

ЭМС
.pdfЭкспериментальная кривая 2 нарастает быстрее, поскольку магнитопровод попадает в зону насыщения (см. рис. 1.9).
5.11. Способы ускорения и замедления действия электромагнитов
Для уменьшения времени срабатывания самого электромагнита прибегают к следующим средствам.
Максимально уменьшают вихревые токи в магнитопроводе, увеличивающие время трогания. Для этого следует выполнять магнитопровод из магнитных материалов с высоким удельным электрическим сопротивлением, массивные части (например, сердечник) выполнять шихтованными. При этом желательно, чтобы толщина стальных листов не превосходила двойной глубины проникновения переменного магнитного потока.
Для уменьшения времени движения стремятся по возможности уменьшить ход якоря, а также массу якоря и подвижных частей, с ним связанных. Следует также обращать внимание на трение в осях и опорах якоря, которое должно быть возможно меньшим.
Втех случаях, когда за счёт рационального выбора конструкции и параметров электромагнитов нельзя добиться нужного уменьшения времени срабатывания, прибегают к применению специальных схем. В ряде случаев к ним обращаются и для уменьшения времени срабатывания обычных электромагнитов. Некоторые из этих схем приведены на рис. 5.26 – 5.28.
Время трогания при срабатывании можно уменьшить, если увеличить активное сопротивление цепи, за счёт введения дополнительного ре-
зистора RД (рис.5.26). При этом необходимо одновременно повышать напряжение U, чтобы обеспечить номинальный ток управления IУ=U/(R+RД). Уменьшение времени трогания получается здесь за счёт снижения постоянной времени. Недостатком является то, что это достигается при пропорциональном увеличении мощности, теряемой в добавочном резисторе.
Всхеме, показанной на рис. 5.27, форсировка тока по сравнению с предыдущим случаем получается за счёт того, что в первый момент после подачи напряжения U не заряженный ещё конденсатор С создает, шунти-
руя RД, дополнительный путь для тока. Поэтому в обмотке электромагнита ток растет быстрее.
Поскольку электрическая цепь R-L-C в этом случае содержит два накопителя энергии, то необходимо, чтобы переходный процесс имел апериодический, а не колебательный характер. Для рассматриваемой схемы имеется оптимальное значение ёмкости конденсатора, обеспечивающее
минимальное время срабатывания, C = L 106/(R RД), где L — индуктивность катушки электромагнита, Гн; С — ёмкость, мкФ.
Недостатком этой схемы является наличие конденсатора, емкость которого обычно значительна.
8 1
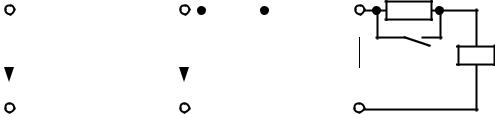
На рис. 5.28 показана схема форсировки срабатывания, в которой последовательно с обмоткой электромагнита включается добавочный резистор, шунтированный размыкающимися контактами. Эти контакты связаны с якорем данного электромагнита. При обесточенной обмотке контакты замкнуты, а размыкание происходит лишь в конце хода якоря. В период срабатывания через обмотку протекает переходный ток, установившееся значение которого равно U/R, что значительно больше номинального. Но как только электромагнит срабатывает, происходит размыкание контактов, шунтирующих RД, и ток нарастает до меньшего установившегося значения, равного U/(R+RД), что соответствует номинальному значению. Эта схема может применяться также для уменьшения размеров электромагнита в тех случаях, где особенно важно получить минимальную массу. Недостатком схемы является наличие дополнительных (размыкающих) контактов. Существует большое разнообразие схем форсировок, которые рассматриваются в специальной литературе [12].
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RД |
|
|
|
|
|
|
|
|
|
|
RД |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
U |
|
|
|
|
|
U |
С |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||||
|
R-L |
|
|
|
|
|
|
R-L |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RД
K 
 U R-L
U R-L
Рис. 5.26 |
Рис. 5.27 |
Рис. 5.28 |
Для увеличения времени срабатывания стремятся использовать все общие факторы, приводящие к увеличению времени трогания и времени движения. Для получения электромагнитов замедленного действия, так же как и в предыдущем случае, можно использовать электромагниты специальной конструкции или обычные электромагниты со специальными схемами включения.
Наиболее распространенным из первых способов является демпфирование. В случае электромагнитного демпфирования применяют короткозамкнутые обмотки, выполненные из материала с малым удельным электрическим сопротивлением, за счет которых получают увеличение времени трогания. В случае механического демпфирования применяют различные механические способы замедления движения якоря и увеличения времени движения.
Вихревые токи, появляющиеся в короткозамкнутой обмотке, задерживают изменение магнитного потока и создают замедление, как при срабатывании, так и при отпускании якоря. При отпускании якоря достигается больший замедляющий эффект, так как переходный процесс происходит при притянутом якоре, когда индуктивность системы больше. Поэтому выдержка времени при отпускании якоря в электромагнитах с короткозамк-
8 2
нутыми обмотками может быть получена в 8—12 раз больше, чем при его притяжении, и достигает 15 с.
Для получения еще больших выдержек времени (до нескольких десятков секунд) применяют различные способы увеличения времени движения якоря. Для этого якорь присоединяют к демпфирующему устройству, создающему противодействующее усилие, пропорциональное скорости перемещения. Такие устройства, замедляющие срабатывание, могут быть механическими (анкерные часовые механизмы), гидравлическими и пневматическими. Для увеличения силы противодействия эти устройства можно присоединять к якорю электромагнита через повышающую зубчатую передачу.
+ |
|
K |
VD |
|
|
|
|
|
U |
|
R-L |
– |
|
|
|
|
|
|
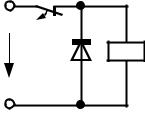
Рис. 5.29
В некоторых случаях бывает желательно получить увеличение времени трогания при выключении обычного электромагнита по специальной схеме. В тех случаях, когда напряжение питания U фиксировано, время трогания может быть увеличено включением дополнительного диода VD параллельно к обмотке (рис. 5.29). После размыкания выключателя К ток в обмотке снижается по экспоненте с максимальной постоянной времени, проходя по контуру обмотка-диод. Поскольку диод имеет одностороннюю проводимость, схема работает только на постоянном токе.
8 3
6. МАГНИТОУПРАВЛЯЕМЫЕ КОНТАКТЫ И УСТРОЙСТВА НА ИХ ОСНОВЕ
6.1. Магнитоуправляемые контакты
Магнитоуправляемый контакт (МК) представляет собой электрический аппарат, изменяющий состояние электрической цепи посредством механического замыкания или размыкания её при воздействии управляющего магнитного поля на его элементы, совмещающие функции контактов и участков электрических и магнитных цепей. Магнитоуправляемый контакт, помещённый в герметизированный баллон, называется герметизированным магнитоуправляемым контактом или герконом.
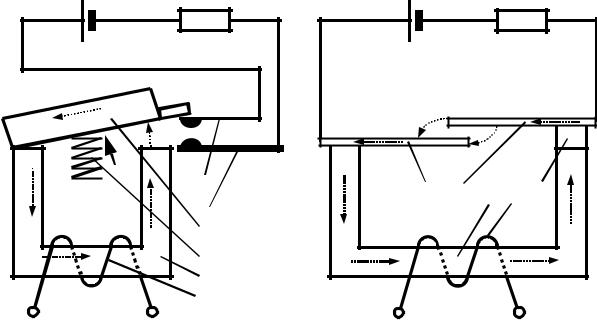
МК с обмоткой является разновидностью электромагнитных реле. На рис. 6.1 показана конструкция якорного электромагнитного реле на основе клапанной магнитной системы, состоящей из П-образного ферромагнитного сердечника 5, якоря 3 и обмотки 6. По существу это клапанный электромагнит, который при срабатывании замыкает подвижную (гибкую) кон- такт-деталь 1 и неподвижную контакт-деталь 2 электрической цепи, состоящей из источника Е и нагрузки RH. Возврат якоря в исходное положение и размыкание контактов происходит под действием возвратной пружины 4, работающей на сжатие.
В такой конструкции электромагнитного реле объединены два устройства: электромагнит и коммутатор, причём каждая деталь устройства выполняет одну единственную функцию. То есть, новое устройство (реле) получено путём простого сложения двух устройств.
+ |
E – |
RH |
Ф |
|
|
|
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
Рис. 6.1 |
+ |
E – |
|
RH |
|
|
|
|
|
|
|
Ф |
|
|
|
|
1 |
2 |
5 6 |
7 |
|
Рис. 6.2 |
|
|
|
8 4

В 1922 году В. И. Коваленков предложил электромагнитное реле, в котором есть детали, выполняющие несколько функций одновременно. Такое реле показано на рис. 6.2. Магнитная система реле Коваленкова состоит из П-образного ферромагнитного сердечника 5, обмотки 6 и двух тонких упругих ферромагнитных пластин 1 и 2, установленных с зазором и перекрытием относительно друг друга. К пластинам 1 и 2 подключена электрическая цепь, состоящая из источника Е и нагрузки RH [13]. Для того, чтобы пластины 1 и 2 не замыкались через сердечник 5, применён изолятор 7.
При подключении тока управления к обмотке в магнитной системе возникает поток Ф (показан пунктирными стрелками), который проходит через зазор между пластинами 1 и 2 и создаёт электромагнитную силу притяжения между ними. Эта сила преодолевает силу упругости пластин и замыкает их. В результате замыкается электрическая цепь. После отключения тока управления размыкание цепи происходит под действием упругости пластин.
Как следует из анализа работы, реле по рис. 6.2 построено на базе магнитоуправляемых контактов, поскольку пластины 1 и 2 выполняют сразу четыре функции. Во-первых, они являются участками магнитной цепи и пропускают магнитный поток. Во-вторых, они являются участками электрической цепи и пропускают ток нагрузки. В-третьих, они выполняют функцию коммутации. В-четвёртых, они работают как возвратная пружина, обеспечивая размыкание контактов.
Поскольку детали 1 и 2 являются ферромагнитными сердечниками и одновременно обеспечивают контактирование, их называют контактными сердечниками (КС).
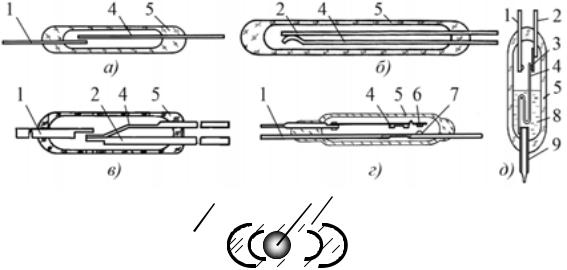
Позднее Ellwood W.B. предложил защитить контакты герметичным стеклянным баллоном [14]. На рис. 6.3, а показан герметизированный магнитоуправляемый контакт (геркон). Два КС 1 запаяны в стеклянный баллон 2. КС установлены с зазором и перекрытием относительно друг друга. Зона перекрытия показана на рис. 6.3, б.
1 |
|
3 |
1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
|
|
||||||||
|
|
|
|
|
|
||||||||||
Рис. 6.3
Как уже отмечалось, КС выполняют четыре функции одновременно. Это налагает жёсткие требования к материалу, из которого изготавливают эти детали. Материал должен иметь высокую магнитную проницаемость, высокую электропроводность, хорошие контактные свойства и механиче-
8 5
скую упругость. Кроме того, материал контактных сердечников и материал баллона (стекло) должны иметь близкие значения коэффициентов теплового расширения. В противном случае спай стекло-металл будет ненадёжным.
Контактные сердечники штампуют из ферромагнитной проволоки. В качестве материала для них используют железоникелевые сплавы, такие, как пермаллой (50Н), ковар (29НК) и др. Эти материалы имеют низкую коэрцитивную силу (6 ... 12 А/м), относительно высокую индукцию насыщения (1,5 Тл), модуль упругости (1,3 ... 1,4) 1011 Н/м2 и коэффициент теплового расширения, близкий к характеристикам стекла. Однако эти материалы не могут обеспечить низкое и стабильное сопротивление контакта, поэтому в зоне перекрытия концы КС имеют контактное покрытие 3 (см. рис. 6.3, б) из золота, родия или их сплавов толщиной от нескольких единиц до десятков микрометров. В герконах на высокие напряжения или токи покрытие выполняют из тугоплавких металлов (вольфрам, молибден).
При изготовлении МК баллон заполняется сухим защитным газом (азотом, водородом или их смесью) под давлением или вакуумируется. Защитная среда в баллоне предохраняет контактное покрытие от окисления и загрязнения. Кроме того, высокое давление газа в баллоне улучшает теплоотдачу и искрогашение при коммутации. Для повышения пробивного напряжения геркона применяют вакуумную защитную среду в баллоне.
Конструктивное решение, используемое в герконах, существенно превосходит якорные электромагнитные реле по ряду важных показателей.
1.Более простая и технологичная конструкция из-за сокращения количества деталей. Это облегчает автоматизацию производства.
2.Высокая коммутационная износостойкость (106 ... 109 циклов коммутаций) при высокой надёжности.
3.Высокое быстродействие. Время срабатывания 0,5 ... 3,0 мс. Время отпускания 0,3 ...2,5 мс.
4.Малое и стабильное электрическое сопротивление в замкнутом положении (0,05 ... 0,2 Ом).
5.Универсальность: возможность управления от обмотки и от постоянного магнита.
6.Возможность работы в агрессивных, запылённых и влажных сре-
дах.
7.Возможность работы в пожароопасных и взрывоопасных средах.
Кнедостаткам магнитоуправляемых контактов следует отнести малые коммутируемые токи, малое количество контактных групп в баллоне, наличие вибрации контактов при замыкании из-за сильного соударения КС, подверженность воздействию внешних магнитных полей, влияние тока нагрузки, проходящего через КС, на параметры отпускания, наличие хрупкого стеклянного баллона.
8 6
Серийно выпускаемые герконы имеют длину баллонов от 7,5 до 50 мм, диаметр баллонов от 2 до 5,5 мм. Общая длина (с выводами) герконов лежит в пределах от 20 до 80 мм.
Сам геркон – это только магнитоуправляемый контактный узел. Для его работы требуется источник МДС (катушка с током или постоянный магнит). При ориентации геркона вдоль магнитных силовых линий магнитный поток будет проходить через КС так же, как на рис. 6.2, создавая электромагнитную силу притяжения и замыкая электрическую цепь.
Существует большое разнообразие герконов, некоторые из которых, наиболее распространённые, рассмотрим ниже.
На рис. 6.4, а показан несимметричный замыкающий геркон, у которого в баллон 5 запаян короткий КС 1, который можно считать неподвижным, поскольку он имеет большую жёсткость, и длинный КС 4. Замыкание контактных сердечников происходит за счёт малой жёсткости длинного подвижного КС 4. Такая конструкция выгоднее при проектировании малогабаритных герконов, поскольку эквивалентная жёсткость одного длинного КС меньше, чем двух КС с половинной длиной.
На рис. 6.4, б показан размыкающий геркон. КС 2 и 4 запаяны в баллон 5 так, что в исходном положении замкнуты. Если поднести постоянный магнит со стороны подвижного КС 4, то цепь разомкнётся.
Переключающий МК показан на рис. 6.4, в. Неподвижные КС 1 и 2 имеют большое сечение и жёсткость. Подвижный КС 4 имеет малую жёсткость за счёт расплющивания. Сердечники запаяны в баллон 5 так, что в исходном положении КС 2 и 4 замкнуты, а КС 1 и 4 разомкнуты. Если вдоль геркона направить магнитное поле, подвижный КС 4 разомкнётся с КС 2 и замкнётся с КС 1.
|
1 |
|
|
4 |
5 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е)
Рис. 6.4
При конструировании герконов на большую мощность приходится решать дополнительную задачу, связанную с тем, что при коммутации
8 7
больших токов возникает дуга или искра, приводящая к быстрой эрозии контактного покрытия. На рис. 6.4, г показан МК с двухступенчатым замыканием контактов. Неподвижный КС 1 имеет участок с уменьшенным сечением, который насыщается при прохождении рабочего магнитного потока, поэтому поток вынужден проходить через воздушный рабочий зазор между КС 1 и ферромагнитным якорем 4, создавая электромагнитную силу. Якорь 4 установлен на гибкой пружине и притягивается к неподвижному КС 1.
Все детали установлены в баллоне 5 так, что воздушный зазор между якорем 4 и КС 1 больше зазора между контактными накладками 6 и 7, выполненными из тугоплавкого металла (вольфрам, молибден). Контактная пара 6-7 называется дугогасительной, поскольку при срабатывании она первой замыкается, а при отпускании последней размыкается, принимая на себя почти всю коммутационную нагрузку. Но эта пара контактов не может обеспечить низкое и стабильное сопротивление в замкнутом состоянии. Это обеспечивается основной контактной парой 1-4, имеющей покрытие из серебра.
Герконы, у которых контактирование осуществляется через твёрдометаллические детали, называются сухими, в отличие от жидкометаллических магнитоуправляемых контактов (ЖМК), у которых контакты замыкаются через жидкий металл. Такое техническое решение обеспечивает низкое (1 ... 2 мОм) и стабильное (в течение всего срока службы) сопротивление замкнутых контактов. Кроме того, увеличивается срок службы до 109 циклов коммутаций и устраняется разрыв электрической цепи нагрузки изза вибрации КС при срабатывании. Чаще всего в качестве жидкого металла используется ртуть, поскольку это единственный чистый металл, находящийся в жидкой фазе при нормальной температуре (температура кристаллизации – 38,9 °С).
На рис. 6.4, д показан ртутный переключающий геркон. В баллон 5 запаяны неподвижные КС 1 и 2, а также подвижный КС 4, изготовленный в виде петли для уменьшения жёсткости и установленный на штенгеле 9. Малая жёсткость КС 4 необходима из-за больших рабочих зазоров, которые требуются для разрыва ртутных мостиков. Ртуть смачивает поверхности всех КС, причём её избыточный объём 8 скапливается в нижней части баллона.
В исходном положении КС4 прижат к неподвижному КС 2 за счёт своей упругости. Для срабатывания геркона сердечники 1 и 2 выполнены несимметричными: КС 2 короче, чем КС 1, и снабжён немагнитной накладкой 3.
Герконы, имеющие избыточный объём ртути, называют резервуарными. Такие ЖМК могут работать только при ограниченном пространственном положении. Обычно отклонение от вертикали допускается не более чем на 30 ... 45°. Существуют и безрезервуарные ЖМК, у которых ртуть
8 8
находится только в капиллярах. Это снимает пространственные ограничения, но сокращает срок службы из-за ограниченного объёма ртути. Например, на рис. 6.4, е показан шариковый геркон, у которого в стеклянном баллоне 5 запаяны две пары неподвижных контактов 1, смоченных ртутью. Замыкание контактов осуществляется при помощи магнитомягкого шарика 4, также смоченного ртутью. Перемещение шарика происходит под действием внешнего магнитного поля от обмоток или от постоянных магнитов. В таком герконе нет возвратной пружины, которая может ломаться из-за усталостных напряжений при большом числе коммутаций (до 109 циклов).
6.2. Реле на МК
Простейшее реле на герконе содержит собственно геркон 1 и обмотку 2 (рис. 6.5). При прохождении тока по виткам обмотки возникает магнитный поток. Картина поля такой магнитной системы рассматривалась в разделе 4 (см. рис. 4.5). Весь магнитный поток делится на три части. Небольшая часть потока проходит только по воздуху и не создаёт электромагнитной силы. Вторая часть потока связана только с одним КС. Этот поток создаёт небольшую силу, действующую на КС в сторону обмотки и препятствующую срабатыванию. Третья часть, как правило, самая большая, проходит через рабочий зазор и связана с обоими КС. Она создаёт рабочую электромагнитную силу, обеспечивающую срабатывание геркона.
1 |
2 |
Рис. 6.5
F |
|
|
|
|
2 |
|
|
|
3 |
|
|
KH |
4 |
|
|
|
|
|
|
F |
|
|
|
MEX |
|
|
|
F |
1 |
|
|
|
|
δ |
|
|
|
|
|
δК |
δСР |
δ1 |
δН |
|
Рис. 6.6 |
|
|
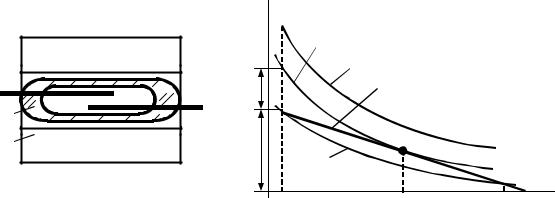
Для анализа работы реле на замыкающем герконе можно воспользоваться формулой Максвелла (5.1) и рассуждениями, приведёнными в разделе (5.1). Тяговая характеристика будет иметь такой же гиперболический вид, как для электромагнита, а противодействующая характеристика будет линейной, но без предварительного натяга, поскольку КС в исходном положении не испытывают никаких сил (не считая пренебрежимо малых сил гравитации и Архимеда). Начальный рабочий зазор δН при этом определяется поверхностями ферромагнитных деталей (см. рис. 6.3, б).
8 9
Тяговые характеристики 1, 2 и 3 для разных токов обмотки, соответственно I1, I2 и I3 показаны на рис. 6.6, причём I1 < I2 < I3. Противодействующая характеристика 4 имеет линейный вид, поскольку описывается законом Гука. Конечный рабочий зазор δК равен двойной толщине немагнитного контактного покрытия.
Поскольку в системе нет предварительного натяга, то КС трогаются с места сразу же, как только в обмотке начинает увеличиваться ток, и двигаются плавно по мере нарастания тока вплоть до точки срабатывания при δСР. Дальнейший рост тока приводит к скачкообразному замыканию КС при зазоре δК. При этом зазоре электромагнитная сила FM равна сумме двух противодействующих сил: силе упругости FMEX и силе контактного нажа-
тия FKH.
Уменьшение тока в обмотке ниже значения I1 (кривая 1 на рис. 6.6) приводит к скачкообразному размыканию КС. Однако рабочий зазор примет значение δ1 < δН (см. рис 6.6). В исходное состояние с начальным зазором δН КС вернутся только после полного отключения тока управления. Это обстоятельство надо учитывать, поскольку меньший рабочий зазор имеет меньше пробивное напряжение.
Отношение тока отпускания к току срабатывания называется коэффициентом возврата (КВ = IOT/ICP). Понятно, что КВ ≤ 1. Номинальный (рабочий) ток должен иметь запас в сравнении с ICP. Отношение номинального тока IH к току срабатывания ICP носит название коэффициента запаса (КЗ = IH/ICP), значение которого выбирается из соображений надёжности, с учётом возможного разброса параметров конструкции, источника питания, температуры окружающей среды.
Магнитная система по рис. 6.5 не оптимальна по чувствительности, поскольку рабочий магнитный поток значительную часть своего пути проходит по воздуху, а не по ферромагнетику (см. рис. 4.5). Применение внешнего (по отношению к обмотке) магнитопровода, во-первых, сокращает потери МДС на воздушных участках, а во-вторых, защищает геркон и реле в целом от воздействия посторонних магнитных полей. Такое реле показано на рис. 6.7.
Геркон 2 установлен внутри обмотки 1. Снаружи обмотка закрыта ферромагнитным кожухом 4, а с торцов двумя ферромагнитными втулками 3. Кожух и втулки выполняют, во-первых, роль внешнего магнитопровода, во-вторых, роль внешнего экрана, защищающего реле от внешних магнитных полей, и, в-третьих, втулки 3 уменьшают магнитное сопротивление паразитных воздушных зазоров между магнитопроводом и КС.
9 0