

III. Получение уравнения движения сар
Преобразуем исходную структурную схему

Рис.7. Структурная схема САР
На схеме символами WЭУ, WДОС и т. д. кратко обозначены символы
передаточных функций WЭУ(p), WДОС(p). В структурной схеме отсутствует
дополнительная обратная связь. Однако влияние этой связи не устранено, так
как в схему введена эквивалентная дополнительной обратной связи
передаточная функция
 (15)
(15)
Дальнейшее преобразование позволяет перейти к еще более простой структуре системы

Рис.8. Цепочка с обратной связью
На схеме

выражений для передаточных функций элементов САР и выражения (15)
Передаточная функция разомкнутой системы принимает вид
 (16)
(16)

И, наконец, преобразование последней структурной схемы, которая является
цепочкой с обратной связью, позволяет получить передаточную функцию W(p)уравнения системы
 (17)
(17)
Уравнение системы получается из формулы (17) при подстановке в нее выражение для передаточной функции разомкнутой системы WPC(p)

Числитель передаточной функции:

Коэффициент полинома числителя передаточной функции системы имеют вид:
Знаменатель передаточной функции:

Коэффициенты полинома знаменателя передаточной функции системы имеют вид:


Уравнение системы приобретает вид:
 (18)
(18)
Для выполнения ручного расчета границ рабочей области, уравнение (18)
целесообразно упростить. Следует принять a0 = a1 = a2 = a3 = 0, а также принять
ТМУ = ТK = 0. После упрощения уравнение (18) примет вид
 (19)
(19)
где

IV. Синтез сар на эвм с применением метода эффективных полюсов и нулей
Задачу синтеза системы автоматического регулирования (САР) можно
сформулировать следующим образом.
Заданы: технологическая схема, объект управления и требования к качеству регулирования (время переходного процесса, отклонения координат в
переходном процессе и точность в установившемся режиме). Необходимо
определить структуру САР, уравнения ее элементов и значения параметров
элементов системы так, чтобы эти требования выполнялись.
Очевидно, что структура в элементарном виде должна отражать принцип управления по отклонению (ошибке).
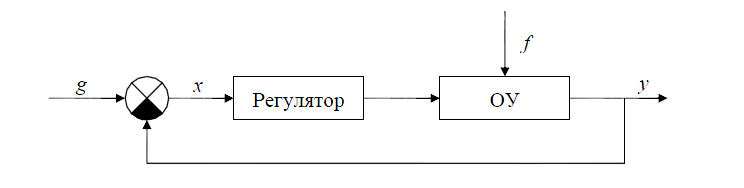
Рис.9. Структурная схема САР
Объект управления (ОУ) известен, остается только «развернуть»
регулятор. В исходном варианте его структуру следует принять наиболее
простой. В этом варианте регулятор включает: датчик-измеритель
регулируемой величины (Д), усилитель (У), исполнительный механизм (ИМ) и
регулирующий орган (РО).
Типы датчика, исполнительного механизма и регулирующего органа
определяются назначением и конструкцией объекта управления.
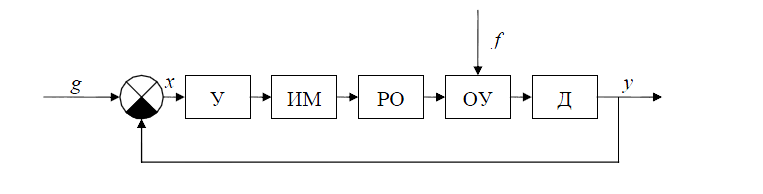
Рис.10. Структурная схема САР и регулятора
Далее необходимо получить уравнения элементов или воспользоваться
готовыми уравнениями и затем составить общее уравнение САР. Требования к процессу регулирования определяются также расчетчиком с опорой на требования, предъявляемые к технологическому процессу. Например, время регулирования и отклонения координат в переходном процессе не должны приводить к потере качества вырабатываемой продукции. Следовательно, отклонения регулируемой величины должны быть в пределах технологических допусков, а если отклонения превосходят эти допуски, то должно ограничиваться время их действия, т.е. время переходного процесса.
После определения требований решается задача синтеза. Эту задачу
целесообразно разбить на два этапа: ручной расчет и синтез на ЭВМ. Ручной
расчет делается по упрощенной математической модели второго порядка (в
уравнении САР принимаются равными нулю коэффициенты при старших
производных).
Расчет включает:
- определение мощности и типа исполнительного механизма, типа регулирующего органа, измерителя и других элементов;
- определение численных значений параметров и коэффициентов уравнений САР;
- построение рабочей области;
- расчет показателей качества САР для различных точек рабочей области и др.
Для построения рабочей области и расчета показателей качества САР должны применяться приводимые ниже алгоритмы метода эффективных полюсов и нулей. Результатом ручного расчета является возможность назначения диапазонов изменений значений переменных параметров элементов, за счет изменения которых предполагается достигнуть требуемого качества САР.
Далее выполняется синтез САР на ЭВМ с применением процедур
оптимизации методами случайного или случайно-направленного поиска.
Если в процессе ручного расчета или синтеза на ЭВМ поставленная
задача не решается, то это означает, что необходимо применить другой более
совершенный закон регулирования. Примененный закон регулирования можно определить по уравнению регулятора. Для его изменения необходимо ввести корректирующие элементы с помощью дополнительных обратных связей.
Далее необходимо продолжить решение задачи синтеза.
После завершения решения задачи синтеза требуется подготовить
уравнение САР для численного интегрирования, выполнить интегрирование на
ЭВМ, проанализировать результат и сделать выводы.