

Расчёт регулятора скорости.
Для расчёта регулятора скорости необходимо преобразовать данную структурную схему к виду:

Произведём синтез регулятора скорости.
Переходной процесс контура скорости представлен на рисунке 8, а ЛЧХ на рисунке 9

Рис 8. Переходной процесс контура скорости
Как видно из рисунков система обладает малым быстродействием. Для улучшения качества переходного процесса в качестве регулятора применим пропорционально-интегральный регулятор. Скорректированная система должна обеспечить запас по фазе ∆ φ=650и по амплитуде ∆L=13 дб .
![]()

Рис 9. ЛЧХ контура скорости.
Постоянные времени определим из графиков ЛЧХ.
T= 20с;k=80.
Переходной процесс скорректировано системы представлен на рисунке 10. Из рисунка видно что перерегулирование системы σ=2,7%, а время переходного процесса tп=0,0015с.
Техническая реализация данного звена представлена на рисунке 11.
Произведём расчёт параметров звена.
Т=С*R2
k=R2/R1
Подставляя значения постоянных времени определяем параметры звена:
R1=12,5 кОмR2=1 МомC=20 мкФ.

Рис 10. Переходной процесс скорректированной системы.

Рис 11. Техническая реализация регулятора скорости.
Расчёт регулятора положения.
Для расчёта регулятора положения необходимо преобразовать данную структурную схему к виду:

Произведём синтез регулятора положения.
Переходной процесс контура положения представлен на рисунке 12, а ЛЧХ на рисунке13.

Рис 12. Переходной процесс контура положения.
Как видно из рисунков система обладает малым быстродействием. Для улучшения качества переходного процесса в качестве регулятора применим пропорционально-интегральный регулятор. Скорректированная система должна обеспечить запас по фазе ∆ φ=600и по амплитуде ∆L=12 дб .
![]()

Рис 13. ЛЧХ контура положения.
Постоянные времени определим из графиков ЛЧХ.
T= 10с;k=90.
Переходной процесс скорректировано системы представлен на рисунке 14. Из рисунка видно что перерегулирование системы σ=3,8%, а время переходного процесса tп=0,0031с.
Техническая реализация данного звена представлена на рисунке 15
Произведём расчёт параметров звена.
Т=С*R2
k=R2/R1
Подставляя значения постоянных времени определяем параметры звена:
R1=10 кОмR2=1 МомC=10 мкФ.

Рис 14. Переходной процесс скорректированной системы.
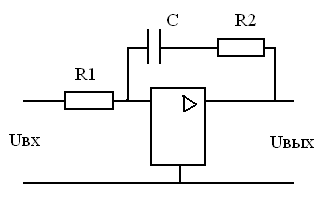
Рис 15. Техническая реализация регулятора положения.
Исследование и анализ переходных процессов.
Для анализа переходного процесса определим нагрузочную диаграмму двигателя, так как она учитывает изменение момента в переходных режимах.
![]()
Учитывая режим работы механизма (повторно кратковременный ), построим нагрузочную диаграмму двигателя.


Определим значения tр1,tр2,tо
![]() с
с
Относительная продолжительность включения определяется по формуле:
![]()
Найдём значения времени работы при Мс=Мсmaxи Мс=Мсmin
![]() с
с
![]() с
с
Таким образом время отдыха определим из формулы:
![]() с
с
Примем Мсmin=0,1*Мсmax
Приведём момент сопротивления к валу двигателя на основе закона равновесия мощностей на валу двигателя и на валу редуктора
![]() Н*м
Н*м
Примем Мсmin=0,1*Мсmax=0,318 Н*м
Переходной процесс системы при отсутствии момента сопротивления изображён на рисунке
Переходной процесс системы при подаче момента сопротивления изображённого на рисунках 16 и 17 будет иметь вид. Из рисунков видно что система даёт погрешность меньше предъявленной в задании.

Рис 16. Переходной процесс системы при подаче момента сопротивления.

Рис 17. Переходной процесс системы при подаче момента сопротивления