

10. Импульсные преобразователи в электроприводе.
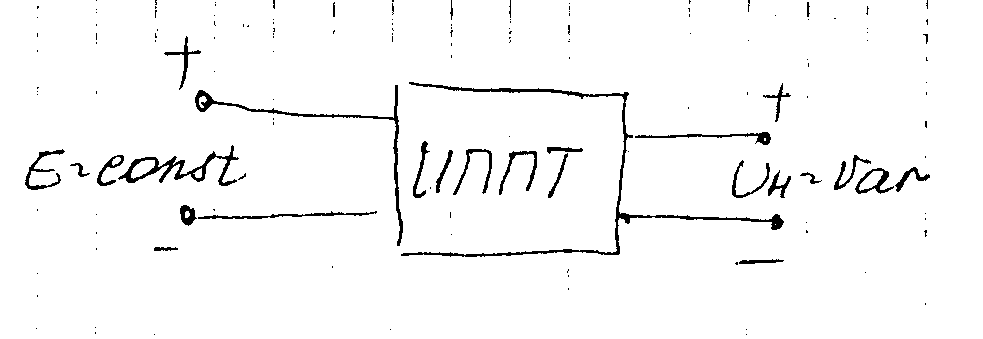
ИППТ предназначены для преобразования тока по величине. Они состоят из электронных ключей на тиристорах или транзисторах, и могут быть нереверсивные и реверсивные.
Применяются в быстродействующих ЭП
По принципу действия делятся на 3 группы:
ИППТ с ШИМ
ИППТ с ЧИМ
ИППТ с КИМ (комбинированный ИМ)
![]()
![]() fм
= 2 –
3 кГц.
fм
= 2 –
3 кГц.
Передаточная функция соответствует апериодическому звену
![]()
Наибольшее распространение получили: ИППТ с ШИМ, из за простоты управления и фильтрации выходного напряжения.
![]() -
частота
-
частота![]()
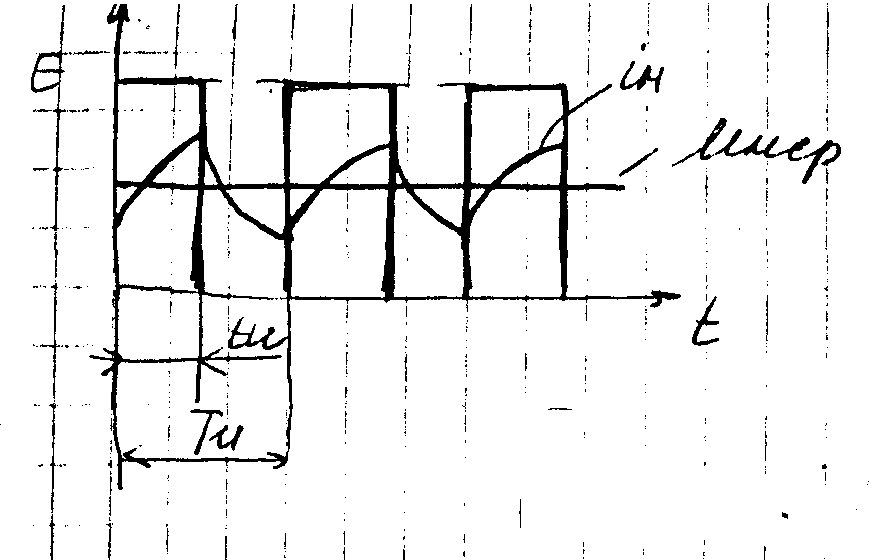
При ШИМ изменяется только длительность импульсов tи
При ЧИМ изменяется период и частота следования импульсов (Ти и fи)
При КИМ изменяется и длительность импульсов (fи), и период (Ти)
Рассмотрим простейшую схему ИППТ на тиристорах.
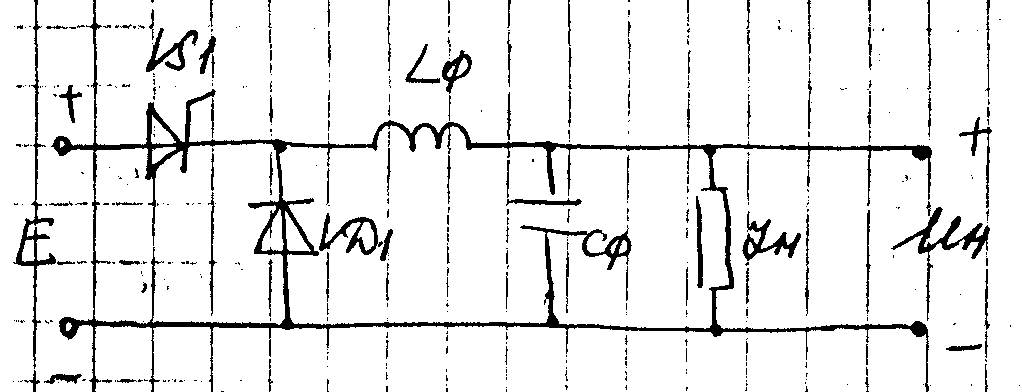
Для сглаживания выходного напряжения чаще всего используют LC - фильтры
Диод VD1 обеспечивает протекание тока нагрузки при запирании тиристора VS1.
Ток изменяется по экспоненте с постоянной времени, равной:
![]()
11. Общие принципы управление и классификация систем управления электроприводом.
Управление в ЭП это – организация преобразования электрической энергии в механическую энергию, при котором реализуется требования алгоритма функционирования и изменения управляемых координат.
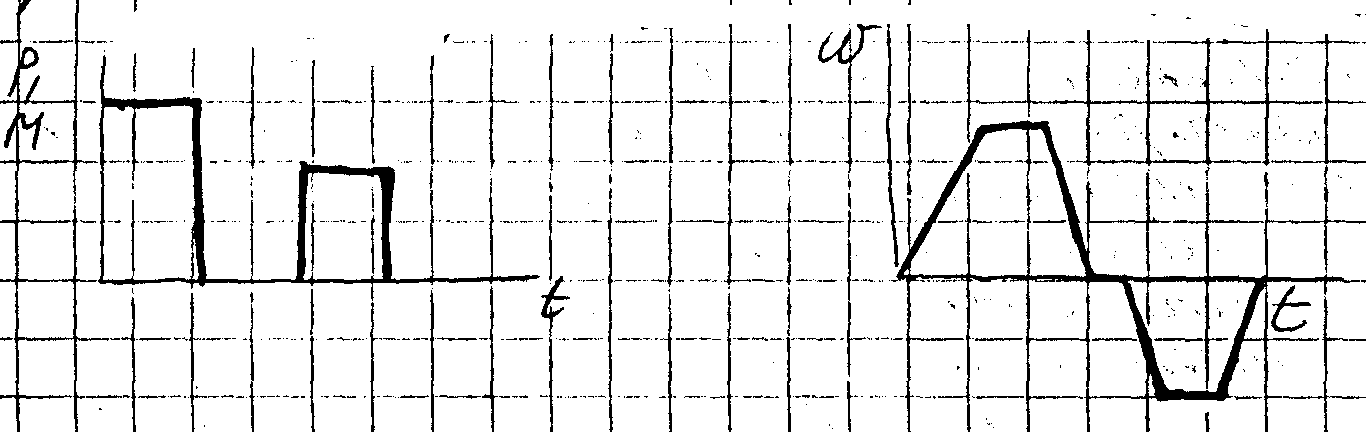
Алгоритм функционирования определяется требуемым характером технологического процесса. Он может быть представлен в виде блок-схемы алгоритма, словесного описания, а также в виде нагрузочных диаграмм и тахограмм.
Н агр.
Диаграмма тахограмма
агр.
Диаграмма тахограмма
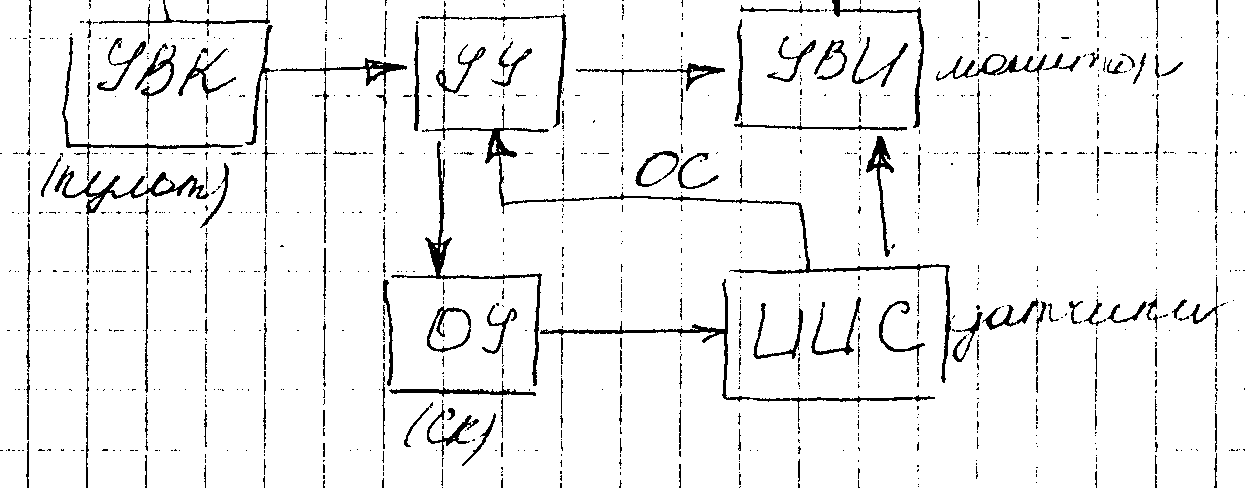
Система управления электроприводом это совокупность элементов информационного канала участвующего в управлении.
Объектом управления является совокупность элементов входящих в силовой канал ЭП.
В систему управления входит:
1. Устройство ввода команд
2. Устройство управления
3. Устройство вывода информации о состоянии электропривода
4. Информационно – измерительная система (датчики)
Классификация систем управления
В зависимости от количества каналов передачи информации, системы управления могут быть:
1. разомкнутыми (без ОС)
2. замкнутыми (с ОС)
3. адаптивными (имеют дополнительные каналы передачи информации для изменения параметров или структуры управляющего устройства).
По характеру входного (задающего) сигнала системы управления бывают:
система стабилизации
следящие системы (входной сигнал изменяется по случайному закону)
система программного управления (управляющий сигнал изменяется по заданной программе в зависимости от времени и текущих координат системы)
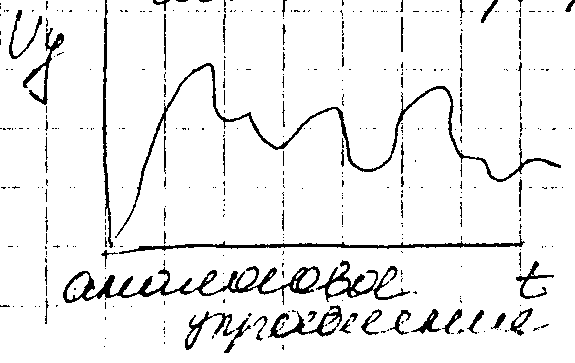
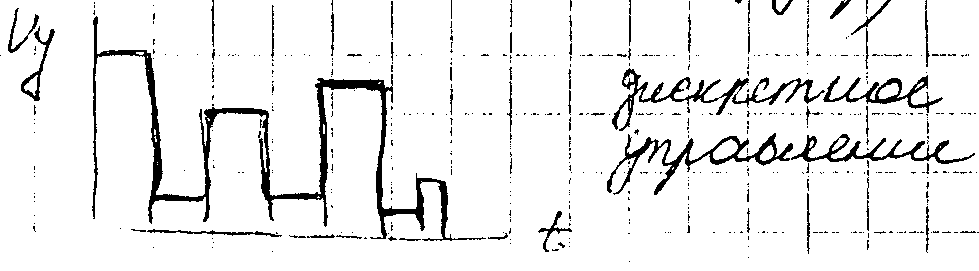
По характеру управляющих сигналов системы могут быть с:
аналоговым управлением
дискретным управлением (управляющие сигналы формируются прерывисто, например в системах микропроцессорного управления)
По виду элементов входящих в систему, системы могут быть:
линейными
нелинейными
По количеству управляемых координат системы могут быть:
одномерными
многомерными
По структурной схеме системы управления могу быть:
одноконтурными
многоконтурными.
12. Элементная база информационного канала. Аналоговые регуляторы электропривода.
До 50-х гг. в разомкнутых системах ЭП примен. В основном, реле и контакторы, а замкнутых – электромашинные усилители.
В 60-х появились дискретные системы управления на диодах и транзисторах. В регулир. ЭП внедрялись машинные усилители.
В 70-х в разомкнутых системах начали применяться интегральные логич. микросхемы для формирования управляющих сигналов. В замкнутых – тиристорные и транзисторные преобразователи.
С 80-х – разомкнутые и замкнутые системы с МП – управлением и гибкой логикой функционирования. Такое изменение в элементной базе информационного канала привело к увеличению качества и точности управления, повышению КПД и надежности, снижению массы и стоимости оборудования. В соврем. оборудовании находят применение все элементы информационного канала.
2. Аналоговые регуляторы на операционных усилителях. см. ЭА и МПУ.
3.Цифровые интегральные микросхемы.