

Классификация систем автоматического управления.
Большое разнообразие используемых в технике САУ требует использования различных признаков их классификации.
В зависимости от назначения САУ делят на системы стабилизации, программного управления и следящие системы.
Системы стабилизации – предназначены для поддержания постоянного значения управляемой величины у(t). В этих системах задающее воздействие g(t)=g0=const.
В свою очередь в зависимости от того, используются или не используются дополнительные источники энергии, эти системы делятся на:
Системы прямого действия – системы, в которых регулируемый орган перемещается непосредственно чувствительным элементом.

При h=h0 клапан запирает приток жидкости. Величина h0 задает требуемое значение регулируемой величины.
Системы непрямого действия – системы, в которых используется усилитель, получающий энергию извне от дополнительного источника.
Системы программного управления – предназначены для изменения управляемой величины у(t) по заранее заданной программе, называемой программой управления.
В таких системах задающее воздействие является известной функцией времени g=g(t) или некоторой другой величины к, g=g(k).
Следящие системы – предназначены для изменения управляемой величины у(t) по закону g(t), который заранее не известен.
По характеру зависимости регулируемой величины от возмущающего воздействия в установившемся режиме системы автоматического регулирования (САР) делятся на:
Предел, к которому стремится ошибка системы регулирования с течением времени, называется установившейся ошибкой:
![]()
Система регулирования называется статической по отношению к данному внешнему воздействию, если εустан, обусловленная этим воздействием, отлична от «0». САР называется астатической по отношению к какому-либо внешнему воздействию, если εустан, обусловленная этим воздействием, равна «0».
Изобразим зависимость регулируемой величины у от величины возмущающего воздействия f :
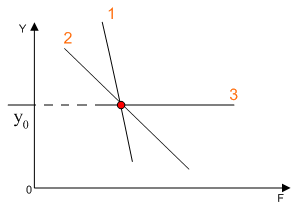
-Кривая 1 имеет место при отсутствии регулятора
-Кривая 2 характерна для статической системы регулирования
-Кривая 3 характерна для астатической системы регулирования
Эту классификацию можно продолжить, например, системы управления делятся на:
одноконтурные и многоконтурные
импульсные и аналоговые
цифровые
оптимальные
адаптивные и другие.
Задачи теории автоматического управления (ТАУ)
ТАУ изучает общие принципы построения автоматических систем и методы их исследования независимо от физической природы процессов, протекающих в них. ТАУ является теоретической базой создания автоматических систем в различных областях техники.
Основной задачей ТАУ является исследование статических и динамических свойств систем, а также разработки систем, удовлетворяющих заданным технических требованиям.
В ТАУ исследуются 2 основные задачи:
Анализ САУ – исследуется уже существующий объект
Синтез САУ – требуется на основе знаний и опыта создать несуществующий объект.
Математическое описание сау
Моделирование систем.
Одним из основных методов исследования систем является моделирование – исследование некоторого процесса при помощи модели.
Моделью данного процесса является некий процесс, имеющий с данным общие свойства, что позволяет использовать модель изучения свойств моделируемого процесса.
Используются физические и математические методы моделирования процессов.
При использовании физического моделирования процессы, протекающие в модели и оригинале, имеют одинаковую физическую природу. Физическая модель может отличаться размерами, скоростью движения, материалами и т.д.
Математическая модель – система математических отношений, описывающих изучаемый процесс или систему.
Математическая модель является абстракцией, которую можно изучать математическими методами.
Аналитические методы исследования наиболее эффективны, когда система (объект) описывается системой линейных д. у. (чрезвычайно редкий случай).