

.
3. Механизмы с линейной функцией положения
Широко распространены механизмы, функции положения которых могут быть выражены линейной зависимостью:
![]() ,
(3.39)
,
(3.39)
где φ и q – соответственно выходная и входная координаты, b, i –постоянные. Механизмы с линейной функцией положения обычно называют передачами. Дифференцируя (3.39) по времени, получим:
![]() .
(3.40)
.
(3.40)
Отношение i угловых скоростей входного и выходного звена называют передаточным отношением (о передаточном отношении зубчатых колес шла речь в лекции 7). Появление большого числа передач связано с тем, что угловая скорость вращения выходного вала двигателя обычно значительно больше, чем скорость вращения входного звена исполнительного механизма. В частности, в электродвигателях скорость вращения ротора обратно пропорциональна числу пар полюсов, следовательно, уменьшение скорости вращения ротора ведет к увеличению массы и габаритов двигателя. Поэтому обычно выбирают небольшой двигатель с большой скоростью вращения ротора и добавляют передаточный механизм, понижающий скорость вращения в i число раз.
Рассмотрим следующие передачи:
-
Ф
 рикционные
– передачи, в которых движение передается
за счет сил трения между звеньями
(frictio
по-латыни – трение). Ведущий шкив 1 (рис.
3.19), вращающийся со скоростью
рикционные
– передачи, в которых движение передается
за счет сил трения между звеньями
(frictio
по-латыни – трение). Ведущий шкив 1 (рис.
3.19), вращающийся со скоростью
 ,
прижимается усилием Р к ведомому шкиву
2. Сила трения, возникающая в кинематической
паре К, приводит во вращение ведомый
шкив 2, который начинает вращаться со
скоростью
,
прижимается усилием Р к ведомому шкиву
2. Сила трения, возникающая в кинематической
паре К, приводит во вращение ведомый
шкив 2, который начинает вращаться со
скоростью
 .
Если в паре К нет проскальзывания, то
есть относительная скорость звеньев
1 и 2 в точке К равна 0, то выполняется
соотношение:
.
Если в паре К нет проскальзывания, то
есть относительная скорость звеньев
1 и 2 в точке К равна 0, то выполняется
соотношение:
![]() (3.41)
(3.41)
Обозначив радиусы шкивов r1 и r2, перепишем (3.41) в виде:
![]() (3.41’)
(3.41’)
Из (3.41’) найдем передаточное отношение i фрикционной передачи:
![]() (3.42)
(3.42)
Точка К – мгновенный центр скоростей в относительном движении. В системе координат, связанной со звеном 1, она описывает траекторию, называемую подвижной центроидой. Очевидно, что эта подвижная центроида является окружностью радиуса r1. Аналогично подвижной центроидой второго звена является окружность радиуса r2. Следовательно, передаточное отношение фрикционной передачи обратно пропорционально отношению радиусов подвижных центроид ведущего и ведомого звеньев. Из определения мгновенного центра скоростей и подвижной центроиды следует, что подвижные центроиды катятся друг по другу без скольжения.
Фрикционные передачи не передают большие усилия, поэтому их можно использовать тогда, когда надо предохранить двигатель от перегрузки, возникшей, например, при заклинивании исполнительного механизма. Поскольку сила трения зависит от коэффициента трения, который, в свою очередь, зависит от наличия смазки, то передаваемый крутящий момент нестабилен.
-
Ременные передачи.
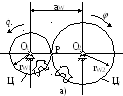
Р еменная
передача состоит из ведущего шкива 1,
ведомого шкива 2 и ремня 3 (рис. 3.20). Для
натяжения ремня используется либо
перемещение опоры одного из шкивов,
либо установка натяжного ролика. Если
в передаче нет проскальзывания, а ремень
– нерастяжимый, то можно получить
соотношение для угловых скоростей
ведущего
еменная
передача состоит из ведущего шкива 1,
ведомого шкива 2 и ремня 3 (рис. 3.20). Для
натяжения ремня используется либо
перемещение опоры одного из шкивов,
либо установка натяжного ролика. Если
в передаче нет проскальзывания, а ремень
– нерастяжимый, то можно получить
соотношение для угловых скоростей
ведущего
![]() и ведомого
и ведомого
![]() шкивов:
шкивов:
![]() .
.
В ременных передачах межосевое расстояние а = О1О2 больше, чем во фрикционных. В передаче, показанной на рис. 3.20, направление вращение у ведущего и ведомого колес совпадает, в отличие от фрикционной передачи, показанной на рис. 3.19.
-
Зубчатые передачи.
Для того, чтобы исключить проскальзывание и увеличить передаваемую мощность, используют зубчатые передачи. Они очень широко применяются в технике; их изучает наука, называемая теорией зубчатых зацеплений.
Для того, чтобы передаточное отношение было постоянным, необходимо, чтобы профили зубьев удовлетворяли некоторым условиям.
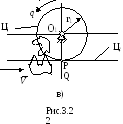
Пусть два звена, вращающихся вокруг осей О1 и О2, образуют в точке К высшую кинематическую пару (рис. 3.21). Очевидно, что относительная скорость должна лежать на касательной - к сопряженным профилям, т.к. в противном случае нормальная составляющая относительной скорости привела бы либо к отрыву звеньев друг от друга, либо к внедрению одного звена в другое. Из этого следует, что мгновенный центр скоростей в относительном движении лежит на нормали n-n, проведенной в точке контакта к сопряженным профилям. В то же время мгновенный центр скоростей должен лежать на прямой О1О2, соединяющей оси вращения звеньев 1 и 2. Следовательно, мгновенным центром скоростей в относительном движении является точка Р, лежащая на пересечении нормали n-n и линии О1О2. В теории зубчатых зацеплений эту точку называют полюсом зацепления.
И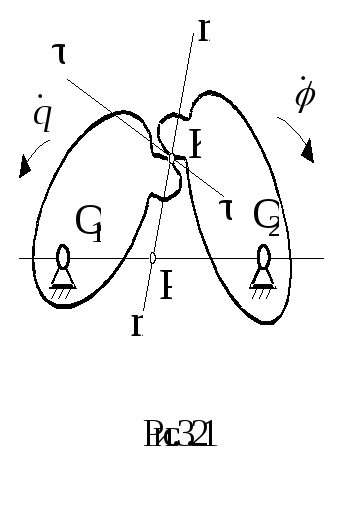 з
определения мгновенного центра скоростей
следует, что относительная скорость в
точке Р равна нулю, т.е. VP1
= VP2.
Следовательно:
з
определения мгновенного центра скоростей
следует, что относительная скорость в
точке Р равна нулю, т.е. VP1
= VP2.
Следовательно:
![]() (3.43)
(3.43)
Отсюда передаточное отношение i12:
![]() (3.44)
(3.44)
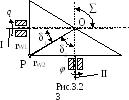
Иными словами, нормаль, проведенная в точке контакта к сопряженным профилям, делит межосевое расстояние в отношении, обратно пропорциональном отношению угловых скоростей. Это – основная теорема зацепления. Для того, чтобы передаточное отношение i12 было постоянным, необходимо, чтобы полюс зацепления занимал постоянное положение. В этом случае центроидами в относительном движении будут являться окружности, которые в теории зубчатых зацеплений называются начальными окружностями. Все размеры, относящиеся к начальным окружностям, помечают индексом w, например: rw1,rw2 – радиусы начальных окружностей (рис. 3.22, а). Радиусу начальной окружности rw пропорциональна длина начальной окружности и, следовательно, число зубьев z, которое может на ней разместиться. Поэтому для передаточного отношения справедливо выражение:
![]() (3.44’)
(3.44’)
Знак «минус», стоящий перед отношением чисел зубьев ведомого и ведущего колеса, показывает, что в передаче внешнего зацепления ведущее и ведомое колеса вращаются в противоположные стороны, а передаточное отношение – отрицательное.
Расстояние между осями вращения зубчатых колес называют межосевым расстоянием и обозначают аw. В случае внешнего зацепления
аw = rw1 + rw2. (3.45)

Учитывая, что rw1 = O1P, rw2 = O2P, из (3.44) и (3.45) получим:
![]() (3.46)
(3.46)
Для того, чтобы уменьшить габариты передачи, используют колеса внутреннего зацепления: одно колесо вставляется внутрь другого (рис. 3.22, б). В этом случае направление вращения ведущего и ведомого колес совпадает, поэтому передаточное отношение – положительное:
![]() .
(3.44”)
.
(3.44”)
Межосевое расстояние равно разности радиусов начальных окружностей:
аw = rw2 - rw1. (3.47)
Тогда радиусы начальных окружностей равны:
![]() (3.48)
(3.48)
Если rw2 , то начальная окружность превращается в начальную прямую, а зубчатое колесо – в зубчатую рейку. В этом случае получают зубчато-реечную передачу (рис. 3.22, в). Поскольку в полюсе зацепления относительная скорость равна 0, то VP1 = VP2, и
![]() (3.49)
(3.49)
Зубчатые колеса используют также и для передачи вращения между валами с пересекающимися осями (I и II на рис. 3.23) – это конические колеса. Чаще всего угол между осями = 900 (такие передачи называют ортогональными), но возможны и другие углы. В передачах с коническими колесами существует мгновенная ось (OP) – геометрическое место точек тел, имеющих в данный момент нулевую относительную скорость. Если мгновенную ось ОР, наклоненную к оси вращения I под углом 1, вращать вокруг оси 1, получится коническая поверхность – подвижная аксоида (поверхность, образованная мгновенной осью в локальной системе координат, связанной со звеном 1 или 2, называют подвижной аксоидой). Аналогично при вращении мгновенной оси ОР вокруг оси II получим коническую поверхность с половиной угла при вершине, равной 2 (вторая подвижная аксоида). Подвижные аксоиды в теории зубчатых зацеплений называются начальными конусами. Зубья колес располагают вблизи начальных конусов, а поверхности вершин и впадин имеют ту же форму, что и начальные конусы.
Поскольку подвижные аксоиды катятся друг по другу без скольжения, то
![]() (3.50)
(3.50)
Отсюда передаточное отношение i12:
![]() (3.51)
(3.51)
Поскольку rw1 = OPsin1, rw2 = OPsin2 , то
![]() (3.52)
(3.52)
В ортогональных передачах:
i12 = ctg 1 = tg 2 . (3.53)
П ри
передаче вращения между валами, оси
которых скрещиваются, не существует
точки или оси, где относительная скорость
была бы равна 0, т.е. нет ни мгновенного
центра скоростей в относительном
движении, ни мгновенной оси. Относительное
движение можно представить как поворот
вокруг некоторой оси и скольжение вдоль
нее. Эта ось называется мгновенной осью
вращения-скольжения или мгновенной
винтовой осью.
Геометрические места мгновенной винтовой
оси на каждом из колес дают винтовые
аксоиды относительного движения. При
постоянном передаточном отношении
мгновенная винтовая ось занимает
постоянное положение в неподвижном
пространстве, а винтовые аксоиды
относительного движения являются
однополостными гиперболоидами вращения
(рис. 3.24). На этом основании зубчатую
передачу со скрещивающимися осями
вращения называют гиперболоидной.
ри
передаче вращения между валами, оси
которых скрещиваются, не существует
точки или оси, где относительная скорость
была бы равна 0, т.е. нет ни мгновенного
центра скоростей в относительном
движении, ни мгновенной оси. Относительное
движение можно представить как поворот
вокруг некоторой оси и скольжение вдоль
нее. Эта ось называется мгновенной осью
вращения-скольжения или мгновенной
винтовой осью.
Геометрические места мгновенной винтовой
оси на каждом из колес дают винтовые
аксоиды относительного движения. При
постоянном передаточном отношении
мгновенная винтовая ось занимает
постоянное положение в неподвижном
пространстве, а винтовые аксоиды
относительного движения являются
однополостными гиперболоидами вращения
(рис. 3.24). На этом основании зубчатую
передачу со скрещивающимися осями
вращения называют гиперболоидной.
Из-за сложности поверхности гиперболоидов зубья располагают не по всей поверхности, а только на некоторой ее части: центральной 1 или периферийной 2. Чем дальше от центра выбрана часть гиперболоида, снабженная зубьями, тем меньше скорость скольжения вдоль оси по отношению к окружной скорости, следовательно, меньше трение и износ.
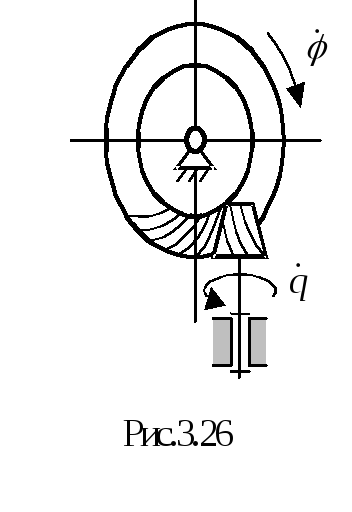
Поскольку нарезание гиперболоидных колес является сложной технологической задачей, то используют следующее упрощение: части 1 гиперболоидов заменяют цилиндрическими поверхностями и получают винтовые зубчатые передачи (рис. 3.25, а); части 2 заменяют коническими поверхностями и получают гипоидные зубчатые передачи (рис. 3.26).
В винтовых механизмах используются косозубые цилиндрические колеса с углами наклона линии зуба по начальным цилиндрам к оси колеса соответственно W1 и W2. Угол между скрещивающимися осями равен сумме:
![]() (3.53)
(3.53)
Если 1 = -2, то = 0, и оси колес оказываются параллельны (рис. 3.25, б).
Поскольку
нормальные составляющие скоростей
точек контакта 1-го и 2-го колеса должны
быть равными, то есть Vn1
= Vn2,
то V1cosW1
= V2cosW2.
Учитывая, что V1
=
![]() ,
а
,
а
![]() ,
где rw1,
rw2
– радиусы начальных цилиндров, получим
выражение для передаточного отношения
винтовой передачи:
,
где rw1,
rw2
– радиусы начальных цилиндров, получим
выражение для передаточного отношения
винтовой передачи:
![]() .
(3.54)
.
(3.54)
Из (3.54) следует, что получение заданного передаточного отношения в винтовой передаче возможно подбором не двух, а четырех параметров: радиусов начальных цилиндров и углов наклона линии зуба по начальным цилиндрам к оси колеса.
Ч астным
случаем гиперболоидной зубчатой передачи
является червячная
передача.
Угол скрещивания осей в большинстве
случаев равен 900.
Передача состоит из червяка 1 и червячного
колеса 2 (рис. 3.27, а). Червяком
называют косозубое зубчатое колесо,
линия зубьев которого делает один или
более оборотов вокруг его оси. Число
зубьев червяка z1
называют числом
заходов (или
числом витков); число z1
чаще всего равно 1, 2, 4. Червячное колесо
нарезают фрезой, представляющей собой
точную копию червяка. Поэтому в червячных
передачах касание витков червяка и
зубьев колеса происходит по линии
(линейный контакт). Для увеличения
соприкосновения ободу червячного колеса
придают форму, при которой колесо
охватывает червяк. Иногда нарезание
червяка производится не на цилиндре, а
на поверхности вращения, образованной
дугой окружности с центром на оси
червяка. Такая поверхность называется
глобоидом, а червяк – глобоидным.
астным
случаем гиперболоидной зубчатой передачи
является червячная
передача.
Угол скрещивания осей в большинстве
случаев равен 900.
Передача состоит из червяка 1 и червячного
колеса 2 (рис. 3.27, а). Червяком
называют косозубое зубчатое колесо,
линия зубьев которого делает один или
более оборотов вокруг его оси. Число
зубьев червяка z1
называют числом
заходов (или
числом витков); число z1
чаще всего равно 1, 2, 4. Червячное колесо
нарезают фрезой, представляющей собой
точную копию червяка. Поэтому в червячных
передачах касание витков червяка и
зубьев колеса происходит по линии
(линейный контакт). Для увеличения
соприкосновения ободу червячного колеса
придают форму, при которой колесо
охватывает червяк. Иногда нарезание
червяка производится не на цилиндре, а
на поверхности вращения, образованной
дугой окружности с центром на оси
червяка. Такая поверхность называется
глобоидом, а червяк – глобоидным.
На рис. 3.27, б показана развертка винтовой линии червяка. Из рисунка видно, что
![]() ,
(3.55)
,
(3.55)
где - угол подъема винтовой линии по цилиндру диаметра d1. Из плана скоростей точки К (рис. 3.27, в) можно составить соотношение между скоростями точки К1, принадлежащей червяку, и точки К2, принадлежащей червячному колесу:
![]() (3.56)
(3.56)
Учитывая, что окружная скорость равна произведению угловой скорости на радиус, получим выражение для передаточного отношения червячной передачи:
![]() .
(3.57)
.
(3.57)
-
Ряды зубчатых колес.
Из (3.44) следует, что передаточное отношение обратно пропорционально отношению радиусов начальных окружностей колес. В инженерной практике по конструктивным соображениям это отношение не превышает 5 … 7. Для получения большего передаточного отношения зубчатые колеса составляют в ряды зубчатых колес (рис. 3.28).
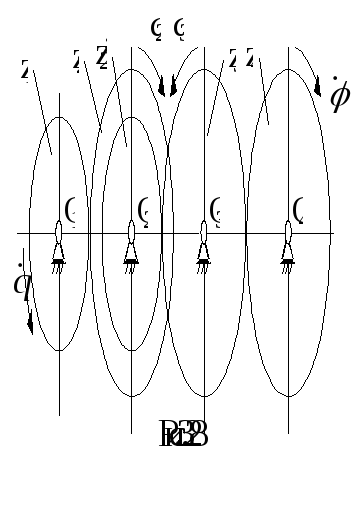
Колесо 1 зацепляется с колесом 2, на валу которого расположено колесо 3. Колесо 3 зацепляется с колесом 4. Передаточное отношение такого ряда равно:
![]() ,
(3.58)
,
(3.58)
то есть передаточное отношение ряда зубчатых колес равно произведению передаточных отношений отдельных ступеней, входящих в ряд. Из (3.58) видно, что радиус одного из зубчатых колес (rw3) не влияет на общее передаточное отношение. Такое колесо называют паразитным. Его используют либо для того, чтобы получить заданное межосевое расстояние О1О4, либо для получения заданного знака передаточного отношения.