

4.5Измерительные преобразователи в сэп
ИП — измерительный преобразователь (датчик) может быть установлен в различных участках кинематической цепи, что определяет точность контроля выходного параметра.
Основные параметры ИП:
Статическая характеристика ИП.
Коэффициент
усиления
![]() ,
где
,
где
![]() ;
коэффициент передачи
;
коэффициент передачи
![]() .
.
Если
единицы измерения входного параметра
![]() и выходного параметра
и выходного параметра
![]() одинаковы — коэффициент масштабирования,
а
одинаковы — коэффициент масштабирования,
а
![]() — коэффициент преобразования, если
и
— разные величины (угловая скорость и
напряжение).
— коэффициент преобразования, если
и
— разные величины (угловая скорость и
напряжение).
Чувствительность – это та минимальная величина, которую учитывает датчик и определяется отношением.
![]() — коэффициент чувствительности.
— коэффициент чувствительности.
Разрешающая
способность — минимальная величина
перемещения, выражающаяся в числе
импульсов.
![]() .
.
Быстрота реакции или переходный процесс, характеризующийся временем tпп (рис. 102).
При этом инерционность учитывается через величину постоянной времени датчика.
Рисунок 102 – Вид переходного процесса в ИП
4.6Разновидности датчиков
Первая группа -
различаются по наличию источника энергии в преобразователе:
- генераторные датчики — тахогенератор, термопара, тензодатчик;
- параметрические — фотоэлектрический преобразователь.
Вторая группа -
различаются по принципу действия.
Резистивные (потенциометрические);
![]()
![]() ,
,
где ![]() — параметр;
— параметр;
![]() — полное сопротивление;
— полное сопротивление;
— ток;
![]() — перемещение.
— перемещение.
Электромагнитные;
![]() ,
,
где ![]() — магнитное сопротивление;
— магнитное сопротивление;
![]() — индуктивность;
— индуктивность;
![]() — индуктивное сопротивление;
— индуктивное сопротивление;
— перемещение.
Фотоэлектрические;
![]() ,
,
где ![]() — мощность оптического сигнала;
— мощность оптического сигнала;
— перемещение.
Третья группа -
различаются характером выходных сигналов:
- с непрерывным сигналом;
- импульсные — импульсов на выходе;
- кодовые — код или шифр.
Четвертая группа -
различаются по привязке нуля шкалы:
- нуль привязан (инкрементные датчики);
- нуль может перемещаться (обычные датчики).
4.6.1Особенности импульсных датчиков
Формирование импульсов осуществляется механическим, электрическим или электронным путем. При этом используются различные способы развертки: электромеханическая, электронная (рис. 103).
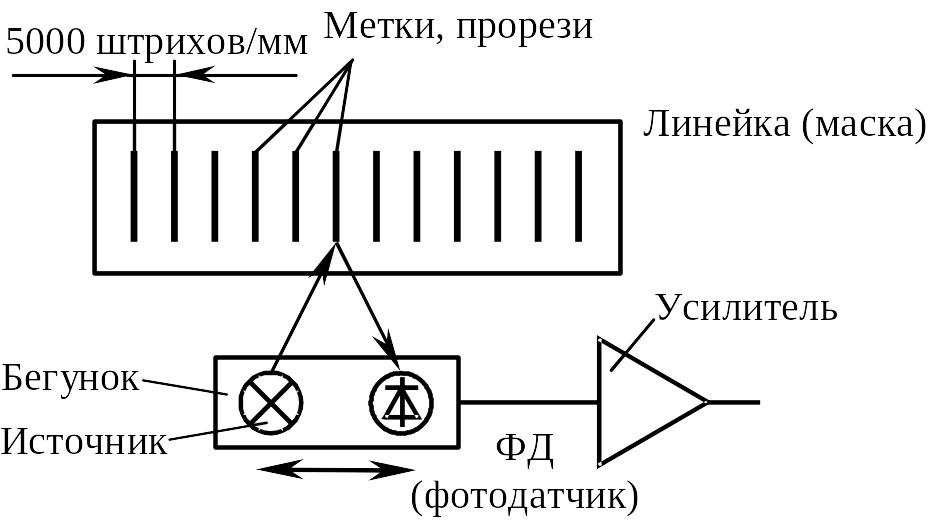
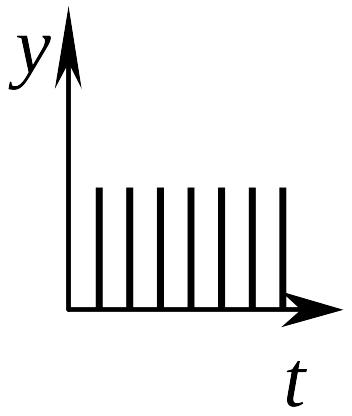
Рисунок 103 – Пример формирования импульсов в датчике
На 1 мм приходится до 5000 штрихов или линий.
На рис. 103 развертка будет электромеханическая. Недостатки: инерционность, низкая точность. Такие датчики (с линейкой) могут определять направления движения исполнительного органа ИО (рис. 104).
Рисунок 104 – Определение направления движения ИО
Пример электронной развертки.
В этом случае используются фотоэлектрические линейки или матрицы (рис. 105).

![]() или 2048 пикселов
или 2048 пикселов
Рисунок 105 – Фотоэлектрическая линейка
Получаем видеосигнал, как показано на рис.106.
Рисунок 105 – Пример получения видеосигнала