

3.5.3 Погрешность от гистерезиса
В механических
преобразователях погрешность от
гистерезиса создают отклонения
присоединения
![]() в
шарнирах вращающихся звеньев. Рассмотрим
расчёт погрешности геометрическим
способом на
примере синусного двуплечего рычажного
преобразователя.
в
шарнирах вращающихся звеньев. Рассмотрим
расчёт погрешности геометрическим
способом на
примере синусного двуплечего рычажного
преобразователя.
Пример 3.8. Синусный рычажный преобразователь
Требуется определить (рис. 3.33) влияние зазора z в шарнире, образованном отверстием в корпусе 1 и цапфой 2 синусного рычага, на погрешность от гистерезиса преобразователя.
Зазор в шарнире
z,
необходимый для вращения рычага, приводит
к образованию отклонения присоединения
,
при котором ось цапфы
![]() не
совпадает с осью отверстия в корпусе
не
совпадает с осью отверстия в корпусе
![]() :
:
![]() (3.83)
(3.83)
Причинами
возникновения погрешности от гистерезиса
является зазор в шарнире и внешнее
трение скольжения между сферами рычага
и опорными плоскостями входного и
выходного звеньев преобразователя. При
реверсировании движения входного звена,
т.е. при переходе от прямого хода (![]() )
к обратному (
)
к обратному (![]() )
и наоборот, силы трения меняют своё
направление на противоположное, вызывая
изменение положения подвижных звеньев
преобразователя.
)
и наоборот, силы трения меняют своё
направление на противоположное, вызывая
изменение положения подвижных звеньев
преобразователя.
Силы трения
![]() и
и
![]() ,
направленные против направления
относительного движения подвижного
звена, отклоняют внешние действующие
силы
,
направленные против направления
относительного движения подвижного
звена, отклоняют внешние действующие
силы
![]() и
и
![]() на
углы трения
на
углы трения
![]() .
При реверсировании движения изменение
направления действующих сил составляет
угол
.
При реверсировании движения изменение
направления действующих сил составляет
угол
![]() .
Это изменение (без учёта момента трения
качения в шарнире) приводит к изменению
направления реакции R
в шарнире на угол
.
Изменение направления реакции R
заставляет перемещаться центр цапфы
подвижного рычага из положения
в
положение
.
Это изменение (без учёта момента трения
качения в шарнире) приводит к изменению
направления реакции R
в шарнире на угол
.
Изменение направления реакции R
заставляет перемещаться центр цапфы
подвижного рычага из положения
в
положение
![]() на
длину дуги f
:
на
длину дуги f
:
![]() (3.84)
(3.84)
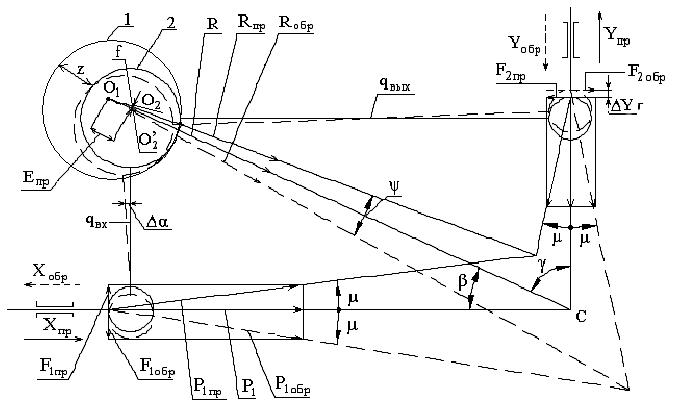
1 – корпус; 2 – цапфа рычага
Рис. 3.33. К расчёту погрешности от гистерезиса синусного двуплечего рычажного преобразователя
Перемещение f
центра цапфы вызывает поворот и
поступательное смещение подвижного
звена, которое создаёт погрешность от
гистерезиса
![]() .
.
Для расчёта погрешности необходимо спроектировать смещение f на линии движений входного и выходного звеньев. В рассматриваемом примере можно считать, что смещение f центра цапфы направлено перпендикулярно линии С, которая показывает направление реакции R в шарнире без учёта сил трения.
Тогда
![]() (3.85)
(3.85)
где
![]() – углы между направлением
С
и линиями движения входного и выходного
звеньев.
– углы между направлением
С
и линиями движения входного и выходного
звеньев.
Проекция
![]() вызовет
поворот подвижного звена – рычага
вызовет
поворот подвижного звена – рычага
![]() , (3.86)
, (3.86)
где
![]() –
длина входного плеча синусного рычага,
–
длина входного плеча синусного рычага,
а проекция
![]() – поступательное
смещение выходного звена
– поступательное
смещение выходного звена
![]() (3.87)
(3.87)
Поворот рычага на угол ∆α создаёт вторую составляющую погрешности от гистерезиса по выходу
![]() (3.88)
(3.88)
где
![]() –
длина выходного плеча синусного рычага.
–
длина выходного плеча синусного рычага.
Погрешность от гистерезиса может быть рассчитана по формуле
![]() .
(3.89)
.
(3.89)
Поскольку отношение длин плеч рычагов представляет собой чувствительность
![]() ,
,
то окончательно
![]() .
(3.90)
.
(3.90)
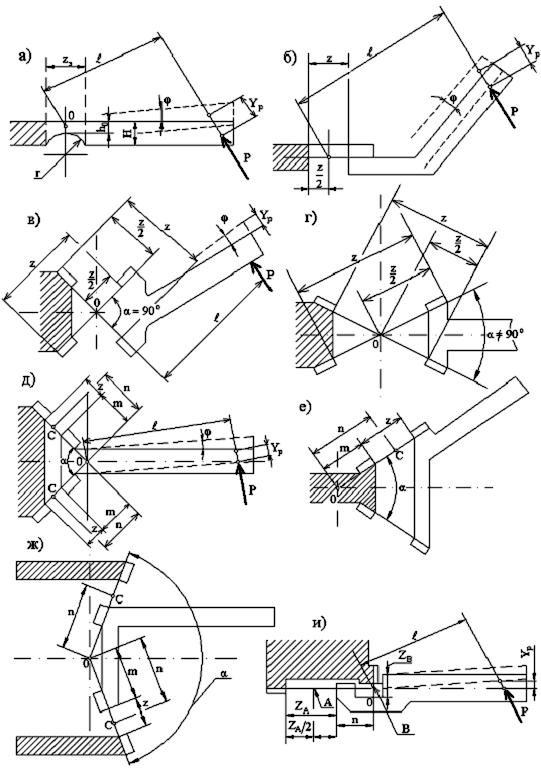
а) интегральный шарнир; б) шарнир на одиночной плоской пружине; в), г) центрально-симметричные крестовые шарниры из плоских пружин; д – ж) крестовые шарниры из плоских пружин с вынесенным центром; и)Т - образный шарнир из плоских пружин А и В
Рис. 3.34. Упругие шарниры для вращательного движения звеньев преобразователей (принципиальные схемы)
Таблица 3.8
Упругие шарниры и преобразователи. Формулы для расчёта параметров
Тип шарнира |
Формула силовой
жёсткости
|
Формула предельно
допустимого перемещения
|
||
1 |
2 |
3 |
||
Интегральный шарнир (рис. 3.34 а) |
где
для стали
|
для стали
|
||
Шарнир на одиночной плоской пружине (рис. 3.34 б) |
для стали
|
для стали
|
||
Центрально-симметричный крестовый шарнир из двух плоских пружинных ветвей (рис. 3.34 в, г)
|
для стали
|
для стали
|
||
Крестовый шарнир из двух плоскопружинных ветвей с вынесенным центром (рис. 3.34 д-ж)
|
где
для стали
|
для стали
|
||
Продолжение табл. 3.8 |
||||
1 |
2 |
3 |
||
Т-образный шарнир
из двух плоскопружинных ветвей А и В
при
(рис. 3.34 и) |
для стали
|
В качестве
предельно допустимого принимается
наименьшее значение
для стали
|
||
Плоскопружинный параллелограмм без накладок (рис. 3.36 а-в) |
для стали при
|
для стали при
|
||
Плоскопружинный параллелограмм с накладками (рис. 3.36 г) |
где
для стали
|
для стали
при
|
||
Окончание табл. 3.8 |
||||
1 |
2 |
3 |
||
Интегральный четырёхзвенный параллелограмм (рис. 3.36 д, е) |
где для стали
|
|
||
Основные обозначения: h – толщина пружины (пружин), мм;
b – ширина пружины, мм;
z – свободная длина пружины, мм;
S – общая длина пружины с накладками; t – длина накладок; r – радиус упругой перемычки;
– расчётное плечо рычага, мм;
Е – модуль
упругости материала, МПа (для стали
|
||||
 для
стали
для
стали
Суммирование производится с учётом знаков перед составляющими по их влиянию на выходной сигнал. При переходе от прямого хода (сплошные линии) к обратному (пунктирные линии) погрешность от гистерезиса составит
![]() (3.91)
(3.91)
Анализ формул показывает, что погрешность от гистерезиса зависит от зазора в шарнире, чувствительности преобразователя, трения скольжения и не зависит от значения входного сигнала. Погрешность от гистерезиса является постоянной систематической погрешностью преобразователя, но её знак зависит от направлений движений входного звена преобразователя при настройке прибора и при измерении.
С целью уменьшения погрешности от гистерезиса в измерительных преобразователях высокой точности применяются беззазорные упругие шарниры с внутренним трением для вращательного движения звеньев (рис. 3.34) как интегральные (а), в которых роль шарнира выполняет тонкая перемычка в теле звена, так и сборные – из комплекта плоских пружин и накладок (б-и). Формулы для расчёта параметров шарниров [51] приведены в табл. 3.8.