

Определение передаточной функции промежуточного усилителя.
В современных тиристорных приводах постоянного тока для улучшения статических и динамических характеристик системы в промежуточные усилители вводятся различные корректирующие цепи, чем обеспечивается регулирование необходимых динамических свойств системы.
В системах позиционирования статическая ошибка, приведенная к валу двигателя при вращательном движении механизма определяется из выражения:
 ,
(23)
,
(23)
где kрс– коэффициент усиления разомкнутой системы;
i– передаточное отношение редуктора;
Mc– момент сопротивления;
β- жёсткость механической характеристики системы;
δзад – заданная погрешность позиционирования.
Жёсткость механической характеристики системы определяется из выражения:
 (24)
(24)
Ток короткого замыкания определим по формуле:
 А
(25)
А
(25)
Уравнение электромеханической характеристики имеет вид:
 (26)
(26)
Подставляя значения Iкз,Iн,ωннаходим значение скорости идеального холостого ходаω0=478,015 рад/с.
Учитывая, что электромеханическая и механическая характеристики представляют собой прямую линию, определим жёсткость механической характеристики:
 Н*м*с/рад
Н*м*с/рад
Подставив полученные значения в формулу (23) найдём коэффициент усиления разомкнутой системы:
 рад/В
рад/В
Коэффициент усиления разомкнутой системы:
![]() (27)
(27)
Из формулы (27) найдём коэффициент усиления промежуточного усилителя:
 (28)
(28)
Техническая реализация промежуточного усилителя представлена на рисунке 3

Рис3. Промежуточный усилитель.
Произведём расчёт параметров звена
kпр.ус=R8/R7
R7=10кОм ;R8=1МОм
Определение передаточных функций датчиков.
Определение передаточной функции датчика тока.
Передаточная функция датчика тока определяется следующим образом:
 В/А
В/А
где Iн- номинальный ток двигателя.
Определение передаточной функции датчика скорости
Технические данные тахогенератора П-1 представлены в таблице 4
Передаточная функция тахогенератора имеет вид
 В*с/рад
В*с/рад
Так как в обратную связь принято подавать напряжение 10 В, то необходим согласующий усилитель, коэффициент усиления которого равен:
![]() ,
,
Тогда
![]() В*с/рад
В*с/рад
Согласующее устройство выполним на базе делителя напряжения.
![]()
Примем R1=10 Ом R2=200 Ом.
Определение передаточной функции датчика положения
Примем диапазон регулирования 1800или 3,14 рад. Тогда, учитывая, что в обратную связь подаётся 10 В, передаточная функция будет иметь вид:
![]() В/рад
В/рад
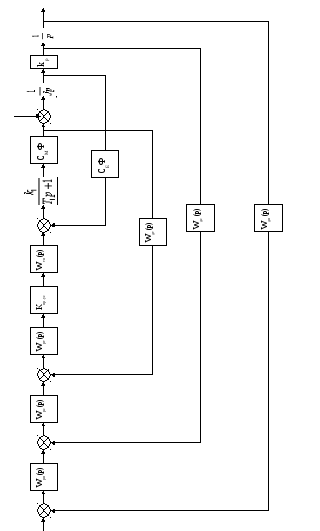
Структурная схема сар позиционирования

Расчёт регулятора тока.
Для расчёта регулятора тока необходимо преобразовать данную структурную схему к виду:

Для расчёта регулятора тока воспользуемся частотным методом с использованием ЛАЧХ и ЛФЧХ разомкнутой системы.
Синтез регуляторов с помощью логарифмических частотных характеристик производится в таком порядке. Вначале строятся ЛАЧХ Lнск(ω) и ЛФЧХφнск(ω) нескорректированной системы. Далее определяют желаемую ЛАЧХ системы, т. е. ЛАЧХ, при которой выполняются заданные требования к качеству управления. Желаемая ЛАЧХLск(ω) (её обычно обозначаютLж(ω)) скорректированной системы состоит из нескольких основных участков:
низкочастотный. Определяет установившиеся детерминированные режимы.
среднечастотный. Определяет качество переходного процесса (перерегулирование, время переходного процесса).
высокочастотный. Не оказывает существенного влияния на качество переходного процесса, поэтому её принимают совпадающей с ЛАЧХ нескорректированной системы.
Учитывая выше сказанное, произведём синтез регулятора тока.
Переходной процесс контура тока представлен на рисунке 4, а ЛЧХ на рисунке 5

Рис4. Переходной процесс контура тока.
Как видно из рисунков система обладает большой колебательностью, большим перерегулированием σ=75% и малым запасом по фазе ∆ φ=60. Для улучшения качества переходного процесса в качестве регулятора применим интегро-дифференцирующее звено. Скорректированная система должна обеспечить запас по фазе ∆ φ=660.
![]()
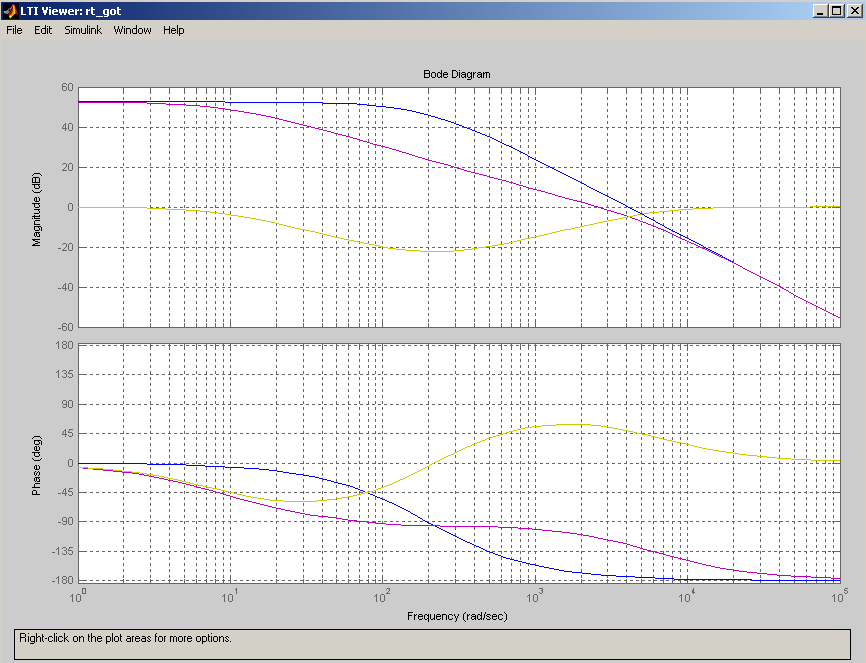
Рис5. ЛЧХ контура тока.
Постоянные времени определим из графиков ЛЧХ.
T1= 0,12с;T2=0,00526с;T3=0,0039с;T4=0,00017с.
Переходной процесс скорректировано системы представлен на рисунке 6. Из рисунка видно что перерегулирование системы σ=4%, а время переходного процесса tп=8*10-4с.
Техническая реализация данного звена представлена на рисунке 7.
Произведём расчёт параметров звена.
T1+T4=T2+(1+R1/R2)T3
T2=R1C1
T3=R2C2
Подставляя значения постоянных времени определяем параметры звена:
R1=10 кОмR2=1 кОмC1=6 мкФC2=10 мкФ.

Рис 6. Переходной процесс скорректировано системы.

Рис 7. Техническая реализация регулятора тока.