

4. Элементы проектирования электропривода.
Постановка Задачи : 1) в замен устаревшему ЭП разработать современный, с лучшими экономическими и техническими данными; 2) в замен нерегулируемого ЭП данного агрегата применить регулируемый для повышения качества функционирования
3) разработать ЭП, которым нужно заменить имеющийся без модернизации Этапы проектирования: 1) формулировка задачи. Необходимо определить точно требуемые технические характеристики проектируемого объекта и требования к его конструкции; 2) анализ задачи. Определение критериев выбор наиболее лучшего варианта и технических ограничений. Критерии: технически – определяю качество двигателя ЭП;
технико-экономические – надёжность, потребление электроэнергии, масса, габариты, КПД; экономические – стоимость, срок окупаемости затрат, годовая прибыль от внедрения модернизированного ЭП. 3) поиск возможных решений. 4)выбор решения. 5)детальная разработка выбранного решения- выбирается оборудование, проектируется схема и алгоритм работы системы управления, производится конструктивная компоновка узлов и оценка энергетических показателей.
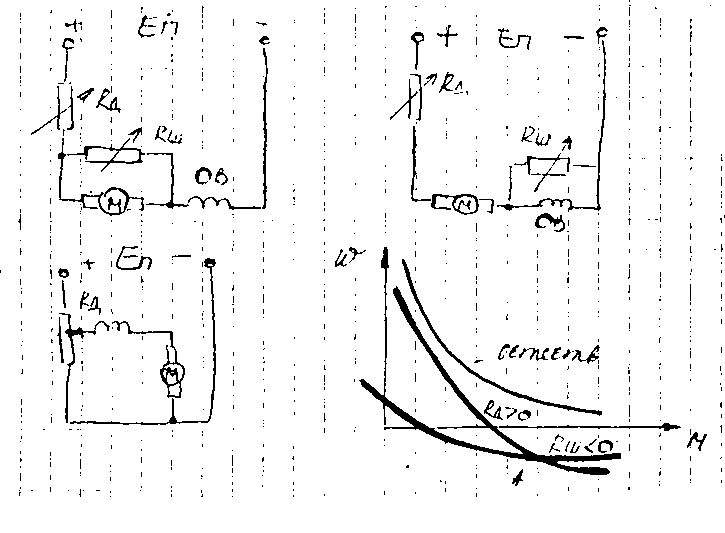
5. Управление координатами в электроприводе постоянного тока при реостатном регулировании.
![]()
Изменением ЭДС преобразователя ↑Еп→↑ω
Увеличением сопротивления (+добавочное R)↑Rд→↓ω
Уменьшением магнитного потока ↓Ф→↑ω (если Мс≤Мном)
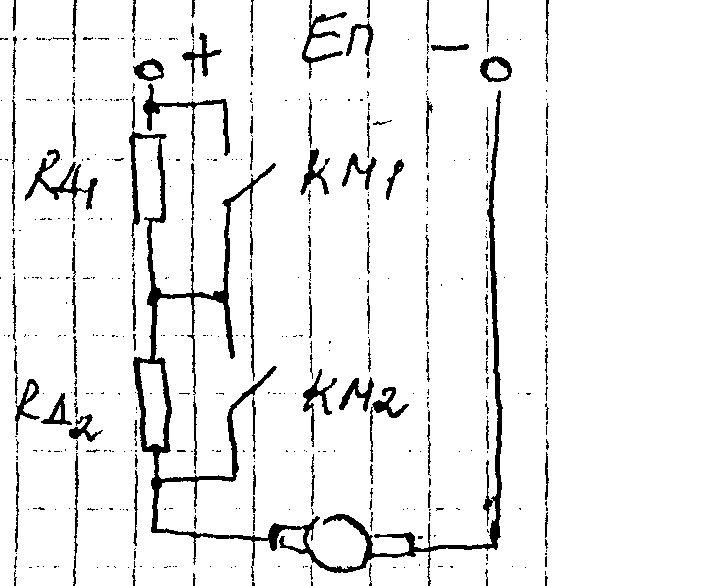
Все эти способы применяются на практике, но каждый из них имеет свои преимущества и недостатки. При реостатном регулировании в цепь якоря включается добавочное сопротивление.
При пуска двигателя скорость увеличивается за счет шунтирования добавочных резисторов контактами контакторов КМ1 и КМ2.
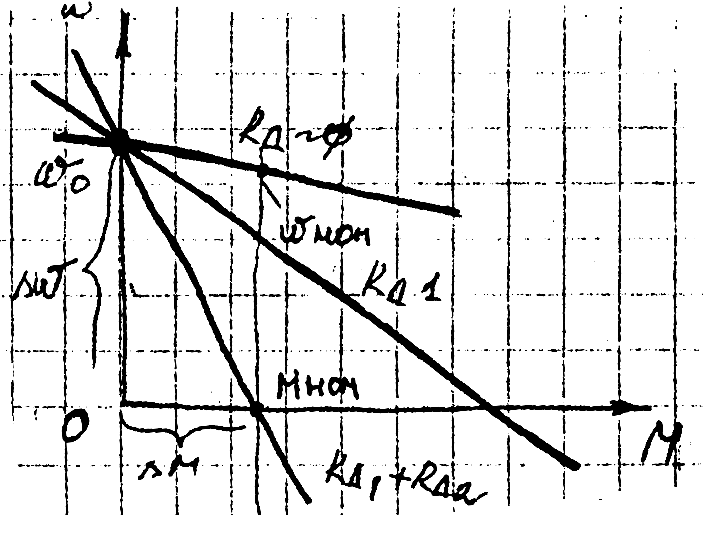
Рассмотрим вид механической характеристики при включении добавочных резисторов в цепи якоря.
![]()
Преимущества:
диапазон регулирования скорости от 0 до ωном.
высокое быстродействие, т. к. постоянная времени якоря ≤≤ пост. времени возбуждения: Тя ≤≤ Тв.
простота реализации
Недостатки:
большие потери энергии, пропорциональные перепаду скорости
![]()
![]()
где Р1-мощность от цепи
Р2-мощность вала
![]()
Уравнение баланса мощностей
Т.о. на малых скоростях большая часть энергии преобразуется в тепло.
2. малая точность регулирования на малой скорости, т. к. снижается жесткость механической характеристики:
![]()
![]()
3. ступенчатость регулирования, для уменьшения ступенчатости применяются электронные ключи, широтно-импульсной модуляции (ШИМ), но это усложняет схему.
Реостатное регулирование применяется в основном, в разомкнутых схемах регулирования, на электротранспорте.
Для повышения жесткости и точности регулирования на малых скоростях можно применять схему с шунтированием якоря.
Рассмотрим как будут изменятся мех. Характеристики при уменьшение сопротивления шунта Rш и постоянном добавочном сопротивлении Rд.
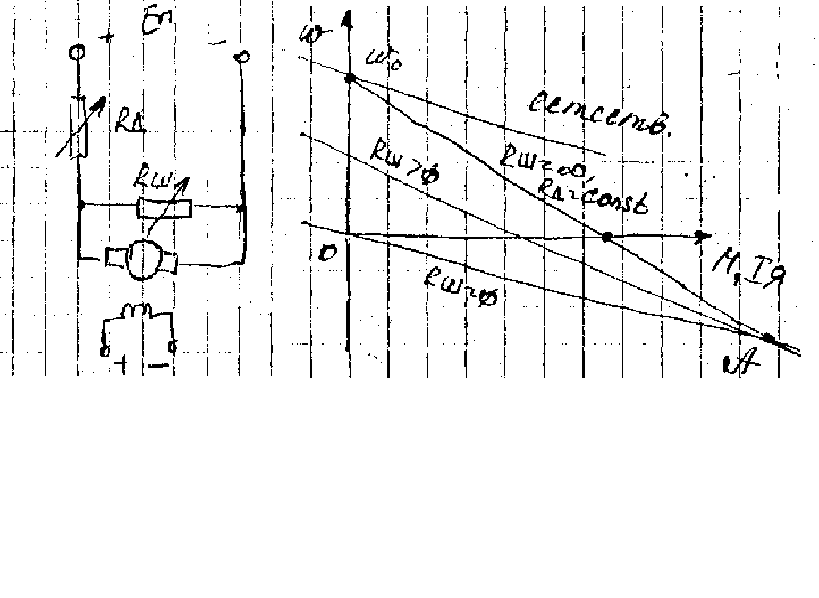
При уменьшении сопротивления шунта характеристика будет поворачивается вокруг точки А, в которой Uя=0 и Iш=0.
Повышается жесткость → повышается точность регулирования.
Т. к. потери энергии увеличиваются многократно данный способ не нашел практического применения.
Рассмотрим схему реостатного регулирования при последовательном возбуждении двигателя.
При реостатном регулировании при пуске двигателей применяются реле времени, скорости, тока или напряжения, для ограничения пускового тока.