

Лекции по ТАУ3 / 2
.docПараметрический синтез ЗУ в технических системах
Все методы параметрического синтеза можно разбить на две большие группы:
-
Параметрический синтез типовых ЗУ;
-
Параметрический синтез нетиповых ЗУ (корректирующих устройств);
Параметрический синтез типовых ЗУ
Решение задач при типовых законах управления (ТЗУ) сводится к совместному решению системы ММ объекта и типового закона с символьно заданными параметрами настройки, с дальнейшим исследованием совокупной ММ системы и выбором значений коэффициентов настройки, обеспечивающих заданные показатели качества.
Методы решения такой задачи делятся на операторно-алгебраические (с использованием передаточных функций), частотные (с использованием частотных характеристик) и дифференциально-операторные (с прямым решением системы ДУ).
При применении операторно-алгебраических методов используются обычно косвенные показатели качества (постоянные времени, коэффициент колебательности, коэффициент ошибки, соотношение постоянных числителя и знаменателя и т.д.). Поэтому синтез носит приближенный характер и его окончательный результат проверяется по математической системе построением ее реакции на типовые воздействия. При неудовлетворительных результатах синтеза в исходную систему критерия вводится корректировка и синтез повторяется.
Im









Re







Рис.1. Распределение корней на корневой плоскости
Синтез нетиповых ЗУ (корректирующих устройств)
Динамическая коррекция ОУ и СУ
Все задачи коррекции можно разделить на две группы.
-
Коррекция уже существующей, рассчитанной СУ;
-
Коррекция объекта управления или неизменяемой части ОУ для подготовки их к реализации СУ.
Первая задача возникает тогда, когда СУ уже существует. Менять реализованный в ней ЗУ нельзя. Возникает задача дополнить систему одним или несколькими устройствами, которые улучшат ее статические и/или динамические свойства.
Вторая задача. Сущность коррекции статических и динамических свойств неизменяемой части сводится к тому, что зачастую ОУ разрабатываются и реализуются без достаточного учета требований к их динамике как к объектам управления. В связи с этим прежде чем решать задачу синтеза для всей системы целесообразно бывает предварительно решить задачу коррекции статических и/или динамических свойств неизменяемой части. При этом задача синтеза в целом разбивается на ряд последовательных этапов. Сначала корректируются динамические свойства объекта или его составляющие, а в результате получаем корректирующий объект, ММ которого более приспособлена для решения задачи синтеза системы в целом, а затем решается совокупная задача в целом.

![]()


![]()

























![]()
![]()
![]()
![]()
![]()
![]()




![]()
![]() .
.
По структуре действия корректирующих устройств они делятся на:
-
Последовательные корректирующие устройства (КУ);
-
Параллельные КУ;
-
Обратные связи;
-
Комбинированные способы коррекции.
Последовательная коррекция применяется
чаще всего для повышения и снижения
быстродействия, подавления импульсных
процессов и перерегулирования,
колебательности и т.п. Проще всего расчет
осуществлять операторно-алгебраическим
методом и чаще всего этого оказывается
достаточно. Еще одно назначение —
изменение статических свойств, например,
коэффициента передачи
![]() .
.
Параллельная коррекция применяется сравнительно редко, ввиду того, что она подразумевает сложение сигналов реального устройства и корректирующего. Наиболее просто это осуществить при коррекции свойств основного регулятора или других корректирующих устройств.


![]()








КУ






















Коррекция с использованием обратных связей. По сложности и способу расчетов этот вид во многом совпадает с задачей синтеза системы, регулируемой по отклонению. Однако при этом для коррекции могут применяться те устройства, которые для управления по отклонению неприемлемы.
Пример.

![]()































![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()






![]()

![]()


|
|
|
|

Пусть
![]() .
.

![]()


t

![]()
t
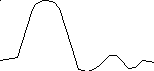



Задача — снизить импульс тока (— — —).
Построить корректирующее устройство,
улучшающее ПП по току, но не меняющее
значения по скорости. Исследуем вопрос
использования пропорциональной
корректирующей ОС, то есть возьмем
![]() .
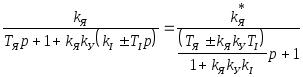
ПФ по каналу управления по
.
ПФ по каналу управления по
![]() и по
и по
![]() имеет следующий вид:
имеет следующий вид:
|
|
(*) |
|
|
|
 .
.
Таким образом, в скорректированной
системе средняя постоянная времени
звена
![]() не меняется, поскольку
не меняется, поскольку
|
|
а коэффициент при «![]() »
увеличивается при уменьшении
»
увеличивается при уменьшении
![]() .
Поэтому задавшись желаемым значением
.
Поэтому задавшись желаемым значением
![]() ,
мы вычисляем желаемые значения
,
мы вычисляем желаемые значения
![]() а получив его, из формул (*) вычисляем
значение
а получив его, из формул (*) вычисляем
значение
![]() .
При этом получим снижение нарастания
ПП, а числитель
.
При этом получим снижение нарастания
ПП, а числитель
![]() не меняется. Только помножается на
не меняется. Только помножается на
![]() .
.
Умножим используемую коррекцию по току. К пропорциональному звену добавим дифференциальную составляющую (ПД — коррекция).




![]()







![]()
|
|
После такой коррекции по току можно дать такое же решение по скорости.
По соотношению со структурой СУ в целом, способы коррекции корректирующего устройства делятся на внутренние и внешние (по информации, используемой для коррекции).
Внутренние устройства коррекции для выработки используют собственные сигналы объекта и системы. Внешние корректирующие устройства используют для выработки корректирующего воздействия измеренные внешние воздействия системы, то есть задающие и возмущающие.
При реализации комбинированных СУ как по возмущению, так и по заданию используют внешние корректирующие устройства.
Синтез ЗУ с использованием желаемых ММ системы.
Отличительной особенностью данных методов является четкое разделение особенностей синтеза на два этапа:
-
Построение желаемой ММ проектируемой системы;
-
Преобразование этой ММ с учетом объекта, функционала в этой системе и получение ММ УУ, то есть закона управления.
Наглядно это можно отобразить так:
ММ ЗУ
ММ ОУ
ММ СУ (желаемая) Z U Y V








Методы решения такой двухэтапной задачи зависят как от критериальной стратегии, так и от математического аппарата, используемого для описания объекта и системы. В соответствии с этим они также делятся на частотные, операторно-алгебраические и дифференциально-операторные методы.
Наиболее распространенный пример частотных методов — это метод желаемых ЛАЧХ, предложенный В. В. Солодовниковым.
Основу этого метода составляет методика построения желаемой ЛАЧХ разомкнутой СУ.
Последовательная частотно-динамическая коррекция замкнутых СУ.
Сущность задачи сводится к тому, что имеется СУ следующего вида:


















![]()
![]()
![]()

![]()
![]()

Наиболее простым и распространенным способом является использование ЛЧХ, поскольку синтезируется последовательное корректирующее устройство, возникает возможность использования ЛЧХ разомкнутой системы. При этом критериальная стратегия строится на косвенных частотных критериях, таких как частота среза, запасы устойчивости по модулю и фазе, порядок астатизма. Кроме того, надо выделить такой показатель, как коэффициент усиления РС.