6 Расчёт и выбор элементов силовой схемы электро - привода, защиты и сигнализации, составление её перечня.
Выбор автоматического воздушного выключателя
Автоматические выключатели (автоматы) осуществляют проведение тока в нормальном режиме и отключение тока при коротких замыканиях, перегрузках и недопустимых снижениях напряжения.
![]() ,
,
где:
![]() – номинальный ток теплового расцепителя
автомата,
– номинальный ток теплового расцепителя
автомата,
![]() –расчётный ток
цепи.
–расчётный ток
цепи.
![]() А;
А;
При затяжных пусках одного из двигателей:
![]() ;
;
![]() А;
А;
При установке автоматического выключателя в закрытом шкафу:
![]() ;
;
![]() А.
А.
Выбираем: А3722Б U = 380 В, IВЫКЛ = 250 А, IЭЛ.Р = 250 А, [2, стр.172].
Выбор теплового реле
Тепловое реле предназначено для защиты асинхронного электродвигателя от недопустимого нагрева при длительных перегрузках.
![]() ;
;
где:
![]() – номинальный
ток нагревательных элементов теплового
реле.
– номинальный
ток нагревательных элементов теплового
реле.
![]() А;
А;
![]() ;
;
где:
![]() – ток срабатывания нагревательных
элементов теплового реле.
– ток срабатывания нагревательных
элементов теплового реле.
![]() А.
А.
Выбираем: РТЛ-3200 IН.РАСЦ = (145÷200) А, РПОЛ = 16 Вт, Р380 = 100 кВт.
Выбор контактора
Выбираем: контактор КТ6032 U = 380 В, Iн = 250 A.
Выбор магнитных пускателей
Электромагнитные пускатели предназначены для дистанционного пуска непосредственным подключением к сети и остановки трёхфазных асинхронных электродвигателей с короткозамкнутым ротором.
![]() ,
,
где:
![]() – номинальный
ток главных контактов.
– номинальный
ток главных контактов.
![]() А;
А;
![]() ,
,
где:
![]() – предельно включаемый и отключаемый
ток,
– предельно включаемый и отключаемый
ток,
![]() –пусковой ток
электродвигателя.
–пусковой ток
электродвигателя.
![]() А;
А;
Выбираем: Пускатели ПАE600 Рн = 75 кВт, Iн = 146 A , Iпред = 1500 A, Sн = 38 Bт.
Выбор трансформаторов
– для цепи управления и сигнализации:
ОСМ-0,16 – 380/110/24: SТР=160 Вт, U1 = 380 В, U2 = 110 В, U3 = 24 В [1, стр.20].
– для динамического торможения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Выбираем трансформатор серии ТБС2-2,5 РН = 2500 Bт, РВО = 2250 Вт [1,стр.27].
Выбор плавких предохранителей
Предохранители предназначены для защиты главных цепей электродвигателей небольшой мощности, а также цепей управления от токов коротких замыканий и недопустимых перегрузок.
Плавкая вставка предохранителя, для защиты цепей трансформатора для динамического торможения:
![]() ,
,
где:
![]() – номинальный ток плавкой вставки,
– номинальный ток плавкой вставки,
![]() –номинальный ток
первичной обмотки трансформатора,
–номинальный ток
первичной обмотки трансформатора,
![]() А;
А;
![]() А;
А;
Выбираем: ПРС – 20 – П: Iпл.вст = 10 А [2, стр.16].
Плавкая вставка предохранителя, для защиты цепей управления:
![]() ,
,
![]() А;
А;
![]() А;
А;
Выбираем: ПРС – 6 – П: Iпл.вст = 1 А [2, стр.16].
Выбор диодного моста
Диодный мост с использованием силовых вентилей (диодов) Д161-320
Iн = 320 А. (с использованием воздушного охлаждения) [2, стр.15]
Кнопки управления
ПКЕ-1 (стоп, вперёд, назад) [1,стр.116].
Реле времени
РВ03 Х4, U = 110 В, выдержка времени в сети 0,15 ÷ 20 с.
Световая сигнализация
Для сигнализации местного освещения выбираем лампы накаливания:
HL 6: ЛН – 40/24, Р = 40 Вт, U = 24 В.
Для сигнализации цепей управления и аварийной сигнализации выбираем лампы накаливания: [1, стр.204].
HL1 – HL5: АЕР1211У1, U = 24 В.
7 Расчёт и построение естественных механических и электромеханических характеристик ад Расчет механических характеристик ад
Построение механической характеристики по Г-образной схеме замещения.
Параметры схемы замещения двигателя представлены в таблице 2. Используя их, можно рассчитать механическую характеристику АД по формуле
 ,
,
где:
![]() – число фаз обмотки статора АД
– число фаз обмотки статора АД
![]() –фазное напряжение
обмотки статора, В
–фазное напряжение
обмотки статора, В
![]() –активные
сопротивления обмоток статора и ротора,
Ом
–активные
сопротивления обмоток статора и ротора,
Ом
![]() –индуктивные
сопротивления обмоток статора и ротора,
Ом
–индуктивные
сопротивления обмоток статора и ротора,
Ом
Значения
параметров схемы замещения в таблице
даны в относительных единицах и поэтому
должны быть пересчитаны через фазные
номинальные величины
![]() и тока
и тока![]() по формулам:
по формулам:
![]()
![]()
Найдем значения активных и индуктивных сопротивлений обмоток статора и ротора:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Задаваясь значениями
скольжения S,
можно определить угловые скорости
ротора
![]() и моментыМ
двигателя, величины которых заносят в
таблицу 7.1.
и моментыМ
двигателя, величины которых заносят в
таблицу 7.1.
Таблица 7.1 – Расчетные параметры механической характеристики
|
|
1 |
10-8 |
0,005 |
0,01 |
0,012 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,08 |
|
|
2 |
4∙10-5 |
196,7 |
381,3 |
450,8 |
699,8 |
939,8 |
1103 |
1203 |
1253 |
1261 |
|
|
3 |
156,99 |
156,2 |
155,4 |
155,12 |
153,9 |
152,3 |
150,7 |
149,2 |
147,6 |
144,4 |
|
|
4 |
|
|
|
6,7% |
|
|
|
|
|
|
Продолжение таблицы 7.1
|
1 |
0,095 |
0,11 |
0,15 |
0,2 |
0,3 |
0,45 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
2 |
1222 |
1167 |
1005 |
832,8 |
604,5 |
422,1 |
322,8 |
278,8 |
245,2 |
218,9 |
197,6 |
|
3 |
142,1 |
139,7 |
133,5 |
125,6 |
109,9 |
86,35 |
62,8 |
47,1 |
31,4 |
15,7 |
0 |
|
4 |
9,8% |
|
|
|
|
|
|
|
|
|
65,9% |
Угловая скорость
ротора
![]() определяется по формуле
определяется по формуле
![]() ,
,
при
![]()
![]()
![]() ,
,
при
![]()
![]()
![]() ,
,
при
![]()
![]()
![]() ,
,
Определим значения момента двигателя:
при
![]()
![]()
![]()
![]()
при
![]()
![]()
![]()
![]()
при
![]()
![]()
![]()
![]()
Оценим погрешность
расчета момента
![]() по
формуле
по
формуле
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Удовлетворительным
расчет по точности считается тогда,
когда
![]() .
Таким образом, получили, что максимальная
погрешность получается при пусковом
моменте.
.
Таким образом, получили, что максимальная
погрешность получается при пусковом
моменте.
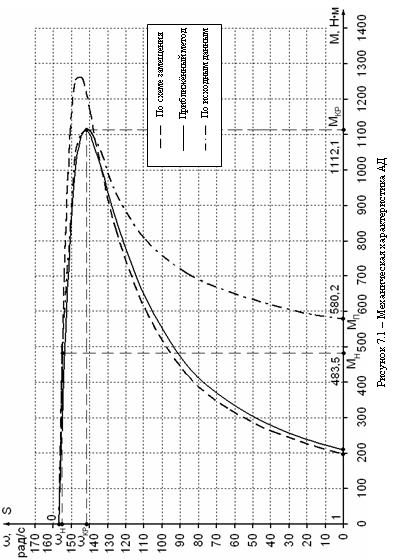
Графическое
изображение механической характеристики
строится в виде зависимостей
![]() или
или![]() ,
которые могут быть совмещены на одном
графике, представленном на рисунке 7.1.
,
которые могут быть совмещены на одном
графике, представленном на рисунке 7.1.
На этом графике обозначаются также точки, соответствующие паспортным параметрам механической характеристики:
номинальному
моменту
![]()
критическому
(максимальному) моменту
![]() ;
;
пусковому
(начальному) моменту
![]() ;
;
минимальному
моменту
![]()
где
![]() – относительный минимальный момент.
– относительный минимальный момент.
Это позволяет оценить погрешность расчета построения механической характеристики по Г-образной схеме замещения.
Построение механической характеристики по приближенной формуле.
На практике широко применяется приближенное аналитическое выражение механической характеристики, называемое формулой Клосса:
Используя
паспортные значения параметров
![]() и
и
![]() для выбранного двигателя, можно рассчитать
величины
для выбранного двигателя, можно рассчитать
величины![]() и
и![]() .
Расчетные параметры заносятся в таблицу,
аналогичную таблице 7.1. График механической
характеристики по приближенной формуле
может быть совмещен с графиком, построенным
по Г-образной схеме замещения (рисунок
7.1).
.
Расчетные параметры заносятся в таблицу,
аналогичную таблице 7.1. График механической
характеристики по приближенной формуле
может быть совмещен с графиком, построенным
по Г-образной схеме замещения (рисунок
7.1).
Таблица 7.2 – Расчетные параметры механической характеристики
|
|
1 |
10-8 |
0,005 |
0,01 |
0,012 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,08 |
|
|
2 |
2,3∙10-5 |
116,8 |
231,6 |
276,6 |
448,5 |
638,8 |
795,6 |
916,9 |
1004 |
1096 |
|
|
3 |
156,99 |
156,2 |
155,4 |
155,12 |
153,9 |
152,3 |
150,7 |
149,2 |
147,6 |
144,4 |
|
|
4 |
|
|
|
42,8% |
|
|
|
|
|
|
Продолжение таблицы 7.2
|
1 |
0,095 |
0,11 |
0,15 |
0,2 |
0,3 |
0,45 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|
2 |
1112,1 |
1100 |
1006 |
862,2 |
640,2 |
449,6 |
343,6 |
296,4 |
260,5 |
232,2 |
209,4 |
|
3 |
142,1 |
139,7 |
133,5 |
125,6 |
109,9 |
86,35 |
62,8 |
47,1 |
31,4 |
15,7 |
0 |
|
4 |
0% |
|
|
|
|
|
|
|
|
|
63,9% |
при
![]()

![]()
![]() ;
;
при
![]()

![]()
![]() ;
;
при
![]()

![]()
![]() ;
;
Оценим погрешность
расчета момента
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Приближенная
формула дает небольшую погрешность
![]() при
при![]() до 30%, а при
до 30%, а при![]()
![]() – возрастает. В данном случае получили,
что погрешность при номинальном и
пусковом моменте немного превышает
заданную. Погрешность в приближенной
формуле обусловлена тем, что не учитываются
параметры обмотки статора.
– возрастает. В данном случае получили,
что погрешность при номинальном и
пусковом моменте немного превышает
заданную. Погрешность в приближенной
формуле обусловлена тем, что не учитываются
параметры обмотки статора.