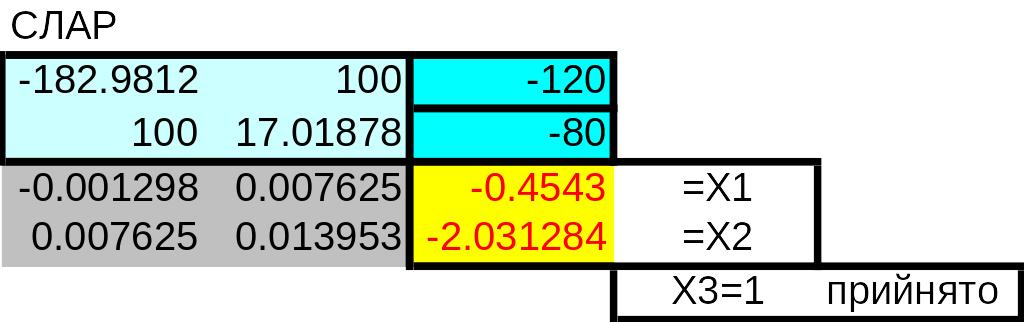
8. Розв’язування слар для визначення елементів власного вектору відповідних другому головному напруженню
Характеристичне рівняння матриці напружень в узагальненій формі запишеться як:
![]() .
.
Ця
система рівнянь є однорідною відносно
елементів власного вектору
![]() .
Систему цих
однорідних
рівнянь перетворюємо у систему
неоднорідних шляхом підстановки замість
.
Систему цих
однорідних
рівнянь перетворюємо у систему
неоднорідних шляхом підстановки замість
![]() одиничного значення (
одиничного значення (![]() ),
тоді система буде неоднорідною системою
2-го порядку відносно
невідомих елементів вектора
),
тоді система буде неоднорідною системою
2-го порядку відносно
невідомих елементів вектора
![]() (
(![]() та
та
![]() ):
):
 маємо
маємо
![]() .
.
Розв’язуємо СЛАР 2-го прядку методом на основі оберненої матриці у MSExcel (МОБР()+МУМНОЖ()) при 382.9918:
Ці
значення є значенннями власного вектора
![]() відповідного
до другого
головного напруження
.
відповідного
до другого
головного напруження
.
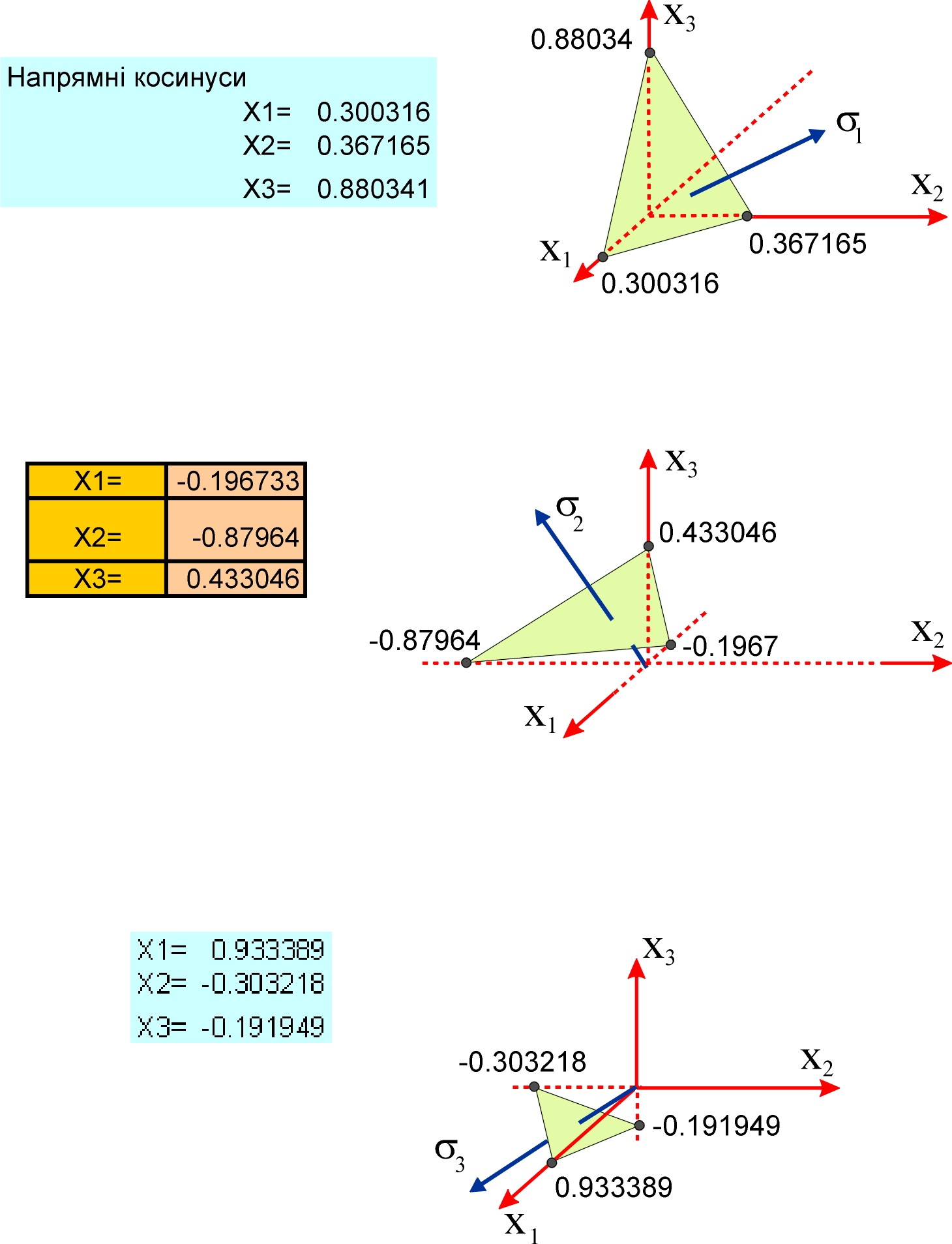
9.Визначення напрямних косинусів орієнтації головних площинок
Кожному головному напруженню відповідають три компоненти власного вектора, причому кожен з них є напрямним косинусом між нормаллю до площинки, на якій діє головне напруження і відповідною віссю координат. Таким чином, для визначення орієнтації трьої головних площинок потрібно знайти девять компонентів власних векторів. Зобразимо їх у вигляді матриці 3-го порядку:
 .
.
Верхній індекс означає нормаль до площинки, на якій діє головне напруження (номер головного напруження), а нижній – номер компонента власного вектора, який відповідає цьому головному напруженню.
За значеннями цих компонентів визначимо напрямні косинуси між нормалями до головних площинок і відповідними осями системи координат. Для цього пронормуємо компоненти власних векторів, поділивши значення кожного власного вектора на довжину (модуль) цього вектора.
Довжини векторів визначимо через їхні координати у прямоугольній системі координат за формулами (для кожного і-го):
![]() ,
,
де i – номер вектора, відповідного головному напруженню у просторі.
![]() –
елементи
власного вектора, відповідного i-му
головному
напруженню.
–
елементи
власного вектора, відповідного i-му
головному
напруженню.
Напрямні косинуси знайдемо із залежностей:
![]() ;
; ![]() ;
; ![]() .
.
Випишемо значення власних векторів, отриманих у п.2 (перший вектор), п.8 (другий вектор), п.3 (третій вектор):
 ;
;
 ;
;

Обчислимо довжини векторів:
а) відповідного першому напруженню
![]() ,
,
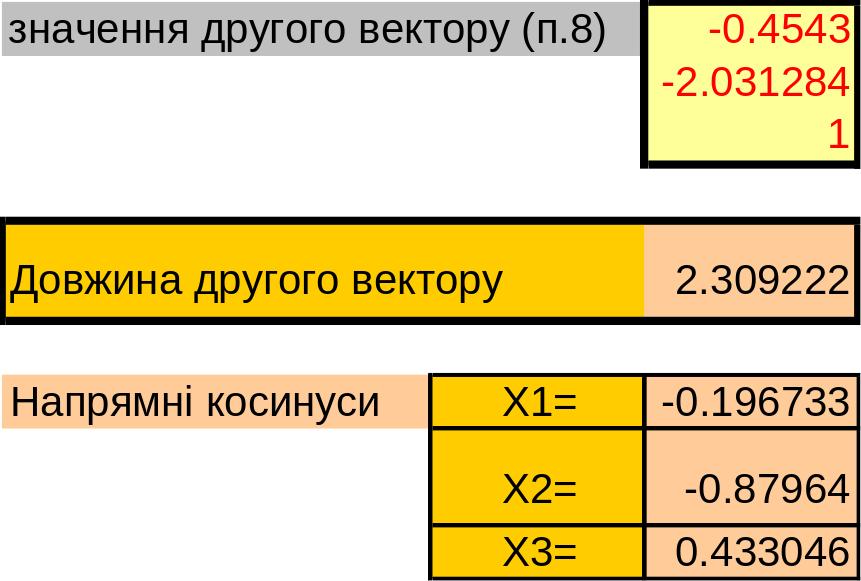
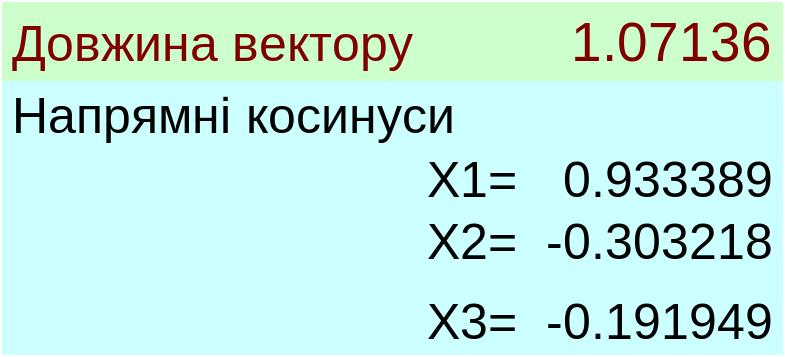
б) відповідного другому напруженню
![]() ,
,
в) відповідного третьому напруженню
![]() .
.
На основі цих довжин обчислюємо напрямні косинуси для опису координат положення головних площинок:
а) головна площинка до нормалі якої діє перше головне напруження :
![]()
![]()
![]()
b)
головна площинка до нормалі якої діє
друге
головне напруження
![]() :
:
![]()
![]()
![]()
Наведемо фрагмент обчислення довжини та напрямних косинусів для першого вектора у MSExcel:
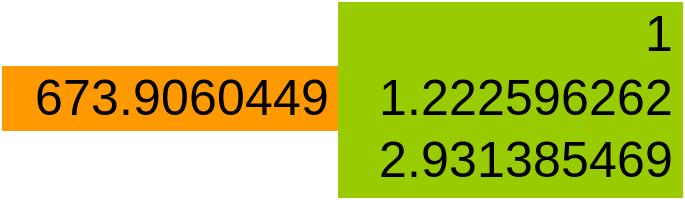

Наведемо фрагмент обчислення довжини та напрямних косинусів для другого вектора у MSExcel:
Наведемо фрагмент обчислення довжини та напрямних косинусів для третього вектора у MSExcel:
Перевірка правильності визначення елементів напрямних косинусів за співвідношеннями аналітичної геометрії:
![]() ,
,
![]() ,
,
![]() – перевірка
для всіх площинок виконується.
– перевірка
для всіх площинок виконується.
10. Графічне представлення результатів – орієнтація головних площинок у просторі напружень точки деформівного пружного тіла
Зведемо
значення елементів визначених власних
векторів, відповідних до
![]()
![]() (
(![]() ),
взятих за результатами п.9:
),
взятих за результатами п.9: