

5.1.6. Элементы транзисторной схемотехники
Кроме рассмотренных выше типовых усилительных каскадов с ОБ, ОЭ и ОК в практике широко используются так называемые композиционные схемы, состоящие из двух и более БТ, предназначенные для совершенствования каких-либо параметров БТ и схем на их основе. Некоторые примеры подобных схем представлены в данной главе.
Составной БТ (пара Дарлингтона). Составной БТ (рис. 5.14) содержит два БТ, коллекторы которых соединены параллельно, а эмиттер первого БТ соединен с базой второго. Базой составного БТ служит база первого транзистора, эмиттером – эмиттер второго. Решим совместно следующую систему уравнений:
Iк = Iк1 + Iк2; Iэ = Iэ2; Iб = Iб1;
Iк1 = 1. Iб1; Iк2 = 2. Iб2; Iк = . Iб,
Исключив все промежуточные переменные в виде токов отдельных БТ. В результате получим
Iк = Iб = (1 + 2 + 12) Iб 12 Iб. (5.13)
Таким образом, составной БТ позволяет существенно увеличить коэффициент усиления по току. Как правило, второй БТ в паре берется более мощным, но с меньшим коэффициентом усиления, чем у первого. Реально достижимые значения коэффициента усиления по току составляют 500-2000, что позволяет непосредственно управлять мощной нагрузкой. В интегральной схемотехнике часто используется комплементарная пара Дарлингтона, в которой первый БТ берется p-n-p типа, а второй – n-p-n. Таким образом, получается мощный p-n-p БТ с высоким коэффициентом усиления.
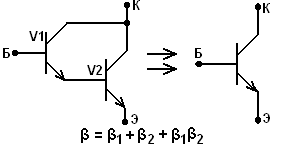
Рис. 5.14. Составной БТ
Зеркало тока. Схема зеркала (отражателя) тока дана на рис. 5.15. Основное назначение зеркала тока – передать значение тока из одной цепи в другую с максимальной точностью. Работа зеркала тока основана на выполнении равенства U1 = U2. При идентичности параметров БТ имеем
U1 = t Ln(I1/I0), U2 = t Ln(I2/I0),
где t – температурный потенциал; I0 – тепловой ток перехода. Откуда I1 = I2, т.е. коэффициент передачи тока равен 1.
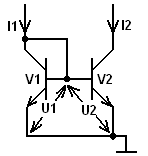
Рис. 5.15. Отражатель тока
Каскод. Под каскодом понимается схема, в которой два БТ соединены последовательно, так что через них протекает один и тот же ток (рис. 5.16). Такое соединение можно рассматривать как вариант составного БТ, коэффициент передачи тока эмиттера которого = 1 2. Не давая выигрыша по коэффициенту усиления, каскод имеет важное преимущество перед простейшим усилителем с ОЭ. Это преимущество состоит в отсутствии паразитной связи через барьерные емкости переходов между выходом и входом. Таким образом, достигается минимизация эффекта Миллера и предотвращается самовозбуждение усилителя на высоких частотах. Благодаря такой особенности каскод находит широкое применение в резонансных усилителях устройств приема радиосигналов.

Рис. 5.16. Принципиальная схема каскода
Дифференциальный усилитель (ДУ). Схема ДУ показана на рис. 5.17. Он состоит из двух симметричных плеч, каждое из которых содержит БТ и резистор. В общей эмиттерной цепи действует источник тока. Выходным напряжением является разность коллекторных потенциалов, а входным – разность базовых потенциалов. В основе ДУ лежит идеальная симметрия его плеч, т.е. идентичность параметров БТ и резисторов. При этом в отсутствие сигнала токи и коллекторные потенциалы будут одинаковы, а выходное напряжение будет равно нулю. Нулевое значение выходного напряжения сохраняется при одновременном и одинаковом изменении токов в обоих плечах, какими бы причинами такое изменение не вызывалось. Если на базы БТ подать одинаковые напряжения относительно общего провода (такие напряжения называются синфазными), то выходное напряжение идеального ДУ не изменится.
Если на базы БТ подать одинаковые по абсолютной величине напряжения, но разные по знаку (такие напряжения называются дифференциальными), то один из БТ откроется на некоторую величину, а другой на такую же величину закроется.
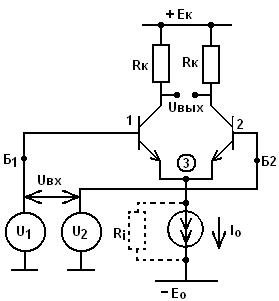
Рис. 5.17. Дифференциальный усилитель на БТ
В результате появится выходное напряжение, которое и является полезным выходным сигналом: Uвых = dUк1 – dUк2. Основными параметрами ДУ являются: а) коэффициент усиления для дифференциального сигнала K0 Rк/rэ; б) коэффициент подавления синфазной составляющей Мс = 20Lg(Kc/K0), где Kc = 0,5Rк/Ri – коэффициент передачи синфазного сигнала (Ri – выходное сопротивление источника тока питания ДУ); в) входное сопротивление для дифференциального сигнала R0 2( + 1) rэ; г) входное сопротивление для синфазного сигнала Rс = ( + 1)Ri. Существует также ряд точностных показателей, из которых важнейшими являются смещение и дрейф нуля. Смещение нуля есть появление на выходе ДУ напряжения при отсутствии входного сигнала. Дрейфом нуля называются температурно-временные изменения смещения нуля. Основная причина смещения и дрейфа нуля – неидентичность плеч ДУ. Типовые значения смещения и дрейфа нуля для интегральных ДУ составляют единицы милливольт и десятки микровольт на один градус Цельсия соответственно. В настоящее время ДУ служит основой построения большого числа аналоговых интегральных микросхем различного назначения.