

Курс лекций по предмету
«ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ»
Лектор – Бондин О.А.
2010 год
Введение
Роль и значение автоматики.
Автоматика (а) – отрасль науки и техники, охватывающая теорию и практику АУ, а также принципы построения АС и образующих их технических средств.
Работа любого объекта зависит от совокупности ряда возмущений.



Объект рассматривается как «чёрный ящик». Рассматривают обычно статику и динамические системы.
Автоматическим регулированием называется процесс поддержания заданного закона или изменения по заданному закону какой-либо физической величины в системе при воздействии на неё возмущений, осуществляющихся без непосредственного участия человека, с помощью специальных устройств, которые носят название регулятора.
Автоматическое управление (АУ) – это автоматическое осуществление совокупности воздействий, выбранных для достижения поставленных целей.
История развития тау как науки.
В 1765 г. Была изобретена первая система АУ (регулятор), первые АС были детерминированы.
В 1934 г. Была создана Комиссия при Презид. АН СССР, далее была преобразована в Институт автоматики и телемеханики. Всякая СУ состоит из объекта и регулятора, представляющего из себя систему с обратной связью. В 1940-х гг. появилась радиолокационная и импульсная связь. Сначала все системы рассматривались как линейные, затем возникла теория нелинейных СУ; возникла общая ТУ: «Управляй всем, что управляется, а что не управляется – сделай управляемым».
Возникла теория оптимального управления.
Были и существуют аналитические, алгоритмические и смешанные методы.
Классификация сау. Автоматические системы
АИ
САУ СНС




ОС
ЗСАУ РСАУ ИСНС
ПСНС БСНС






САЖУ
С о-е о-ся
Ccтаб. СС ЭР О С С
С Н Н
Н С С
СПрУ С
CAУ – сист. АУ
СНС – самонастр. системы
АИ – априорная (доопытная инф-ция)
Есть АИ САУ;нет АИ
САУ;нет АИ СНС
СНС
СНС – система, использующая рабочую информацию
ЗСАУ – замкнутая САУ
РСАУ – разомкнутая САУ
САЖУ – система автоматического жёсткого управления
Сстаб. – система стабилизации
СПрУ – система программного управления
СС – следящие системы (выходная величина меняется по произвольному закону)
СНС : отсутствует априорная информация
ИСНС – игровые СНС (обязательный выигрыш одной системы и проигрыш другой)
ПСНС – поисковые СНС (используются различные методы автоматического поиска),
например: экстрем. регуляторы.
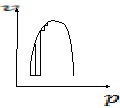
 - скорость
проходки при бурении
- скорость
проходки при бурении
 -
давление
-
давление
Характеристика нестабильна, может перемещаться параллельно самой себе.
Режим поиска, режим захвата, режим рыскания.
Признаки классификации:
линейные, нелинейные
непрерывные, импульсные
оптимальные, неоптимальные
Пример системы стабилизации на примере стабилизатора напряжения

Управление без регулятора:

Управление с регулятором:




Подберём
 так, чтобы
так, чтобы
 ,
где
,
где



 и
и
 называетсястатизмом.
называетсястатизмом.
