

1.Матрица перехода во вращательной кинематической паре.
П усть
звенья s
и (s-1)
связаны вращательной кинематической
парой (рис. 2.12). Обобщенная координата
qs
представляет собой угол поворота s-го
звена относительно (s-1)-го. Для определенности
условимся выбирать систему координат,
связанную с s-м
звеном, таким образом, чтобы ось 0zs
совпадала с осью вращения во вращательной
КП.
усть
звенья s
и (s-1)
связаны вращательной кинематической
парой (рис. 2.12). Обобщенная координата
qs
представляет собой угол поворота s-го
звена относительно (s-1)-го. Для определенности
условимся выбирать систему координат,
связанную с s-м
звеном, таким образом, чтобы ось 0zs
совпадала с осью вращения во вращательной
КП.
Выберем некоторое положение звена s за начальное и обозначим его знаком (*); соответственно s-я система координат в начальном положении будет обозначена 0s*хs*уs*zs*. В результате получили три системы координат: 0s-1xs-1ys-1zs-1, связанную со звеном (s-1), 0s*хs*уs*zs*, определяющую начальное положение s-го звена относительно (s-1)-го, и 0s*хs*уs*zs*, связанную с s-м звеном. Угол поворота системы координат 0sхsуszs относительно 0s*хs*уs*zs* является углом qs. В соответствии с (2.40) матрица направляющих косинусов Аs-1,s равна:
![]() (2.50)
(2.50)
Матрица Аs-1,s*(0) является постоянной, поскольку начальное положение s-го звена относительно (s-1)-го в процессе работы механизма не меняется. Матрица As*,s(qs) является функцией обобщенной координаты qs. Для ее
построения составим таблицу направляющих косинусов.
-
Xs
Ys
Zs
Xs*
Cos(qs)
Cos(qs+/2)
Cos(/2)
Ys*
Cos(3/2+qs)
Cos(qs)
Cos(/2)
Zs*
Cos(/2)
Cos(/2)
Cos(0)
Тогда матрица Аs*,s(qs) равна:
 (2.51)
(2.51)
Матрица Pz(qs) называется матрицей поворота. Матрица перехода во вращательной кинематической паре примет вид:
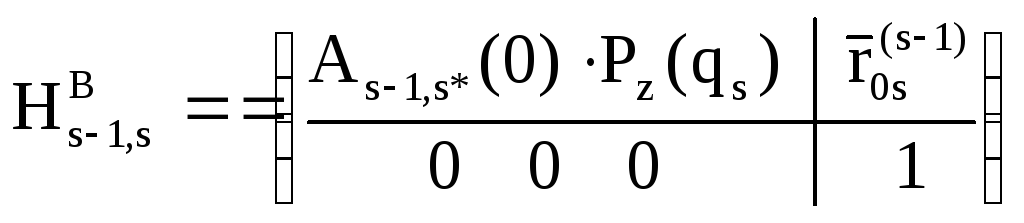 (2.52)
(2.52)
Отметим, что в матрице (2.52) переменной составляющей является только матрица поворота (2.51); остальные элементы – постоянные. Начальное положение s* удобно выбирать так, чтобы матрица As-1,s*(0) простой вид.
2.Матрица перехода в поступательной кинематической паре.
П усть
звенья s и (s-1) связаны поступательной
кинематической парой (рис. 2.13), тогда
усть
звенья s и (s-1) связаны поступательной
кинематической парой (рис. 2.13), тогда
обобщенная координата
qs
– поступательное перемещение звена s
относительно звена (s-1).
Свяжем со звеном (s-1)
систему координат 0s-1xs-1ys-1zs-1,
а со звеном s
– систему координат
0sxsyszs.
Для определенности условимся так
выбирать систему координат 0sxsyszs,
чтобы ось 0хs
совпадала с линией относительного
перемещения звеньев s
и (s-1).
Отметим, что в процессе работы механизма
углы между звеньями s и (s-1) и соответствующими
системами координат не меняются, поэтому
Аs-1,s=const;
перемещается точка отсчета 0s относительно
звена (s-1). Пусть в начальном положении
при qs
= 0 система 0sxsyszs
занимает положение 0s*xs*ys*zs*.
Начальное положение определяется
вектором
![]() . Найдем вектор
. Найдем вектор
![]() :
:

Составим матрицу перехода в поступательной паре:

Подчеркнем, что в матрице (2.54) переменным является только второй блок, определяющий положение точки 0s в системе координат (s-1).
Рассмотрим пример (рис. 2.14). Исполнительный механизм промышленного робота состоит из трех подвижных звеньев, связанных тремя кинематическими парами: двумя вращательными и одной поступательной. Из формулы Малышева следует, что механизм обладает тремя степенями подвижности: W=6(4-1)-53=3. Следовательно, надо задать три обобщенные координаты: q1, q2, q3. Свяжем с каждым из подвижных звеньев локальные системы координат 01x1y1z1, 02x2y2z2, 03x3y3z3 так, как показано на рисунке. Зададим начальное положение каждой из систем координат: 01*x1*y1*z1*, 02*x2*y2*z2*, 03*x3*y3*z3*. Для удобства зададим начальное положение звена 1 так, чтобы система координат 01*x1*y1*z1* совпадала с неподвижной системой 0x0y0z0. Зададим конструктивные параметры схемы a, b, c и входные обобщенные координаты q1, q2, q3. Требуется построить функцию положения точки М, принадлежащей третьему звену, или, иначе говоря,

найти координаты
точки М в неподвижной системе отсчета
 .
.
Решение. Положение точки М в системе координат 03х3у3z3 можно задать вектором-столбцом:

В
соответствии с (2.49)
![]() .
.
Составим матрицы перехода.

Для составления матрицы А12 построим таблицу направляющих косинусов:
-
X2
Y2
Z2
X1
0
0
1
Y1
0
-1
0
Z1
1
0
0
Тогда матрица перехода Н12(q2):

Для построения матрицы А23*(0) составим таблицу направляющих косинусов:
-
X3*
Y3*
Z3*
X2
0
1
0
Y2
-1
0
0
Z2
0
0
1
Найдем матрицу
перехода
![]() :
:

Подставляя найденные матрицы перехода, получим:
 Окончательное
выражение для
Окончательное
выражение для
![]() получить самостоятельно.
получить самостоятельно.