

Разбиение систем на звенья.
При построении функциональной схемы систем управления мы разбивали систему на элементы направленного действия в соответствии с функциями, которые они выполняют.
Для получения математического описания системы, её расчленяют на элементы направленного действия – звенья так, чтобы можно было сравнительно просто получить их математическое описание.
Звено – часть системы, которая осуществляет некоторое преобразование входной величины в выходную. В отличие, от функционального элемента, звено не обязательно конструктивно или схемно оформлено.
Если разбить систему на звенья направленного действия, то математическое описание каждого звена может быть выполнено без учета его связей с другими звеньями системы. При этом математическое описание всей системы может быть получено, как совокупность составленных независящих друг от друга уравнений звеньев системы и уравнений связи между ними.
Уравнения связи – уравнения, отражающие характер передачи воздействий между звеньями системы.
В результате разбиения системы на звенья, получается структурная схема системы.
Структурная схема системы – схема, показывающая, из каких звеньев состоит система, и как эти звенья соединены между собой.
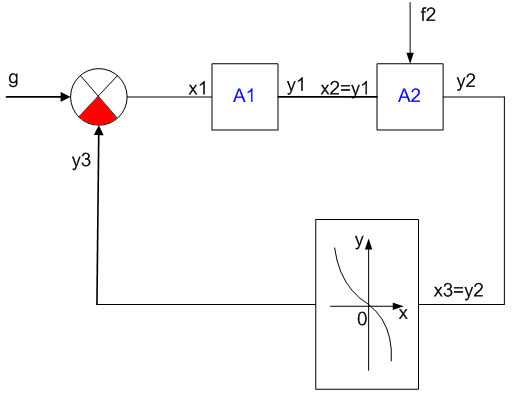
Схема состоит из 3-х звеньев. Зависимость между y1 и х1 задана выражением А1. Зависимость между y2 и х2 – выражением А2. Для третьего звена у3 и х3 – в виде графика.
Внешнее возмущающее воздействие на второе звено показано стрелкой f2. ЭС (суммирующее звено), его выходная величина х1=g – y3.
Статические и динамические характеристики звеньев систем.
Уравнения звеньев систем составляются на основе тех физических законов, которые характеризуют их поведение (законы механики, электротехники, оптики и т.п.).
Уравнения, описывающие поведения звеньев, могут быть алгебраическими, дифференциальными и интегральными. Как правило, это дифференциальные уравнения.
Статическая характеристика звена представляет собой зависимость между входной x и выходной y величинами в установившемся режиме при различных постоянных значениях внешнего воздействия f (f(t)=f).
Рассмотрим пример звена – электродвигатель постоянного тока с независимым возмущением:
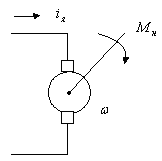
Входная величина – iя, выходная величина – угловая скорость ω. Внешнее воздействие – момент нагрузки на валу Мн и напряжение питания обмотки независимого возбуждения Uп.
Один из многих возможных режимов работы двигателя, при котором Uп=Мн=const, называется номинальным. В этом режиме, как правило, рассчитывается работа двигателя.
При этих значениях
![]() и
и
![]() считается, что возмущение f
= 0. В этом случае отклонения Мн и
Uп от номинальных
будут представлять из себя внешнее
воздействие.
считается, что возмущение f
= 0. В этом случае отклонения Мн и
Uп от номинальных
будут представлять из себя внешнее
воздействие.
В документации на электродвигатель приводят статические характеристики, которые получают экспериментально при производстве двигателей при разных значениях момента нагрузки.
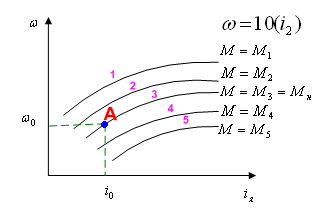
Точка А соответствует номинальному значению тока якоря i0 и угловой скорости ω0. При увеличении нагрузки на валу (Мн < М0) статическая характеристика перемещается вниз (кривые 4, 5). При уменьшении нагрузки кривые ω(iя) будут проходить выше (1, 2).
В общем случае зависимость установившегося значения выходной величины y от установившегося значения входной величины x является нелинейной.
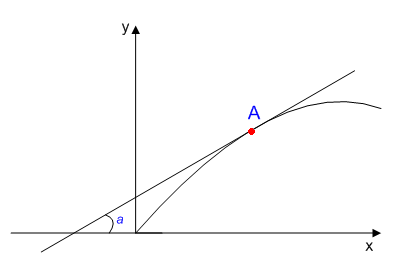
Угловой коэффициент, образуемый касательной к статической характеристике, в любой точке А называется коэффициентом усиления:
![]()
Из рисунка видно, что:
![]() ,
,
где r – масштабирующий коэффициент, зависящий от масштабов, принятых по осям x и y.
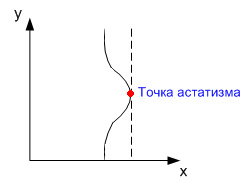
Значение коэффициента k0 служит мерой астатизма звена. Если k0 = ∞, то звено называется астатическим.
Астатическое звено при некотором значении входной величины x = x* находится в равновесии при любом значении выходной величины y.

Если на находящееся в некотором состоянии звено подействует некоторое возмущающее воздействие, то оно начнет переходить в некоторое другое состояние. Характер процесса перехода системы из одного состояния в другое определяется динамической характеристикой звена (уравнением движения).
Уравнение движения звена – это уравнение (обычно дифференциальное), определяющее изменение во времени выходной величины звена по заданному изменению во времени его входной величины.
Дифференциальные уравнения могут быть разными для звеньев с сосредоточенными параметрами. Общее уравнение имеет вид:
F(y(n),
y(n–1),
…,![]() ,у,
x(m),
x(m–1),
…,
,у,
x(m),
x(m–1),
…,![]() ,
x,
f(g),
f(g-1),
…,
,
x,
f(g),
f(g-1),
…,![]() ,
f)
= 0 (1)
,
f)
= 0 (1)
Где m, n, g – натуральные числа, показывающие высший порядок производной от входной величины x, выходной y и внешнего воздействия f.
На практике, в большинстве случаев m < n, а g < n.
Например, при n = 1 уравнение звена имеет вид:
F( , y, x, f) = 0;
при n = 2:
F(y2, , y, , x, , f) = 0.
Уравнение статической характеристики звена можно получить из уравнения (1), положив все производные по времени равными 0, т.е.:
F(0, 0, …, 0, y, 0, 0, …, 0, x, 0, 0, …, 0, f) = 0
Для линейных звеньев (описываемых линейными дифференциальными уравнениями) характерно, что реакция звена на линейную комбинацию воздействий равна той же линейной комбинации реакций звена на каждое влияние в отдельности. Это свойство линейных звеньев выражает собой принцип суперпозиции.
Т.к. решение нелинейных дифференциальных уравнений – задача значительно более сложная, то, когда это возможно, меняют нелинейные дифференциальные уравнения на приближенные линейные. Этот процесс называется линеаризацией.

Рис. 1
Если дифференциальное уравнение звена нелинейно из-за нелинейности его статических характеристик, то для линеаризации уравнения необходимо заменить нелинейную статическую характеристику y = ψ(x) на линейную характеристику y=ax + b.
Линеаризация осуществляется при помощи разложения в ряд Тейлора функции y = ψ(x). Это делается в окрестности некоторой точки (x0, y0) и отбрасыванием всех членов разложения, содержащих отклонение ∆y в степени, выше первой. Это означает замену кривой y = ψ(x) касательной в точке (x0, y0). В отдельных случаях линеаризация осуществляется путем проведения секущей между точками А и В (Рис.1).
Рассмотрим процесс линеаризации нелинейного уравнения звена при помощи разложения в ряд Тейлора на примере элемента, поведение которого описывается дифференциальным уравнением вида:
F(y”, y’, y, x,) = 0 (1)
Статическая характеристика такого звена описывается уравнением:
F(0, 0, y, x,) = 0
Если x0, y0 – некоторые установившиеся состояния, то координаты x и y можно записать в виде:
x = x0 + ∆x;
y = y0 + ∆y,
Где ∆x и ∆y – отклонения координат x и y от установившегося состояния.
Уравнение (1) в отклонениях имеет вид:
F(∆y”, ∆y’, y0 + ∆y, x0 + ∆x) = 0
Раскладывая левую часть уравнения в ряд Тейлора относительно точки установившегося состояния с координатами (0, 0, x, y), получим:
![]() (2)
(2)
Индекс «0» означает, что производные берутся в точке x = x0, y = y0, из чего следует, что ∆x=∆y=0. Здесь в уравнении (2) не написаны члены, содержащие отклонения ∆x и ∆y в степени, выше первой. Частные производные в уравнении (2) – это числа, величина которых зависит от вида функции F(y”, y’, y, x,) = 0 и значений x0 и y0.
Полагая отклонения ∆x и ∆y и их производные по времени малыми, отбросим в уравнении (2) все члены, содержащие отклонения ∆x и ∆y, а также их производную в степени, выше первой, получим:
 (3)
(3)
Уравнение (3) является линейным дифференциальным уравнением с постоянными коэффициентами I, II, III, IV.
Необходимым условием линеаризации является разложимость в ряд Тейлора функции:
![]() .
.
Уравнение (3) приближенно заменяет уравнение (1) лишь в некоторой малой окрестности точки с координатами (0, 0, x, y). Величина этой окрестности зависит от вида функции , т.е. от величины производных порядка, выше первого в рассматриваемой точке. Линеаризованное уравнение обычно записывается в каноническом виде:
![]() (4)
(4)
![]()
![]()
Линеаризация уравнения (1) при помощи
разложения в ряд Тейлора означает замену
поверхности, описываемой этим уравнением
в пространстве переменных
![]() плоскостью касательной к поверхности
точки с координатами 0, 0, y0,
x0. Ошибка
линеаризации тем меньше, чем меньше
отклонение друг от друга точек поверхности
(1) и точек плоскости (4).
плоскостью касательной к поверхности
точки с координатами 0, 0, y0,
x0. Ошибка
линеаризации тем меньше, чем меньше
отклонение друг от друга точек поверхности
(1) и точек плоскости (4).
Пример составления дифференциального уравнения звеньев систем управления.
Пример1: составим дифференциальное уравнение двигателя постоянного тока с независимым возбуждением и проведем его линеаризацию:

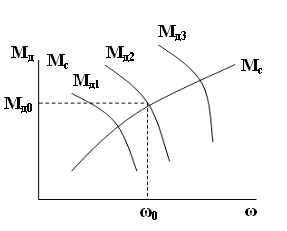
Рис.1.
Мс – момент сопротивления;
Мд – момент движения.
По второму закону Ньютона для вращательного движения уравнение для моментов на валу двигателя имеет вид:
![]() ,
где (1)
,
где (1)
ω – угловая скорость и момент инерции движущихся частей, приведенных к валу;
Мд – вращающий момент
Мс – момент сопротивления на валу двигателя.
Мд представляет из себя функцию двух переменных: скорости вращения и ????, а момент сопротивления функцию двух переменных (ω, t):
Мд = Мд(ω, u),
Мс = Мс(ω, t)
Т.к. Мд = Мд(ω, u) и Мс = Мс(ω, t) являются нелинейными функциями (см. рис.1), то уравнение (1) будет нелинейным дифференциальным уравнением.
Для линеаризации уравнения (1) перейдем к уравнению в отклонениях от установившегося режима, т.е. в точке, где Мс0 = Мд0. Пусть при этом ω = ω0, а u = u0. Разложим нелинейные функции Мд(ω, u), Мс(ω, t) в ряд Тейлора в окрестностях точки ω0 и u0 и отбросим члены, содержащие производные, выше первого порядка:
![]() (2)
(2)
![]() (3)
(3)
Подставив (2) и (3) в (1) получим:
 (4)
(4)
В уравнении (4) все члены имеют размерность момента, однако часто бывает необходимо получить уравнение в относительных единицах с безразмерными коэффициентами или с коэффициентами размерности времени в степени, равной порядку соответствующей производной.
Разделим обе части уравнения на номинальное значение Мн:

Выберем некоторые величины переменных в качестве базисных.
Для напряжения u удобно взять максимальное значение uмах, а для угловой скорости – её номинальное значение ωн.
Умножив и разделив каждый член уравнения на соответствующую базисную величину, получим:

Введем обозначения:

Подставив эти коэффициенты в уравнение, получим:
![]()
Функция f(t) характеризует возмущающее воздействие, x(t) – управляющее воздействие, y(t) – выходную величину. Коэффициент Т имеет размерность времени (секунды) и называется постоянной времени двигателя.
Отношение ky/kc характеризует зависимость между выходной координатой y и входным воздействием x в установившемся режиме и называется коэффициентом усиления.
Пример2: получение дифференциального уравнения электрического пассивного четырехполюсника.
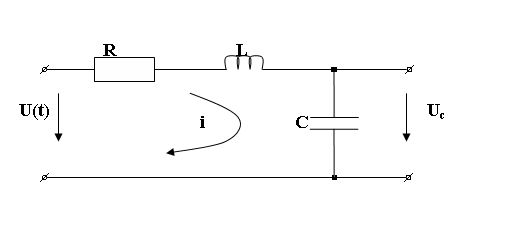
Входной характеристикой является напряжение на входных зажимах u(t), выходной – напряжение на конденсаторе uс. Т.к. цепь является линейной (все элементы цепи линейные), уравнение можно составлять как в отклонениях, так и в безразмерных относительных единицах.
Падение напряжения на резисторе R:
![]() ,
,
Падение напряжения на индуктивности:
![]()
По второму закону Кирхгофа имеем, что приложенное напряжение – это его падение на всех элементах цепи:

Если обозначить U(t)
= x; CL
=
![]() ;
RC = T2,
то тогда:
;
RC = T2,
то тогда:
![]()
Составление дифференциальных уравнений систем автоматического управления.
Имея дифференциальные уравнения элементов системы и уравнения связи можно получить дифференциальные уравнения всей системы. Однако при исследовании систем управления обычно необходимо знать поведение выходной координаты системы, а не всех её элементов, поэтому можно от системы уравнений описывающих поведение элементов путем исключения промежуточных переменных перейти к одному уравнению. Это уравнение будет содержать только выходную координату системы, а также внешние воздействия. Зная внешнее воздействие, приложенное к системе, и решив дифференциальное уравнение, можно найти реакцию системы управления на эти воздействия. Пусть имеем уравнение объекта управления:
![]() (1)
(1)
и уравнение управляющего устройства:
![]() (2)
(2)
Запишем уравнение всей системы управления относительно ∆y. Для этого найдем из уравнения (1) величину ∆x, а также её производную:

Подставив значение ∆x
и
![]() в уравнение (2), получим уравнение
системы управления:
в уравнение (2), получим уравнение
системы управления:
![]()
Таким образом, если объект управления и устройство управления описываются дифференциальными уравнениями первого порядка, то система управления в целом описывается дифференциальным уравнением второго порядка.
Пусть теперь объект управления описывается уравнением (1), а устройство управления – дифференциальным уравнением второго порядка:
![]() (3)
(3)
Для получения дифференциального уравнения системы управления необходимо получить значение ∆x, а также первую и вторую производные от ∆x:

Подставив в уравнение (3) выражение
для ∆x,
и
![]() ,
получим искомое уравнение для всей
системы в целом:
,
получим искомое уравнение для всей
системы в целом:
![]()
Полученное уравнение третьего порядка устанавливает связь между возмущающим воздействием f на систему и реакцией системы y.
Таким образом, для получения дифференциального уравнения системы, необходимо получить вначале дифференциальное уравнение для объекта управления и устройства управления; исключив из полученных уравнений промежуточные величины, можно получить дифференциальное уравнение относительно интересующих нас величин, но, как правило, эти преобразования очень трудоемки и громоздки.
Для того чтобы упростить решение данной и других задач, в теории автоматического управления вместо рассмотрения величин, характеризующих состояние во времени – оригиналов, рассматриваются соответствующие им изображения, полученные при помощи преобразований Лапласа.
Таким образом, при исследовании и расчетах систем управления широко используются операции исчисления, позволяющие существенно облегчить исследование сложных систем.
Операционное исчисление основывается на преобразованиях Лапласа и Фурье, которые позволяют заменять операции дифференцирования и интегрирования функций на операции более низкого ранга.
Линейные системы.
Система называется линейной, если уравнение динамики и, следовательно, статики этой системы линейны.
К линейным системам применим принцип суперпозиции, который формулируется следующим образом:
Пусть
![]() ,
где j = 1, 2, …, m
– некоторые входные сигналы линейной
системы, а
,
где j = 1, 2, …, m
– некоторые входные сигналы линейной
системы, а
![]() – её реакция на каждый из сигналов,
тогда для линейной системы суммарная
реакция на суммарный входной сигнал
равна:
– её реакция на каждый из сигналов,
тогда для линейной системы суммарная
реакция на суммарный входной сигнал
равна:
![]()
Передаточная функция линейной системы.
Линейные системы в общем случае могут быть описаны дифференциальным уравнением с постоянными коэффициентами вида:
![]()
Используя свойство (3), дифференцирование оригинала, к обеим частям уравнения получим:
![]()
При нулевых начальных условиях найдем связь между лапласовскими изображениями системы y(t) и входного воздействия на систему x(t), получим:

Функция
![]() представляющая собой отношение
изображения выходного сигнала линейной
системы к изображению входного сигнала
при нулевых начальных условиях, называется
передаточной функцией линейной
системы.
представляющая собой отношение
изображения выходного сигнала линейной
системы к изображению входного сигнала
при нулевых начальных условиях, называется
передаточной функцией линейной
системы.
Смысл передаточной функции заключается в том, что она представляет собой некий оператор, преобразующий внешнее воздействие на входе в реакцию системы на выходе, т.е.:
![]()
Таким образом, любой линейный объект может быть представлен следующим образом:

В случае, если система управления является замкнутой (охваченной обратной связью), то передаточная функция определяется как:
![]() ,
где (2)
,
где (2)
Wоб.св.(p) – передаточная функция управляющего устройства,
Знак «+» - соответствует отрицательной обратной связи, а «-», наоборот.

Формула (2) получается из следующих соображений:
по определению передаточной функции имеем:
![]() ,
но
,
но
передаточная функция объекта управления:
![]() ,
а
,
а
передаточная функция звена обратной связи:
![]()
Как видно из рисунка:
![]() ,
т.е.
,
т.е.
![]() ,
,
разделив числитель и знаменатель на X2(p) получим:

Переходная функция.
Сигнал h(t), полученный на выходе системы при подаче на её вход единичного скачка u(t), называется переходной функцией системы.
Известно, что изображением единичного скачка является:
![]() и, следовательно,
и, следовательно,
по определению передаточной функции:
![]() .
.
Связь между передаточной и переходной функцией находиться из формулы:
![]()
при x(t) = u(t) получим:
![]()
Отсюда имеем:
![]() ,
отсюда видно, что
,
отсюда видно, что
оригинал передаточной функции равен производной от переходной функции.
Реакция системы y(t) на произвольное входное воздействие x(t), выраженное через переходную функцию h(t) имеет вид:
![]()
Весовая или импульсная переходная функции системы.
Рассмотрим функцию δ(t), называемую функцией Дирака. В теории управления её называют единичным импульсом. Определим δ(t):

![]() ∞, при t = 0
∞, при t = 0
δ(t) =
0, при t ≠ 0
или
![]()
В общем случае, как и функция Хевисайда, функция Дирака является математической абстракцией.
Рассмотрим вспомогательную функцию δ(t, μ):
![]()
В этом случае функцию δ(t) можно рассматривать как предел функции δ(t,μ) при μ → ∞, т.е.
 ∞, при t
= 0
∞, при t
= 0
![]()
0, при t ≠ 0
Если воспользоваться формальным равенством, то по определению производной получим:

Исходя из формального равенства
![]() и того, что
и того, что
![]() получим:
получим:
![]() .
.
Сигнал, получаемый на выходе линейной системы при подаче на её вход единичного импульса, называется весовой или импульсной переходной функцией. И так как изображение входного сигнала , то по определению передаточной функции:
Y(p) = W(p),
т.е., переходя от изображения к оригиналу:
![]()
получаем оригинал передаточной функции.
Частотные и логарифмические характеристики линейных систем.
Частотной характеристикой линейной системы или комплексно- частотной функцией линейной системы называется функция W(jω), получаемая из передаточной функции системы подстановкой p = jω.
Физически эта подстановка означает, что сигнал на входе системы является синусоидальным (гармоническим). Частотную характеристику можно представить в виде:
![]() (1)
(1)
![]()
Где R(ω) и I(ω) вещественная и мнимая части комплексно-частотной характеристики соответственно.
Формула (1) показывает, что W(jω) является векторной суммой R(ω) и I(ω) в декартовых координатах на комплексной плоскости. В полярных координатах:
![]() (2),
(2),
где

Функции W(ω) и Θ(ω) определяют изменение амплитуды и фазы колебаний на выходе по отношению к амплитуде и фазе колебаний на входе и называются АЧХ и ФЧХ соответственно.
Рассматривая W(jω) как вектор и варьируя частоту входного сигнала ω от 0 до ∞, получаем на комплексной плоскости кривую, описываемую концом этого вектора. Эта кривая называется годографом вектора комплексно- частотной функции или амплитудно-фазовой частотной характеристикой (АФЧХ).
Заметим, что
![]()
![]()
jI(ω)
R(ω)

Широкое практическое применение нашли частотные характеристики, построенные в логарифмическом масштабе.
Логарифмируя выражение (2) получаем:
![]()
Зависимость
![]() называется логарифмической
амплитудно-частотной характеристикой
(ЛАЧХ), а Θ = Θ(lgω) –
логарифмической фазо-частотной
характеристикой (ЛФЧХ).
называется логарифмической
амплитудно-частотной характеристикой
(ЛАЧХ), а Θ = Θ(lgω) –
логарифмической фазо-частотной
характеристикой (ЛФЧХ).
ЛАЧХ и ЛФЧХ строятся в логарифмическом масштабе, т.е. по оси абсцисс откладываются логарифмические частоты.
За единицу масштаба принимается декада – это частотный интервал, соответствующий изменению частоты в 10 раз.
По оси ординат при построении ЛФЧХ фаза откладывается в радианах или угловых градусах.