

ЭМС
.pdfВращающий момент, который может передать муфта, пропорционален коэффициенту трения материала дисков, силе сжатия дисков (электромагнитной силе) и площади поверхности соприкосновения дисков. Увеличение первых двух факторов связано с существенными трудностями, а третий фактор (поверхность соприкосновения) можно увеличить, применив не одну пару дисков, как на рис. 7.1, а несколько пар, установленных в пакет (через один: ведущий – ведомый).
Рис. 7.1
Многодисковые муфты несколько более сложны по конструкции, но зато способны передавать больший вращающий момент, пропорциональный количеству дисков.
Для ещё больших вращающих моментов применяют зубчатые муфты, у которых на поверхностях сцепляющихся дисков имеются мелкие зубья. При срабатывании такой муфты зубья обеспечивают значительно большее усилие сцепления, чем фрикционные диски. Однако сцепление и расцепление зубчатой муфты возможно только при относительно малой разнице в скоростях ведущей и ведомой частей. При большой разнице в скоростях возможна деформация или поломка зубьев и ускоренный их износ.
Электромагнитная порошковая муфта осуществляет связь между ведомой и ведущей частями с помощью ферромагнитного порошка. Эта связь усиливается при наличии магнитного поля. Ферромагнитный порошок является основной частью наполнителя, расположенного в зазоре между ведущей и ведомой частями муфты. Через этот зазор проходит рабочий магнитный поток, который связывает между собой ферромагнитные
1 0 1
частицы порошка, делая его вязким, как пластилин. Это и обеспечивает передачу вращающего момента.
Порошковые наполнители представляют собой смесь ферромагнитного порошка с разделительной средой (мелкодисперсные порошки окиси цинка, окиси магния, талька, слюды и др). Существуют жидкие наполнители, в которых разделительной средой является минеральное, кремнийорганическое и другие жидкие масла. Разделительная среда уменьшает износ частиц ферромагнитного порошка и предотвращает их слипание. В качестве ферромагнитного порошка используется обычно карбонильное железо с размерами частиц порядка нескольких микрометров.
Порошковые муфты обладают более высоким быстродействием (до единиц миллисекунд), большей частотой переключения, в них отсутствуют изнашивающиеся поверхности. Порошковые муфты используются не только в релейном режиме (включено – отключено), но и для ограничения вращающего момента и управления процессами ускорения и замедления механизмов. Порошковая муфта может работать в режиме постоянного скольжения. Момент, передаваемый ею, почти не зависит от скольжения и практически линейно связан с током в обмотке муфты, поэтому на базе них создаются тормозные устройства, работающие в режиме постоянного торможения. С помощью таких тормозов, снабженных измерителями момента, можно поддерживать постоянной или изменять по заданной программе нагрузку. Порошковые муфты позволяют решать специальные задачи привода. В частности, в приводах большой мощности в качестве сцепных муфт и тормозов при тяжелых условиях пуска, в системах регулирования натяжения нити в текстильных машинах, арматурно-навивочных машинах, в приводах рулей, лентопротяжных механизмов и т. д.
При одинаковых передаваемых мощностях и моментах порошковые муфты по габаритам и массе обычно несколько больше, чем фрикционные и зубчатые. Кроме того, они не могут работать при больших скоростях, поскольку возникающие центробежные силы становятся соизмеримыми с электромагнитными силами. При этом теряется управляемость муфтой. Наполнитель муфты имеет ограниченный срок службы (обычно несколько сотен часов), по истечении которого требуется его замена.
7.2. Магнитные опоры
Магнитные опоры применяют для создания подшипниковых узлов, рассчитанных на большие скорости, при малых потерях и больших ресурсах. В металлургии бестигельная плавка свехчистых металлов также осуществляется при отсутствии механического контактирования с расплавленным металлом. Подобные задачи решаются с применением магнитных или электростатических полей.
1 0 2
Идеальная опора должна обеспечить левитацию (свободное парение) объекта, суть которой состоит в том, что объект должен находиться в состоянии устойчивого или нейтрального равновесия вдоль любой оси координат. В соответствии с теоремой Ирншоу статическая система тел, притягивающих или отталкивающих друг друга с силой, обратно пропорциональной квадрату расстояния между ними, не может находиться в состоянии устойчивого равновесия. Поскольку сила тяжести, электростатическая и электромагнитная силы подчиняются закону обратного квадрата, то в системе, содержащей постоянные магниты, ферромагнитные тела, электростатические заряды, невозможна левитация.
Позднее Браунбек доказал, что система, в которой действуют статические гравитационное, магнитное и электрическое поля, левитация возможна лишь при наличии тел с относительной диэлектрической проницаемостью ε < 1 или относительной магнитной проницаемостью μ < 1. Поскольку в настоящее время неизвестны материалы с ε < 1, то в электростатическом поле левитация невозможна.
Встатическом магнитном поле левитацию можно осуществить, если хотя бы часть системы выполнена из диамагнетика (μ < 1) или из сверхпроводника (μ = 0). Магнитное поле не проникает внутрь сверхпроводника, находящегося в сверхпроводящем состоянии (эффект Мейсснера), поэтому он является идеальным диамагнетиком. В остальных случаях левитация возможна только в динамических режимах, например в индукционном подвесе. Во многих случаях не требуется идеальная опора с полной левитацией по всем осям координат. В них обеспечивается устойчивое равновесие лишь вдоль направления нагрузки, что может быть достигнуто различными способами.
На рис. 7.2, а показана опора на постоянных магнитах, воспринимающая осевую нагрузку. Два кольцевых постоянных магнита 1 и 2, намагниченных аксиально, установлены соосно (причём подвижный магнит 2 внутри неподвижного магнита 1) и разноимёнными полюсами навстречу друг другу. Магнит 2 закреплён на валу 4, который и воспринимает осевую нагрузку, поскольку смещению магнита 2 в осевом направлении препятствует притяжение разноимённых и отталкивание одноимённых полюсов магнитов 1 и 2. Таким образом, в осевом направлении обеспечивается устойчивое равновесие.
Врадиальном направлении у такой опоры равновесие неустойчивое. Выход из неустойчивого равновесия исключается за счёт механических подшипников 3. Поскольку опора не нагружена в радиальном направлении, то механические подшипники 3 не имеют существенного трения и износа.
При необходимости компенсации радиальной нагрузки применяются радиальные опоры (рис. 7.2, б). Опора состоит из таких же магнитов 1 и 2,
1 0 3
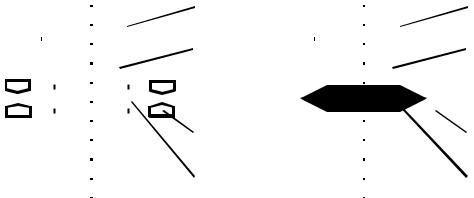
как и аксиальная, но магниты установлены одноимёнными полюсами навстречу друг другу.
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
||
|
|
N |
|
S |
|
|
|
N |
|
S |
||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
2 |
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
S |
|
N |
|
|
|
|
N |
|
S |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
N |
|
|
|
|
|
|
N |
|
S |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
3 |
||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
S |
4 |
|
|
|
N |
|
S |
4 |
||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
Рис. 7.2 |
|
б) |
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из-за отталкивания одноимённых полюсов обоих магнитов подвижный магнит 2, установленный на валу 4, центрируется внутри неподвижного магнита 1. То есть, такая опора создаёт устойчивое равновесие магнита 2 в радиальном направлении. В осевом направлении магнит 2 находится в неустойчивом равновесии. Выход из неустойчивого равновесия исключается за счёт механических подшипников 3. Поскольку рассматриваемая опора имеет лишь радиальную нагрузку, то аксиальные механические подшипники 3 не имеют существенного трения и износа.
Как уже указывалось, полную левитацию может обеспечить диамагнитная опора. Её принцип действия состоит в том, что диамагнитный объект стремится выталкиваться из неравномерного магнитного поля. Т.е. он ведёт себя противоположным образом по сравнению с ферромагнетиком: в точках с максимальным значением модуля магнитной индукции у диамагнетика неустойчивое равновесие, а в точках с минимальным значением (в том числе и с нулевым) – устойчивое.
Если создать магнитное поле с особой точкой (в ней индукция равна нулю), то для диамагнитного объекта она будет точкой устойчивого равновесия по всем направлениям, т.е. точкой левитации. Для стабилизации подвешенного объекта необходимо обеспечить по возможности максимальное усилие, возвращающее диамагнетик, при смещении его из точки левитации. Для этого магнитное поле должно иметь максимально возможный градиент в области особой точки. Магнитные системы с особыми точками были рассмотрены в разделе 4. Это системы, показанные на рис. 4.7, а (точка О), рис. 4.7, б и в (точка А), рис. 4.11, а (точки Б, и Г), рис. 4.11, б, в и г (точка О). Возможны также и другие магнитные системы.
Однако следует иметь в виду, что относительная магнитная проницаемость реальных диамагнетиков очень мало отличается от единицы (см.
1 0 4
раздел 1.2). Поэтому даже для компенсации лишь собственного веса диамагнетика требуются поля с очень большим градиентом. Это ограничивает область применения диамагнитных опор малыми усилиями.
Более эффективны динамические опоры, примером которых является индукционная опора. Устроена эта опора аналогично диамагнитной с той лишь разницей, что магнитное поле должно быть переменным, а подвешиваемый объект должен быть немагнитным и электропроводным.
В электропроводном теле, помещённом в переменное магнитное поле, индуцируются вихревые токи (см. раздел 1.5). Если магнитное поле неравномерное, то за счёт взаимодействия поля и вихревых токов возникает сила, выталкивающая тело из поля. Таким образом, электропроводный объект в переменном магнитном поле ведёт себя так же, как диамагнетик в постоянном (и в переменном тоже).
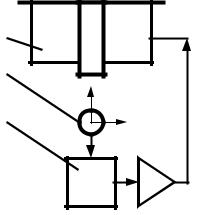
Ещё одним примером динамических опор является электромагнитная опора с внешней системой стабилизации (рис. 7.3). Электромагнит 4 удерживает ферромагнитное тело 3 в состоянии левитации. Магнитное поле электромагнита (рис. 4.3, а) в радиальном направлении r (рис. 7.3) распределено таким образом, что точка с максимальной индукцией расположена на оси z. Таким образом, устойчивое равновесие тела 3 в радиальном направлении обеспечивается естественным образом за счёт конфигурации магнитного поля.
4 |
|
3 |
z |
|
|
2 |
r |
 1
1
Рис. 7.3
Вдоль оси z устойчивость поддерживается за счет системы стабилизации, состоящей из датчика положения 2 и усилителя 1. Если подвешенное тело 3 опускается вниз, то датчик 2 увеличивает свой выходной сигнал, который усиливается и поступает в обмотку электромагнита 4. За счёт увеличения тока в обмотке возрастает электромагнитная сила, возвращающая тело 3 на прежнее место. И наоборот, при смещении тела 3 вверх датчик 2
1 0 5
ослабляет выходной сигнал, поэтому ток в обмотке и электромагнитная сила становятся меньше, а тело 3 опускается в прежнее положение.
Электромагнитные опоры с внешней системой стабилизации применяют при малых перемещениях подвешиваемого тела. В некоторых конструкциях применяют стабилизацию по двум или даже по трём осям координат
7.3. Магнитные редукторы
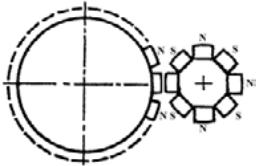
На рис. 7.4 показано устройство простейшего магнитного редуктора с прямым зубом. Он состоит из двух магнитных шестерён разного диаметра, выполненных в виде магнитных систем с чередующимися полюсами прямоугольных постоянных магнитов. Отталкивание одноимённых полюсов и притяжение разноимённых обеспечивает магнитное, бесконтактное зацепление шестерён и передачу движения с ведущей шестерни на ведомую.
Рис. 7.4
Существует много конструктивных решений магнитных редукторов, в том числе редукторы с дугообразным зубом, червячные, планетарные, дисковые редукторы [16] и др.
Магнитные редукторы предназначены в основном для замены механических зубчатых редукторов в быстроходных передачах, не допускающих смазки. Из-за отсутствия зубцового соприкосновения магнитные редукторы имеют более высокий КПД, ресурс и низкий уровень шума.
1 0 6
8.МЕТОДИЧЕСКИЕ УКАЗАНИЯ
КВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ ПО ДИСЦИПЛИНЕ «ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ » ДЛЯ СТУДЕНТОВ НАПРАВЛЕНИЯ 140500
8.1. Проектирование и расчёт броневого электромагнита постоянного тока
Каждый студент получает индивидуальный вариант задания. Исходные данные для расчёта определяются из табл. 8.1 по двум цифрам номера варианта. Для всех вариантов температура окружающей среды TО = 30°С; материал магнитопровода – сталь электротехническая марки 1511.
|
|
|
|
|
|
|
|
Таблица 8.1 |
|
Исходные данные по первой |
|
Исходные данные по второй |
|||||||
|
цифре варианта |
|
|
цифре варианта. |
|||||
Цифра |
|
FMH, H |
|
XЯ, мм |
|
Цифра |
UH, B |
|
TД, °C |
1 |
|
2 |
|
3,5 |
|
1 |
6 |
|
90 |
2 |
|
4 |
|
2,0 |
|
2 |
12 |
|
90 |
3 |
|
10 |
|
2,0 |
|
3 |
24 |
|
90 |
4 |
|
10 |
|
1,5 |
|
4 |
48 |
|
90 |
5 |
|
30 |
|
2,0 |
|
5 |
110 |
|
90 |
6 |
|
90 |
|
2,5 |
|
6 |
110 |
|
105 |
7 |
|
90 |
|
1,6 |
|
7 |
48 |
|
105 |
8 |
|
100 |
|
1,0 |
|
8 |
24 |
|
105 |
9 |
|
200 |
|
1,0 |
|
9 |
12 |
|
105 |
10 |
|
50 |
|
5,0 |
|
10 |
6 |
|
105 |
11 |
|
50 |
|
3,5 |
|
|
|
|
|
12 |
|
4 |
|
3,0 |
|
|
|
|
|
13 |
|
6 |
|
2,5 |
|
|
|
|
|
14 |
|
8 |
|
1,0 |
|
|
|
|
|
15 |
|
20 |
|
2,4 |
|
|
|
|
|
В техническом задании на проект обычно указываются ход якоря XЯ,
равный разности между начальным и конечным рабочими зазорами
(XЯ = δН - δК); электромагнитная сила FMН, развиваемая электромагнитом при начальном рабочем зазоре δН; род тока (постоянный или переменный); номинальное напряжение питания UН; температура T0 окружающей среды; допустимая температура нагрева TД ; материал магнитопровода.
Расчёт состоит из двух этапов. Во-первых, проектный расчёт, где по приближенным соотношениям определяются геометрические размеры и
1 0 7

обмоточные данные электромагнита. И, во-вторых, поверочный расчёт, где рассчитываются уточненные характеристики спроектированного устройства, которые сравнивают с заданными. Если обнаруживается существенная разница, то проводят корректировку конструкции электромагнита.
Исходными данными при выполнении курсовой работы являются электромагнитная сила FMH, развиваемая при начальном рабочем зазоре; ход якоря XЯ; номинальное напряжение UН питания постоянного тока; допустимая температура нагрева TД; температура окружающей среды TO = 30°С и материал магнитопровода – сталь электротехническая марки
1511.
8.1.1 Проектный расчёт
Проектирование проводится на основе упрощенных соотношений без учёта магнитного сопротивления стали, потоков выпучивания и рассеяния. Выбор типа электромагнита и определение его размеров можно производить в зависимости от значения конструктивного показателя по выражению (5.5), в котором зазор δН = XЯ + δК, а δК – конечный рабочий зазор, который в данном расчёте можно принять как неплотность прилегания якоря
(δК = 0,05 мм).
Конструкцию броневого электромагнита можно использовать в диапазоне 380 < ПК < 28000. В зависимости от конкретного значения ПК по таблице 5.2 [6] выбирается один из трёх вариантов конструкции: 1 – якорь и стоп конические с углом при вершине 2α = 60° (см. рис. 5.5); 2 – якорь и стоп конические с углом при вершине 2α = 90°; 3 – плоские якорь и стоп
(2α = 180°).
Диаметр dЯ якоря и стопа можно определить из формулы (5.1) так:
dЯ = |
8μ0 |
|
FMH |
, |
(8.1) |
π |
|
||||
|
|
Bδ |
|
||
где Вδ - индукция в рабочем зазоре, которая определяется из табл. 5.2 по значению ПК (следует учесть, что меньшие значения Bδ соответствуют меньшим значениям ПК). Далее значение dЯ округляется по ГОСТ, с учётом нового выбранного диаметра dЯ уточняется площадь сечения якоря SЯ = (π dЯ2)/4, по формуле (5.6) – значение индукции в рабочем зазоре Вδ.
Длина катушки lК для длительного режима работы определяется из формулы (5.7), в которой примите KЗ = 1,5...2,0; KП = 1,2...1,5;
ρ = 2,2 10-8 Омм; KЗМ = 0,45...0,65; KТ = 9...14 Вт/(м2 °С). Следует учесть, что более толстый провод, используемый при низких напряжениях UН, имеет
большее значение KЗМ; маленькие катушки, рассчитанные на питание слабосильных и короткоходовых электромагнитов, имеют большее значение KT, а коэффициент КП выбирается меньшим, если при проектировании задают болеетолстыефланцыикожух (размеры f и a нарис. 5.5).
1 0 8
Далее определяется hК = lК/n. Значения lК и hК округлить. Катушка со всех сторон имеет наружную изоляцию толщиной 1...2 мм. С учётом этого определяют внутренние диаметры катушки dК, кожуха dА и его длину lА.
Сечения фланцев и кожуха должны быть больше сечения якоря. Тогда a > SЯ / (πdA), f > dЯ / 4. Кроме того, по технологическим соображениям a ≥ 1мм, f ≥ 2 мм.
Длину воротничка lВ выбирают по возможности большей (выбрать lВ = (1...1,5) dЯ ), а зазор C минимальным (принять C = 0,1 мм).
Для выбора длины стопа lТ необходимо учесть характер требуемой тяговой характеристики. Поскольку в задании таких требований нет, то мож-
но принять lТ = (0,1...0,3) lК.
Выполнение якоря и стопа конической формы возможно в двух вариантах: либо, как на рис. 5.5, стоп с коническим выступом, а якорь с коническим углублением, либо, наоборот, выступ у якоря, а углубление у стопа. Оба варианта практически равноценны с точки зрения электромагнитных характеристик. Однако первый вариант (см. рис. 5.5) предпочтительнее, как более быстродействующий, поскольку подвижный якорь с углублением легче и поэтому быстрее разгоняется. Размеры lТ, а, dА, lА, f и lВ округлить по ГОСТу.
При расчёте обмоточных данных можно воспользоваться формулами
(5.9) – (5.13).
8.1.2. Поверочный расчёт
При проектировании использовались упрощенные расчётные соотношения, поэтому проводят поверочный расчёт для определения уточнённых характеристик уже спроектированного электромагнита. Настоящая методика позволяет учесть магнитное сопротивление стали, потоки выпучивания и рассеяния. Для поверочного расчёта необходим эскиз со всеми размерами магнитной системы и обмоточные данные. Одним из методов поверочного расчёта может быть цепевой метод. По эскизу магнитной системы составляется схема магнитной цепи (см. раздел 5.6). МДС катушки и поток рассеяния между якорем и кожухом, а также между стопом и кожухом являются распределёнными по длине якоря и стопа. Схема составляется с учётом разбиения якоря и стопа на участки и замены распределённых величин сосредоточенными для каждого участка. Например, если якорь разбить на два участка, а стоп считать коротким, то схема магнитной цепи будет иметь вид, как на рис. 8.1.
На схеме по рис. 8.1: Λδ – магнитная проводимость рабочего зазора;
ΛE – магнитные проводимости стыков |
между фланцами и кожухом; |
ΛC – магнитная проводимость паразитного зазора между якорем и ворот- |
|
ничком; ΛD – магнитная проводимость |
рассеяния; ΛЯ1, ΛЯ2 – магнитные |
проводимости стали соответственно в первом и во втором участке якоря. 1 0 9
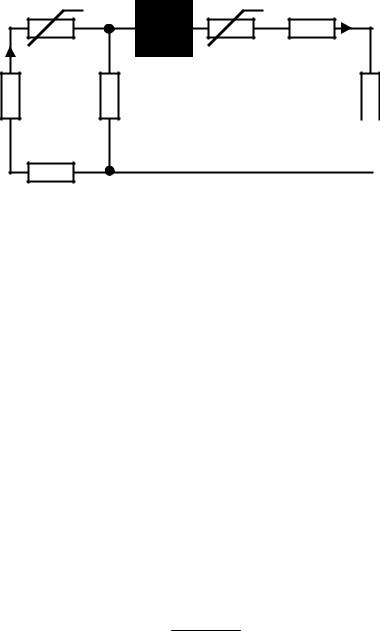
Сопротивление стали фланцев и кожуха не учтено, т.к. их сечение больше, чем сечение якоря.
ФЯ |
ΛЯ2 |
ΛЯ1 |
|
ΛC |
Iw |
|
ΛD |
|
|
|
|
|
ΛE |
|
Λδ Фδ
ΛE 
Рис. 8.1
Далее задача сводится к вычислению рабочего потока Фδ, проходящего через рабочий зазор, при заданных Iw и всех геометрических размерах. Цепь нелинейна, т.к. значения ΛЯ1 и ΛЯ2 зависят от потоков, проходящих через них. Расчёт проводится методом последовательных приближений в следующей последовательности.
1. Вычисляют значения проводимостей воздушных промежутков по геометрии магнитопровода [6, 8]: Λδ – проводимость рабочего зазора с учётом потоков выпучивания, ΛC – проводимость паразитного зазора между воротничком и якорем, ΛE – проводимость паразитного зазора между фланцами и кожухом и ΛD – проводимость рассеяния.
|
2 |
|
|
|
|
|
|
|
|
|
π dЯ |
+0,75 dЯ − |
0,175 dЯ |
; |
|||||
Λδ = μ0 |
|
|
|
|
|||||
2 |
2 |
||||||||
|
4 δ Sin α |
|
|
|
|
Sin α |
|
|
|
ΛC = μ0 |
|
2π lЯ |
|
; |
|
|
|||
ln[(dЯ + 2C)/ dЯ ] |
|
|
|||||||
|
ΛE = μo |
π da |
a |
; |
|
|
|
|
|
|
e |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
ΛD = μo (2π lЯ ). ln dA / dЯ
(8.2)
(8.3)
(8.4)
(8.5)
В формуле (8.2) δ – текущий рабочий зазор. Сначала задать δ = δН. В формуле (8.4) e – неплотность прилегания фланцев с кожухом. Можно принять e = 0,01 мм.
2. Для вычисления проводимостей ΛЯ1 и ΛЯ2 задаются предварительными (в нулевом приближении) значениями индукции в соответствующих участках якоря. Например, ВЯ1 = 2 Тл, ВЯ2 = 1,8 Тл. Далее по кривой намагничивания материала магнитопровода определяют напряжённость поля НЯ1 и НЯ2. Проводимости участков якоря вычисляют по формулам:
1 1 0