

Точность манипуляторов пр.
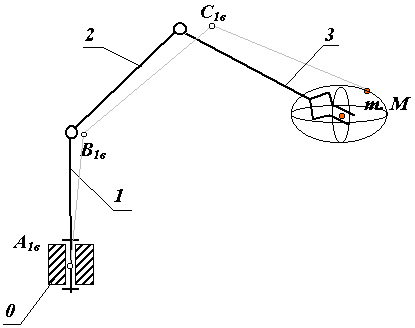
Точность манипуляторов определяется погрешностями позиционирования характеристической точки схвата (точка М) и погрешностями угловой ориентации схвата. Погрешности позиционирования определяются технологическими отклонениями размеров звеньев манипулятора, зазорами в кинематических парах манипулятора и механизмов приводов, деформациями (упругими и температурными) звеньев, а также погрешностями системы управления и датчиков обратной связи. В паспортных данных манипуляторов указывается максимально допустимое отклонение центра схвата манипулятора точки М от ее номинального расположения на множестве возможных конфигураций механизма. В результате погрешностей точка М описывает в пространстве некоторый эллипсоид, который называется эллипсоидом отклонений (рис. 20.10).
|
Рис. 18 |
Промышленные роботы антропоморфного типа.
Промышленные роботы, построенные на базе мехатронных модулей, относятся к типу универсальных роботов, которые могут использоваться при автоматизации различных технологических процессов в машиностроении, деревообрабатывающей промышленности, автомобилестроении и т.п.
Универсальные промышленные роботы антропоморфного типа с различными техническими и геометрическими параметрами могут быть изготовлены из унифицированного набора конструктивно подобных двухкоординатных приводных модулей механотронных узлов.
Модули имеют унифицированные поворотные относительно корпуса фланцы, оси вращения взаимно перпендикулярны.
Создание новых компоновок роботов состоит в наборе требуемых по расчету типоразмеров приводных модулей и в разработке промежуточных корпусов, последовательно соединяющих фланцы выбранных модулей.
Требуемые геометрические параметры манипулятора обеспечиваются за счет формы и размеров промежуточных соединительных корпусов.
Роботы проектируются и изготавливаются по новой технологии, разработанной в ЭНИМС, по индивидуальным требованиям заказчика.
Стоимость зависит от требуемой компоновки робота и значительно ниже зарубежных аналогов.
Стоимость базовой модификации (6-ти координатного ПР) грузоподъемностью 20 кг не выше 12 тыс. у.е.
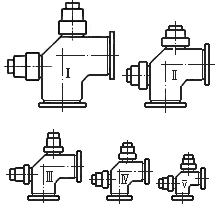
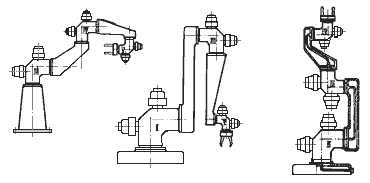
Рис. 19 Принцип модульного исполнения приводных механизмов.
Список литературы
Силовой расчет, уравновешивание, проектирование механизмов и механика манипуляторов: Учебное пособие для студентов смешанной формы обучения / И.Н.Чернышева, А.К.Мусатов,Н.А.Глухов и др.; Под ред. А.К.Мусатова. – М.: Изд-во МГТУ, 1990. – 80с., ил.
Механика промышленных роботов: Учеб. пособие для втузов: В 3-х кн. / под ред. К.В.Фролова, Е.И.Воробьева. – М.: Высш.шк., 1988.
Р.Пол “Моделирование, планирование траекторий и управление движением робота – манипулятора” - М.: Наука, 1976.
Промышленные роботы: Внедрение и эффективность: Пер. с яп. Асаи К., Кигамн С., Кодзима Т. и др. 1987. 384 с.
Промышленные роботы и их применение. Робототехника для машиностроения. Изд.2, перераб. и доп. Белянин П.Н.
Промышленные роботы: Конструирование, управление, эксплуатация. Ямпольский Л.С.