.Петров. Теория механизмов и машин. Лекция 15.
12. Выбор коэффициентов смещения. Блокирующий контур
Выбор коэффициентов смещения во многом определяет геометрию и качественные характеристики зубчатой передачи. Возможность назначать смещения по своему усмотрению, не усложняя производства зубчатых колес, дает конструктору удобное средство управления геометрией и качественными показателями зубчатой передачи с сохранением ее габаритов. Однако коэффициенты смещения, выгодные, например, по изгибной прочности или по удельному скольжению, вовсе не являются таковыми с точки зрения достижения максимальной контактной прочности или максимального коэффициента перекрытия. Кроме того, выбранные коэффициенты смещения должны задавать передачу из области ее существования, т.е. в передаче должны отсутствовать подрезание, заострение, интерференция и обеспечиваться плавность ее работы.
Противоречивость влияния смещений на геометрию и качественные показатели передачи приводит к заключению, что универсальных рекомендаций для их определения не может быть. В каждом конкретном случае коэффициенты смещения следует назначать с учетом условий работы зубчатой передачи. Один из наиболее распространенных методов выбора коэффициентов смещения – метод «блокирующих контуров».
Зависимость геометрических параметров и качественных показателей прямозубой прямозубой цилиндрической передачи от коэффициентов смещения можно показать с помощью кривых, построенных для каждого конкретного сочетания числе зубьев z1 и z2 в плоской системе координат x1, x2. В указанной системе координат каждая зубчатая передача с определенными значениями коэффициентов смещения изображается единственной точкой.
Множество точек координатного поля соответствует множеству вариантов передачи, которые можно получить при одних и тех же числах зубьев, но при различных коэффициентах смещения. Эти передачи неравноценны по своим качественным показателям, и из них надо выбирать наивыгоднейшую. При этом надо иметь в виду, что некоторые точки поля неприемлемы, так как при соответствующих им значениях x1 и x2 может быть интерференция или заострение зубьев, снижение коэффициента перекрытия и переход за предельной значение = 1 и т.п.
Предельному значению каждого из ограничивающих факторов в системе (x1, x2) соответствует определенная линия (или линии), отделяющая зону допустимых значений x1 и x2 от зоны недопустимых, где передачи без указанных выше нежелательных явлений не существуют. Совокупность этих линий называется блокирующим контуром. Блокирующие контуры были разработаны группой российских ученых во главе с И. А. Болотовским. Форма и расположение линий блокирующего контура зависят от числа зубьев зубчатых колес и применяемого инструмента.
На рис. 3.59 приведен
пример блокирующего контура. Линии 1 и
2 ограничивают существование передачи
из-за интерференции но ножке зуба колеса
с числом зубьев z2
(![]() ;
обычно зубчатое колесо с числом зубьев
z2
называют просто колесом);
3 и 4 – из-за возникновения интерференции
на ножке зуба колеса с числом зубьев z1
(зубчатое колесо с числом зубьев
;
обычно зубчатое колесо с числом зубьев
z2
называют просто колесом);
3 и 4 – из-за возникновения интерференции
на ножке зуба колеса с числом зубьев z1
(зубчатое колесо с числом зубьев
![]() называют
шестерней);
5 – линия коэффициента перекрытия
= 1. Запретные зоны заштрихованы. Внутри
контура нанесены линии условных границ,
выходить за которые не разрешается. Эти
условные границы назначаются
проектировщиком в каждом конкретном
случае отдельно, с учетом условий работы
передачи. К таким линиям относятся,
например, линии, соответствующие
значениям
= 1,2, sa
= 0,25m,
sa
= 0,4m,
а также линия начала подрезания реечным
инструментом x
= xmin.
называют
шестерней);
5 – линия коэффициента перекрытия
= 1. Запретные зоны заштрихованы. Внутри
контура нанесены линии условных границ,
выходить за которые не разрешается. Эти
условные границы назначаются
проектировщиком в каждом конкретном
случае отдельно, с учетом условий работы
передачи. К таким линиям относятся,
например, линии, соответствующие
значениям
= 1,2, sa
= 0,25m,
sa
= 0,4m,
а также линия начала подрезания реечным
инструментом x
= xmin.
К роме
того, внутри блокирующего контура
нанесены линии качественных показателей:
роме
того, внутри блокирующего контура
нанесены линии качественных показателей:
-
Линии коэффициентов смещения, при которых обеспечивается равнопрочность зубьев по изгибу, если материалы и термическая обработка обоих колес одинаковы. Линия, обозначенная буквой а, соответствует случаю, когда ведущей является шестерня, а линия, обозначенная буквой b – случаю, когда ведущим является колесо.
-
Линия коэффициентов смещения, при которых выравнены максимальные удельные скольжения на начальных ножках обоих зубчатых колес. Эта линия обозначена 1 = 2.
Пример 1 выбора коэффициентов смещения. Дано: z1, z2, sa1>0,4m, sa2>0,4m, > 1,2, отсутствие подрезания. Решение. Находим блокирующий контур для заданного сочетания z1 и z2. Искомая область заключена между кривыми sa1 = 0,4m, sa2 = 0,4m, выше линии x2 = x2min и правее линии x1 = x1min. Коэффициенты смещения возрастают в направлении от правого верхнего края блокирующего контура к левому нижнему. Следовательно, коэффициенты смещения, обеспечивающие наибольший коэффициент перекрытия и выполнение всех заданных требований – на пересечении линий x1 = x1min и x2 = x2min.
Пример 2. Найти коэффициенты смещения для передачи с заданным межосевым расстоянием аw. Решение. Из формулы (3.116) найдем угол зацепления:
![]() ,
,
а из выражения (3.115) – сумму коэффициентов смещения x:
![]() .
.
Затем на блокирующем контуре по двум точкам (х1 = x и х2 = x) строится линия, соответствующая найденному значению x. Значения х1 и х2 выбираются на прямой x с учетом желательных качественных показателей передачи.
Блокирующие контуры для косозубых передач не построены. Однако существуют компьютерные вычислительные программы, позволяющие с помощью ЭВМ выбирать коэффициенты смещения для косозубых цилиндрических передач (например, программа, разработанная на кафедре ТММ СПбГТУ).
13. Точность рычажных механизмов
До сих пор мы рассматривали такие модели механизмов, в которых предполагалось, что размеры звеньев точно соответствуют расчетным. Однако из практики известно, что все размеры звеньев имеют некоторые отклонения от заданных. Это связано и с погрешностью изготовления, сборки, монтажа деталей и узлов, и с упругими, температурными и т.д. деформациями, и с погрешностью измерения. Рассмотрим модели механизмов, в которых размеры звеньев отличаются от номинальных (задаваемых на чертежах). Такие отклонения называют геометрическими ошибками и обозначают 1, 2, …, m. Отклонения входных обобщенных координат q1, q2, … qw от программных значений называют кинематическими ошибками. Причиной их появления являются погрешность отработки двигателем входных сигналов, неточность и деформируемость привода, зазоры в кинематических парах и т.д. Выделяют две задачи точностного (или параметрического) анализа:
-
Прямая задача: как точно механизм воспроизведет заданную траекторию или функцию положения?
-
Обратная задача: по заданной точности воспроизведения движения найти допустимые отклонения размеров звеньев.
Геометрические и кинематические ошибки – первоисточники погрешностей механизма, их называют первичными. Разницу между положением точки r точного и неточного механизма называют ошибкой положения хr точки r:
![]() (3.125)
(3.125)
|
где |
хr – |
координата точки r точного механизма; |
|
|
|
координата точки r неточного механизма, т.е. механизма, имеющего первичные ошибки. |
На рис. 3.60 показана
ошибка положения точки В
кривошипно-ползунного механизма
![]() ,
возникшая из-за погрешностей
,
возникшая из-за погрешностей ![]()
![]() е.
е.
О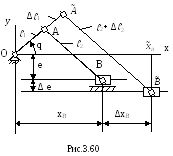 шибка
перемещения
Sr
точки r
– разница перемещений точки r
точного Sr
и неточного
шибка
перемещения
Sr
точки r
– разница перемещений точки r
точного Sr
и неточного
![]() механизма:
механизма:
![]() , (3.126)
, (3.126)
т .е.
ошибка перемещения точки может быть
определена как разность ошибок положения
в конце (2) и начале (1) ее движения. На
рис. (3.61) показан механизм при перемещении
входного звена из начального положения
1 в конечное положение 2.
.е.
ошибка перемещения точки может быть
определена как разность ошибок положения
в конце (2) и начале (1) ее движения. На
рис. (3.61) показан механизм при перемещении
входного звена из начального положения
1 в конечное положение 2.
Ошибки перемещения вызывают ошибки по скорости и по ускорению:
![]() ;
;
![]() .
(3.127)
.
(3.127)
О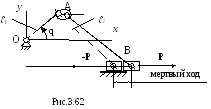 шибка,
называемая мертвым
ходом,
возникает из-за зазоров в кинематических
парах, деформации звеньев при изменении
направления рабочей нагрузки (рис.
3.62).
шибка,
называемая мертвым
ходом,
возникает из-за зазоров в кинематических
парах, деформации звеньев при изменении
направления рабочей нагрузки (рис.
3.62).
При определении ошибок принимают следующие допущения: первичные ошибки и ошибки механизма считают малыми; первичные ошибки считают независимыми.
Найдем связь между ошибкой положения и первичными ошибками. Для этого представим функцию положения точного механизма в виде:
![]() ,
(3.128)
,
(3.128)
где q1, …, qw – входные координаты, 1, …, m – номинальные размеры звеньев. Тогда функция положения точки r неточного механизма:
![]() ,
(3.129)
,
(3.129)
где q1, q2, … qw – ошибки входных координат (кинематические ошибки), а 1, 2, …, m – ошибки размеров звеньев (геометрические ошибки). Тогда ошибка положения хr точки r равна:
![]() .
(3.130)
.
(3.130)
Соответственно ошибка по скорости vr:
![]() . (3.131)
. (3.131)
Отметим, что частные производные определяются для точных механизмов.
Таким образом, для решения первой задачи точностного анализа надо задаться первичными ошибками (назначить допустимые отклонения размеров), найти частные производные от функций положения и определить ошибки положения по формуле (3.130). Обратная задача, как и всякая обратная задача, значительно сложнее. Ее можно решать методом последовательных приближений; здесь мы ее рассматривать не будем.
Определение ошибок механизма можно осуществить различными методами: аналитическим (метод дифференцирования), графоаналитическим (с помощью построения плана ошибок) и др.
Сущность аналитического метода заключается в составлении групповых уравнений и в дифференцировании их в частных производных по независимым параметрам q1, … , qw и 1, … , 1m.
Графоаналитический метод точностного анализа базируется на использовании замкнутого векторного контура и на построении плана ошибок.
Пример. Определим аналитическим методом ошибки положения хВ и 2 кривошипно-ползунного механизма, вызванные первичными ошибками q, l1, l2 , е (рис. 3.63).
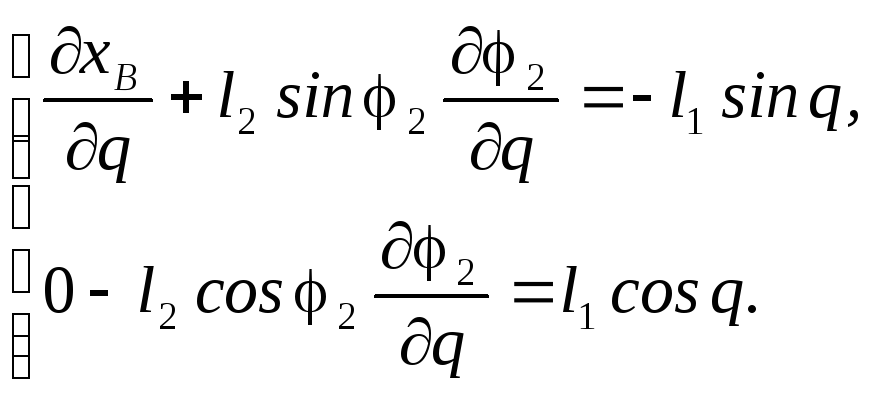
Составим групповые уравнения:
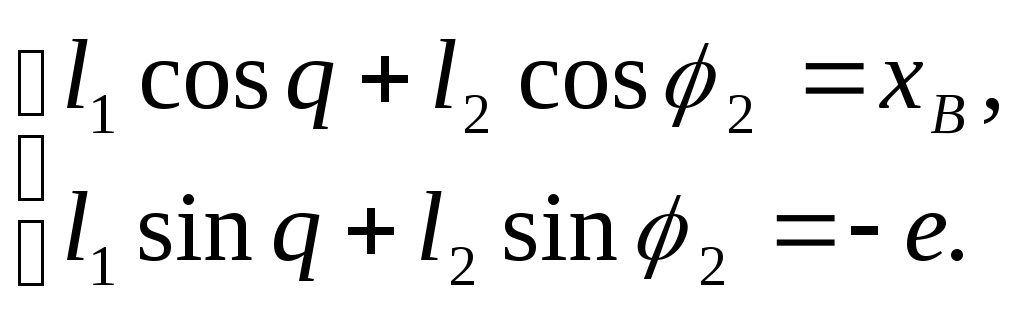 (3.132)
(3.132)
Д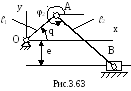 ля
отыскания производных
ля
отыскания производных
![]() и
и
![]() продифференцируем
(3.132) по координате q:
продифференцируем
(3.132) по координате q:
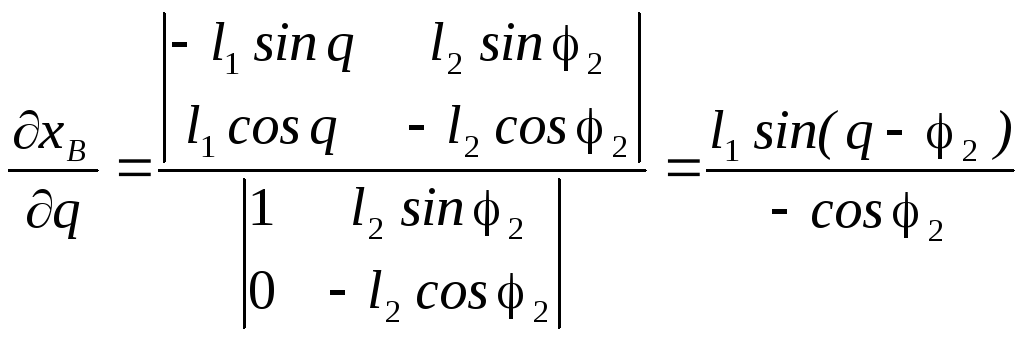
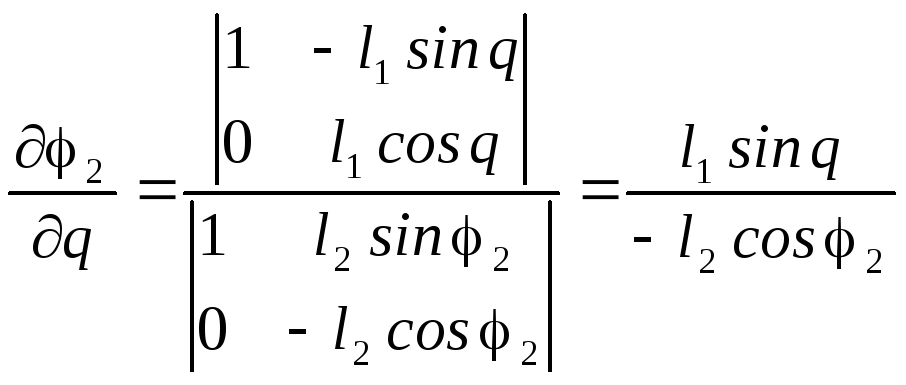
откуда по правилу Крамера найдем:
Для отыскания производных по параметру l1 зафиксируем координату q; дифференцируя систему (3.132) по l1, получим:
Отсюда найдем производные:
![]() ,
,
![]() .
.
Аналогично продифференцируем систему (3.132) по l2 и по е:
Соответственно получим частные производные по l2 и по е:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Ошибка положения 2 звена 2:
![]() .
.
Ошибка положения хВ точки В:
![]() .
.

Повторить по лекции 15:
-
Блокирующий контур;
Ошибка перемещения Sr;
Шестерня и колесо;
Мертвый ход;
Геометрические ошибки;
Аналитический метод точностного
Кинематические ошибки;
анализа;
Прямая задача точностного анализа;
Графоаналитический метод точност-
Обратная задача точностного анализа;
ного анализа.
Ошибка положения хr;