

8 Контур скорости

Рис. 7 Структурная схема контур скорости

Рис. 8 ЛАХ и ЛФХ некорректированного контура
Для улучшения качества переходного процесса применим регулятор следующего вида:
![]()
Техническая реализация регулятора:



Применив тако й
регулятор, получаем следующие
логарифмические характеристики:
й
регулятор, получаем следующие
логарифмические характеристики:

Рис. 9 ЛАХ и ЛФХ скорректированного контура
Как видно из графиков, запас устойчивости по модулю порядка 30 дб, по фазе порядка 46 градусов.
9 Определение коэффициента разомкнутой системы
В современных тиристорных приводах постоянного тока для улучшения статических и динамических характеристик системы в промежуточные усилители вводятся различные корректирующие цепи, чем обеспечивается регулирование необходимых динамических свойств системы.
В системах
позиционирования статическая ошибка
при поступательном движении механизма
определяется из выражения:
![]() ,
,
Где К – коэффициент усиления разомкнутой системы;
ρ – приведённый радиус;
Fс – максимальная сила сопротивления механизма;,
β – жёсткость механической характеристики системы,
![]()
ρ=Vумах/ωумах, где
Vумах – максимальная скорость движения механизма
![]() умах
– максимальная скорость двигателя;
умах
– максимальная скорость двигателя;
Ошибка слежения
при установившемся вращательном
движении механизма с максимальной
скоростью:![]() ,
,
где ωу max – максимальная скорость вращения механизма.
Суммарная ошибка не должна превышать заданной ошибки:
![]() ,
,
откуда, подставив числовые значения:

примем K=4.
10 Структурная схема сар положения

Структурная схема САР положения будет выглядеть следующим
образом:

Рис. 10 Структурная схема САР положения
Для улучшения качества переходного процесса применим регулятор следующего вида:
![]()
Техническая реализация регулятора:


 Логарифмические
характеристики контура положения:
Логарифмические
характеристики контура положения:
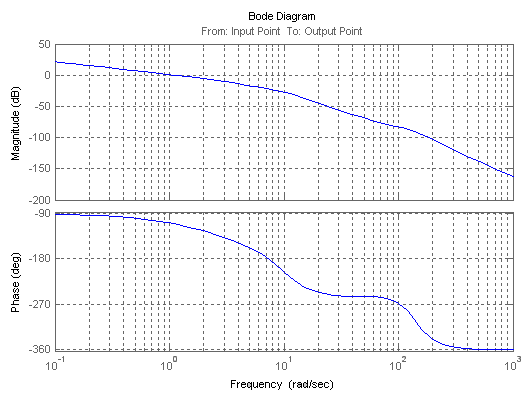
Рис. 11 ЛАХ и ЛФХ
11 Исследование и анализ переходных процессов
При отсутствии момента сопротивления и подаче задающего напряжения 10 В, соответствующего 5 рад, переходный процесс имеет следующий вид:

Время переходного процесса 1.8 секунды
Перерегулирование составляет 4%
Время запаздывания tz=0.8 с
Ток якоря:

Пусковой ток порядка 360 А
 При
появлении максимального момента
сопротивления на 6 секунде, график
переходного процесса примет вид:
При
появлении максимального момента
сопротивления на 6 секунде, график
переходного процесса примет вид:
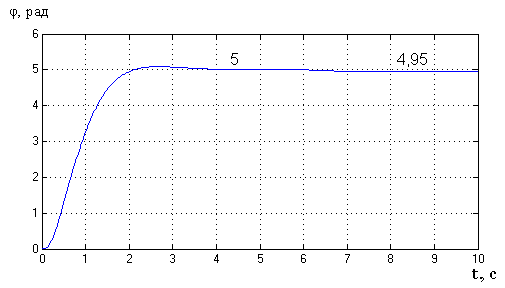
Как видно из графиков, выходная координата отклоняется на 0.05 рад., что соответствует заданным параметрам качества.
Заключение
В результате проектирования был разработан автоматизированный электропривод следящей системы, обеспечивающей заданную точность слежения механизма при максимальной скорости задающего сигнала и максимальном моменте сопротивления. Исследованы и проанализированы переходные процессы при различных режимах работы системы.
Спроектированная система удовлетворяет всем поставленным требованиям.
