

3. Выбор электродвигателя.
Электродвигатель привода машины выбираем из каталога электродвигателей исходя из его номинальной мощности и частоты вращения кривошипа, а также по оптимальному сочетанию основных характеристик двигателя – массе, пусковому моменту, к.п.д. и др.
Из каталога выбираем двигатель со следующими характеристиками:
Тип электродвигателя |
Мощность, кВт |
При номинальной мощности |
|
Маховый
момент ротора,
|
||
Частота
вращения,
|
КПД, % |
|
||||
А480A4У3 |
1.1 |
1420 |
75 |
0,81 |
2 |
0.129 |




4. Синтез зубчатого механизма.
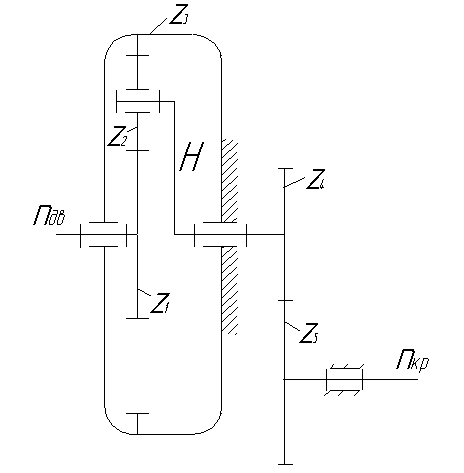
Для снижения частоты вращения электродвигателя до необходимой (равной частоте вращения кривошипа) используется зубчатая передача, состоящая из планетарного механизма и уравнительной пары зубчатых колес.
Общее передаточное отношение зубчатой передачи:

Схема редуктора.
где Uпл – передаточное отношение планетарного механизма,
Uзп – передаточное отношение уравнительной пары зубчатых колес.
Для выполнения условия правильности зацепления выбираем количество зубьев центрального колеса z1=20 .
Число зубьев опорного колеса:

По условию соосности число зубьев сателлита:

Максимальное число сателлитов определяется из условия соседства:
Выбираем K=5.
Полученные условия проверяются на выполнение условия сборки:
 , где П и Ц – целые
числа,
, где П и Ц – целые
числа,
Определим z4 и z5:
z4= 17,
z5=
z4 ,
,
 =
=
z5=
17 3.8606=65.63,
берем z5=
65.
3.8606=65.63,
берем z5=
65.
Погрешность

Для вычисления размеров зубчатых колес определяется их модуль:

где Мкр – крутящий момент на валу зубчатой передачи.
1. Рассчитаем модуль для входного вала:
ŋпер.=0,86 – к.п.д. зубчатой передачи,
ŋдвиг =0,92 – к.п.д. двигателя.



2. Рассчитаем модуль для выходного вала:


Определим диаметры
зубчатых колес:






Диаметр водила
определяется из условия
 .
Полученное
.
Полученное
значение округляется в большую сторону до стандартной величины:

4. Синтез кулачкового механизма.
Основные размеры и профиль кулачка определяются по выходным параметрам, к которым относятся структурная схема кулачкового механизма, законы движения входного и выходного звеньев, фазовые углы (удаления, дальнего стояния, возвращения, ближнего стояния), максимальное перемещения выходного звена.
Исходные данные:
h=49мм;
φф=φв=
φу
=70o;
e=25,962мм;
R0=51.924
мм;

Вычислим основные размеры кулачка для 1-ого положения:




Данные для остальных положений оформим виде таблиц.
Для фазы удаления:
S1=1.413 |
S’1=20.054 |
α1=69.238 |
R1=53.152 |
S2=9.58 |
S’2=60.161 |
α2=65.452 |
R2=60.41 |
S3=24.5 |
S’3=80.214 |
α3=60.492 |
R3=74.16 |
S4=39.42 |
S’4=60.161 |
α4=57.101 |
R4=88.291 |
S5=47.587 |
S’5=20.054 |
α5=55.669 |
R5=96.127 |
S6=49 |
S’6=0 |
α6=55.445 |
R6=97.488 |
Для возвращения:
S1=3.282 |
S’1=31.5 |
α1=68.284 |
R1=54.791 |
S2=12.25 |
S’2=54.56 |
α2=64.406 |
R2=62.832 |
S3=24.5 |
S’3=63 |
α3=60.492 |
R3=73.367 |
S4=36.75 |
S’4=31.5 |
α4=57.625 |
R4=85.742 |
S5=45.718 |
S’5=7.715*10-15 |
α5=55.976 |
R5=94.328 |
S6=49 |
S’6=0 |
α6=55.445 |
R6=97.488 |
Выбираем кулачковый механизм с толкателем.
Центровой профиль кулачка строится по полученным значениям полярного угла и радиуса. С этой целью в масштабе μs проводятся окружности радиусами, равными e, Ro, Rmax. К окружности радиусом e строится касательная – линия движения толкателя y – y.
При соединении точки пересечения y – y с окружностью радиусом R0 и центра вращения О1 получается радиус-вектор R1=R0 (в момент начала фазы удаления). От этого радиус-вектора (в противоположном вращению кулачка направлении) откладываются полярные углы αi, на сторонах этих углов строятся радиус-векторы. Путем соединения концов радиус-векторов строится центровой профиль кулачка.
Для определения действительного профиля кулачка строится кривая, удаленная от центрового профиля на расстояние, равное радиусу ролика. Для этого в нескольких точках центрового профиля строятся окружности радиусом, равным радиусу ролика rрол, а профиль кулачка получается как огибающая построенных окружностей. За величину радиуса ролика выбирается наименьшее значение, полученное из следующих условий:


где
 -
минимальный радиус кривизны центрального
профиля кулачка.
-
минимальный радиус кривизны центрального
профиля кулачка.
 мм
мм
 мм
мм
