

Основные требования к оформлению работы
Пояснительная записка должна быть выполнена на бумаге формата А4 по ГОСТ 2.301-68 (графики и схемы можно выполнить на формате А3), в которой отражаются:
все проведённые расчёты;
принципиальные и структурные схемы электропривода, выполненные в соответствии с ЕСКД;
графики переходных процессов;
список использованных источников.
Выбор того или иного типа преобразователя, электродвигателя и т.д. должен быть обоснован.
Вариант 3, задание 7
-
№
Максимальная нагрузка
Вид движения механизма
Абсолютная погрешность слежения, не более
Максимальная скорость изменения задающего сигнала
Минимальная скорость изменения задающего сигнала
Масса механизма
9
3000 Н
Поступ.
0,1 мм.
0,05 м/с
0,005 м/с
200 кг
Исследование переходного процесса произвести при ступенчатом управляющем воздействии. Датчики положения механизма выбрать, исходя из требуемой точности. В расчётах принять КПД редуктора 20 %..
Введение
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя линейные и нелинейные элементы, обеспечивающие в своём взаимодействии разнообразные статические и динамические характеристики. Приобретение навыков проектирования, расчёта и анализа подобных систем имеет большое значение при подготовке специалистов в области автоматизации и механизации современного производства.
Электроприводом называется электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую энергию вращательного, либо поступательного движения и включающее электромеханический преобразователь (двигатель) и устройство управления двигателем.
Современные электроприводы металлорежущих станков являются основным звеном автоматизированных систем управления технологическим процессом. Механическая энергия, необходимая для создания относительного перемещения инструмента и заготовки, в основном поступает от электрического двигателя – силовой части электропривода. Задающие и информационные системы в технологическом процессе проходят через информационную часть системы управления электроприводом.
Свойства автоматизированного электропривода определяют важнейшие показатели металлорежущих станков, а также качество и эффективность технологического процесса.
1 Функциональная схема сар положения
Упрощённая функциональная схема САР положения приведена на рисунке 1:
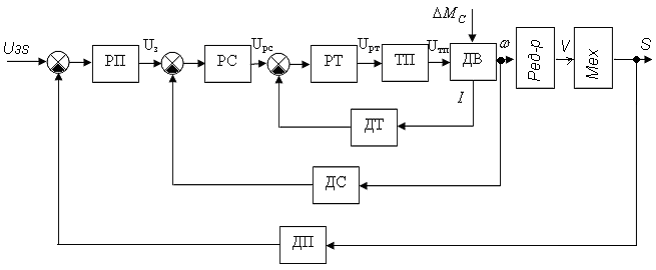
Рис 1. Функциональная схема САР
На рисунке:
РП – регулятор положения
ДП – датчик положения
РС –регулятор скорости
ДС – датчик скорости (тахогенератор)
ДТ – датчик тока
РТ – регулятор тока
ТП – тиристорный преобразователь
Редуктор
Механизм
2. Выбор электродвигателя и преобразователя энергии:
Согласно поставленному заданию, механизм движется поступательно, следовательно, необходимо проектировать привод подачи. Для механизмов подачи характерно, что их механическая характеристика не зависит от скорости и имеет следующий вид:

Такая механическая характеристика называется абсолютно мягкой (=0), ей обладает двигатель постоянного тока при питании от источника тока или при работе в замкнутой системе электропривода в режиме стабилизации тока якоря.
Следовательно, для проектируемого электропривода используем двигатель постоянного тока.
Для данного типа двигателя, т.к. Мс не зависит от скорости, выражение для расчета мощности имеет следующий вид:
Рдв Мс.мax*wмax/ред;
Где ред - КПД редуктора;
wмax - максимальная частота вращения;
Мс.мax = Fсмax* vмax/ (wмax*ред);
Где Fсмax - максимальная нагрузка;
vмax - максимальная скорость изменения задающего сигнала.
При подстановке всех значений получаем, что Рдв 750 Вт.
С учетом кратковременного режима работы, получаем:
Рдв н = Рдв/кд;
Где кд = 2-2,5.
Тогда Рдв н 300 Вт.
С учетом этого выбираем двигатель 2ПА со следующими параметрами:
-
Наименование параметра
Значение
Частота вращения, n, об/мин
2240
Мощность номинальная Рн, Вт
530
Ток номинальный Iн , А
3.09
Момент номинальный Мн , Н м
2,26
КПД, %
73
Частота вращения мах nmax,, об/мин
4000
Момент инерции, кг*м^2
0,005
Число пар полюсов, 2p
4
Сопротивление якоря, Rя, Ом
4,26
Сопротивление дополнительной обмотки , Rд, Ом
2,84
Индуктивность якоря, Lя, мГн
108
Проверку двигателя проведём по методу эквивалентных величин:
Мдв ном >= Мэкв, где
Мэкв – эквивалентный момент
М дв ном – номинальный момент двигателя
Величину эквивалентного момента высчитывают по формуле:
 , где
, где
Мп – пусковой момент
Мт – момент торможения
М*мах – максимальный приведённый момент
М*мин – минимальный приведённый момент
tп – время пуска
tт – время торможения
![]() -
коэффициент, учитывающий условия
охлаждения
-
коэффициент, учитывающий условия
охлаждения
![]() -
коэффициент, учитывающий условия
охлаждения во время паузы
-
коэффициент, учитывающий условия
охлаждения во время паузы
Для
данного типа двигателя примем
![]()
Коэффициент
![]() можно вычислить по формуле:
можно вычислить по формуле:
![]() ,
получим
,
получим
![]() =0.975
=0.975
Расчёт моментов пуска и торможения произведём по формулам:
Мп = -Мт = 4*Мном, получаем
Мп = 2.26*4 = 9.04 Н*м
Мт = -9.04 Н*м
Максимальный приведённый момент равен:
М*мах = Fмахсопр/(I ред*КПДред), где
I ред – передаточное отношение редуктора
I ред = w двиг / V мех, где
V мех – скорость перемещения механизма
w двиг – скорость вращения двигателя
W двиг = 2*П*n / 60 = 2*3.14*2240 / 60 = 234.5 рад/с
I ред = 234.5/0.05 = 4690
Тогда М*мах = 1000/(4690*0.2) = 1.066 Н*м
Минимальный приведённый момент равен
М*мин = 0.1*М*мах
М*мин = 0.1*1.066 = 0.1066 Н*м
Время пуска и торможения вычислим по формулам:
 ,
где
,
где
w дв – скорость вращения вала двигателя
J* - приведённый суммарный момент инерции
J* = Jдв+Jред+Jмех/iред^2, где
Jдв – момент инерции ротора двигателя
Jред – момент инерции редуктора
Jред = 0.2*Jдв = 0.001 кг*м^2
Тогда:
J* = 0.005 + 0.001 + 50/4690^2 = 0.006 кг*м^2
Тогда времена пуска и торможения:
tn = 0.176 с
tт = 0.157 с
Режим работы механизма повторно-кратковременный, нагрузочная диаграмма выглядит следующим образом:

Рис. Нагрузочная диаграмма механизма
Выберем режим работы механизма повторно-кратковременный. Относительный коэффициент продолжительности цикла примем 0.8. Минимальное время цикла примем 30 секунд.
Относительный коэффициент продолжительности цикла:
 ,
,
Откуда tp=24 с – время рабочего периода
Тогда tр1 = tр2 = (tр – tn - tm)/2 = (24-0.176-0.157)/2 = 11.83 с
Время паузы:
to = tцикла – tраб = 30 – 24 = 6 с
Произведём расчёт эквивалентного момента:
 Н*м
Н*м
2.26 > 0.995, значит, двигатель выбран правильно.
Нагрузочная диаграмма двигателя приведена на рисунке.

Рис. Нагрузочная диаграмма двигателя