

Дисциплина «Электрооборудование промышленности» содержание
1. Электропривод как система. Структурная схема электропривода (эп).
ЭП – это управляемая Эл. Механическая система для преобразования электрической энергии в механическую и автоматизации технологических процессов.
ЭП как система состоит из 2х каналов: силовой канал ЭП предназначен для передачи и преобразования энергии и состоит из электрической и механической части.
Информационный канал ЭП управляет потоком энергии, производит сбор и обработку данных о состоянии системы и диагностику её неисправностей.
Э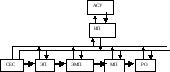 лектрическая
часть силового канала состоит из: системы
электроснабжения(СЭС), электрических
преобразователей (ЭП), и электрической
части электромеханического преобразователя
(ЭМП).
лектрическая
часть силового канала состоит из: системы
электроснабжения(СЭС), электрических
преобразователей (ЭП), и электрической
части электромеханического преобразователя
(ЭМП).
К СЭС относится линии электропередач, аппаратуру защиты и коммутации.
ЭП могут состоять из трансформаторов, электронных и электромеханических преобразователей, преобразователей Эл. Энергии по роду тока, по амплитуде и частоте.
К ЭМП относится электродвигатели постоянного и переменного тока, электромагнитные муфты и тормоза.
Электромеханическая часть силового канала состоит из: ЭМП (ротора), механического преобразователя (МП) редуктора, рабочего органа (РО), технологических установки.
В состав информационного канала входит: автоматизированная система управления (АСУ), предназначена для формирования управляющих сигналов в соответствие с заданной программой и сигналами информационных преобразователей (ИП).
АСУ включают в себя аналоговые и цифровые сигналы, промышленные компьютеры и контроллеры. ИП включают в себя датчики сигналов, их усилители и преобразователи.
ЭП обеспечивает сопряжение АСУ с силовым каналом.
Истории и тенденции развития электропривода
Основные направления развития электропривода.
1) использование более совершенных электродвигателей. Используются бесконтактные, высокомоментные двигатели с более высоким КПД при меньшей массе.
2) совершенствование полупроводниковой моментной базы, внедрение новых типов тиристоров и транзисторов.
3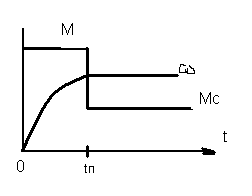 )
расширение функциональных возможностей
электропривода: повышение точности и
быстродействия, улучшение систем
диагностики и защиты.
)
расширение функциональных возможностей
электропривода: повышение точности и
быстродействия, улучшение систем
диагностики и защиты.
4) увеличение объёма информации поступающей в электропривод для улучшения управления.
5) развитие систем цифрового и микропроцессорного управления электроприводом.
6) приближение двигателей к исполнительному органу за счёт упрощения МП (мех. преобразователя)
2. Механические характеристики производственных механизмов электродвигателей.
Общие сведения о механической части. Управление движения ЭП.
1) Выбор математической модели механической части зависит от постановки задачи. Модель механической части должна связывать параметры её элементов с действующими силами и моментами, а также ускорением скоростью и положение рабочего органа технологической установки. При этом делаются определённые допущения. Например, пренебрегают упругостью механической передачи, а также люфтами в ней. В этом случае механическая часть рассчитывается по одномассовой расчётной схеме с суммарными приведёнными к валу двигателя моментами сопротивления Мс, и инерции J.
В быстродействующих замкнутых системах управления электроприводом для обеспечения устойчивости работы приходится рассматривать механическую часть по многомассовой расчётной схеме с учётом люфтов и упругости передачи.