

Требования к оформлению
Выполненная курсовая работа оформляется в виде пояснительной записки.
Пояснительная записка должна быть написана от руки в соответствии с требованиями ЕСКД к проектно-конструкторской документации. Разработанные программы исследования, схемы моделирования и полученные графические характеристики должны быть распечатаны с помощью использованных пакетов прикладных программ.
В пояснительной записке должны содержаться следующие разделы:
-
титульный лист;
-
задание на курсовую работу;
-
введение;
- расчет передаточных функций элементов САУ и составление ее структурной схемы;
- расчет передаточных функций разомкнутой и замкнутой САУ;
- построение области устойчивости замкнутой САУ методом D- разбиения;
- анализ устойчивости разомкнутой и замкнутой САУ;
- построение логарифмических частотных характеристик исходной системы, желаемой ЛАЧХ, ЛАЧХ корректирующего устройства и расчет его
параметров;
-
расчет схемы аналоговой реализации корректирующего устройства и структурная схема скорректированной САУ;
-
определение коэффициентов ошибок;
-
моделирование САУ и расчет переходных характеристик;
-
заключение, сравнение полученных характеристик САУ с заданными требованиями;
-
список использованной литературы;
-
приложения.
Приложения должны содержать:
-
разработанные программы исследования;
-
область устойчивости замкнутой системы, построенную методом D- разбиения;
-
кривые Михайлова, годографы Найквиста для исходной и скорректи рованной систем;
-
логарифмические частотные характеристики (ЛАЧХ и ЛФЧХ исход ной САУ; желаемую ЛАЧХ; ЛАЧХ корректирующего устройства);
-
схемы моделирования исходной и скорректированной систем;
-
переходные характеристики для исходной и скорректированной сис тем.
Список литературы
1. Юревич Е.И. Теория автоматического управления. Учебник для сту дентов вузов. Изд. 3-е. - СПб.: БХВ-Петербург, 2007 - 560 с.
-
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. Изд. 4-е. - СПб.: Профессия, 2004. - 752 с.
-
Теория автоматического управления: учебник для студентов вузов. Изд. 2-е. Часть 1. Теория линейных систем автоматического управления / под ред. А. А. Воронова. - М.: Высшая школа, 1986. - 367 с.
-
Теория автоматического управления. Учебник для вузов. Изд. 2-е / под ред. А. В. Нетушила. - М.: Высшая школа, 1976. - 400 с.
-
Топчеев Ю.И. Атлас для проектирования систем автоматического регулирования: Учебное пособие для втузов. - М.: Машиностроение, 1989. - 752 с.
-
Певзнер Л.Д. Практикум по теории автоматического управления: Учебное пособие. - М.: Высшая школа, 2006. - 590 с.
-
Сборник задач по теории автоматического регулирования и управле ния / Под ред. В.А. Бесекерского. - М.: Наука, 1978. - 512 с.
-
Васильев Д.В., Чуич В.Г. Системы автоматического управления. Примеры расчета. - М.: Высшая школа, 1967. - 419 с.
-
Андриевский, Б. Р. Избранные главы ТАУ с примерами на языке MATLAB / Б. Р. Андриевский, А. Л. Фрадков. - СПб.: Наука, 1999. - 467 с.
10. Лазарев, Ю. Ф. Моделирование процессов и систем в MATLAB.
Учебный курс / Ю. Ф. Лазарев. - СПб.: Питер; Киев: Издательская группа BHV, 2005.-512 с.
-
Петунии В.И., Юлдашбаев Ш.А. Основы автоматического управле ния / Лабораторный практикум по дисциплине «Основы автоматического управления». - Уфа: Уфимск. гос. авиац. техн. ун-т, 2007. - 56 с.
-
Петунии В.И. Интерфейс системы MATLAB / Методические указа ния к лабораторной работе по дисциплинам «Основы автоматического управления» и «Цифровая обработка сигналов». - Уфа: Уфимск. гос. авиац. техн. ун-т, 2006. - 29 с.
САУ№1
Следящая система включает в себя датчик рассогласования, выполненный на сельсине датчике (СД) и сельсине приемнике (СП), которые работают в трансформаторном режиме, предварительный усилитель (ПУ), магнитный усилитель (МУ), исполнительный двигатель (ИД), осуществляющий через редуктор (Р) поворот исполнительной оси объекта управления, механически связанной с ротором СП.

Система
описывается следующими уравнениями:
датчик
рассогласований![]()
предварительный
усилитель![]() магнитный
усилитель
магнитный
усилитель
исполнительный двигатель
редуктор![]()


Параметры системы приведены в таблице.
САУ№2
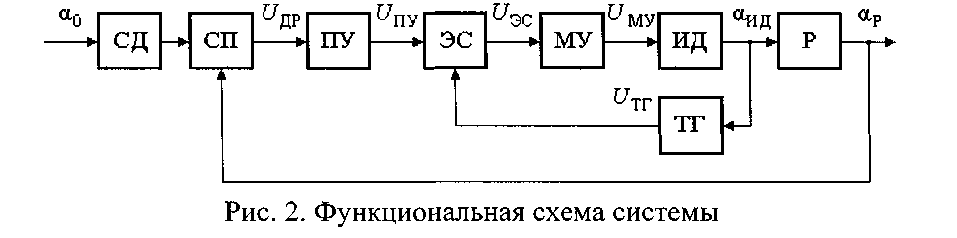
Следящая система включает в себя датчик рассогласования, выполненный на сельсине датчике (СД) и сельсине приемнике (СП), которые работают в трансформаторном режиме, предварительный усилитель (ПУ), магнитный усилитель (МУ), исполнительный двигатель (ИД), осуществляющий через редуктор (Р) поворот исполнительной оси управляемого объекта и ротора СП. МУ и ИД охвачены местной обратной связью с помощью тахогенера-тора (ТГ) и элемента сравнения (ЭС).
Система
описывается следующими уравнениями:
датчик
рассогласований![]()
предварительный
усилитель![]() элемент
сравнения
элемент
сравнения![]()
магнитный
усилитель '.![]() исполнительный
двигатель
исполнительный
двигатель
тахогенератор![]()
редуктор![]()
Параметры системы приведены в таблице.

САУ№3
Система
регулирования напряжения включает в
себя элемент сравнения (ЭС),
предварительный (ПУ) и электромашинный
(ЭМУ) усилители, генератор
(Г) и делитель напряжения (ДН) в цепи
отрицательной обратной связи.
Система
описывается следующими уравнениями:
элемент
сравнения![]()
предварительный
усилитель электромашинный
усилитель
электромашинный
усилитель
генератор![]()
делитель
напряжения![]()
Параметры системы приведены в таблице.

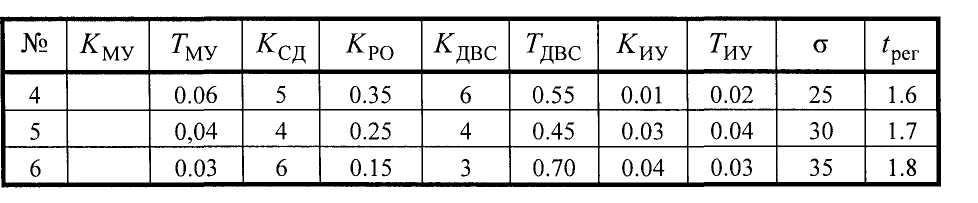
САУ № 4
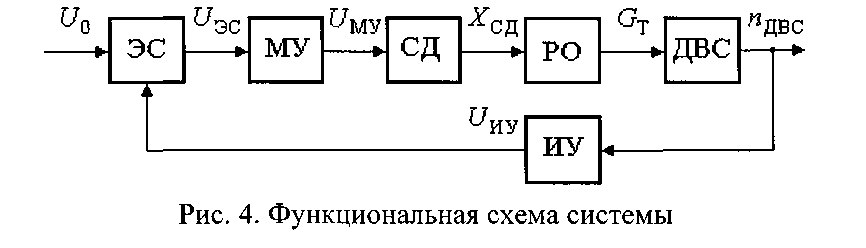
Система автоматического регулирования частоты вращения двигателя внутреннего сгорания (ДВС) включает в себя ДВС как объект регулирования, измерительное устройство (ИУ) в цепи отрицательной обратной связи, элемент сравнения (ЭС), магнитный усилитель (МУ), серводвигатель (СД) и регулирующий орган (РО).
Система
описывается следующими уравнениями:
элемент
сравнения![]()
магнитный
усилитель![]()
серводвигатель![]() регулирующий орган
регулирующий орган![]()
двигатель
внутреннего сгорания![]()
измерительное
устройство![]()
Параметры системы приведены в таблице.
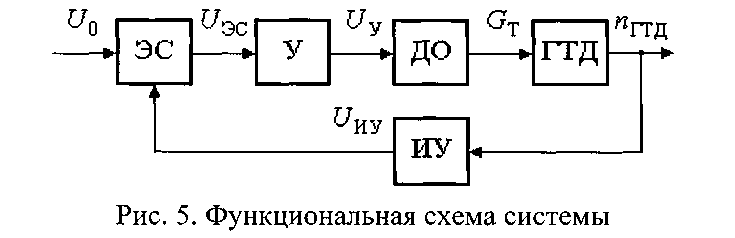
САУ№5
Система автоматического регулирования частоты вращения газотурбинного двигателя (ГТД) включает в себя ГТД как объект регулирования, измерительное устройство (ИУ) в цепи отрицательной обратной связи, элемент сравнения (ЭС), усилитель (У) и дозирующий орган (ДО).
Система
описывается следующими уравнениями:
элемент
сравнения![]()
усилитель![]() дозирующий орган
дозирующий орган
газотурбинный
двигатель
измерительное
устройство![]()
Параметры системы приведены в таблице.

САУ№6
Система
автоматического регулирования температуры
газа газотурбинного двигателя (ГТД)
включает в себя ГТД как объект
регулирования, измерительное
устройство - термопару (ИУ) в цепи
отрицательной обратной связи,
элемент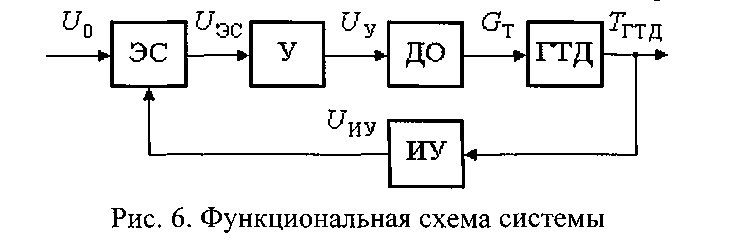 сравнения
(ЭС), усилитель (У) и дозирующий орган
(ДО).
сравнения
(ЭС), усилитель (У) и дозирующий орган
(ДО).
Система
описывается следующими уравнениями:
элемент
сравнения![]()
усилитель![]()
д![]() озирующий
орган газотурбинный
двигатель
озирующий
орган газотурбинный
двигатель

измерительное устройство
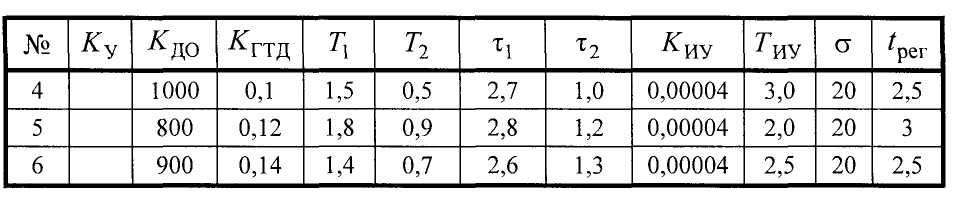
Параметры системы приведены в таблице.
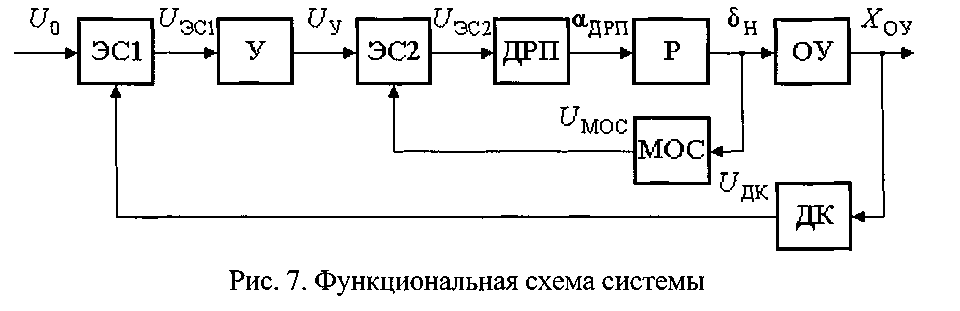
САУ № 7
Система автоматического управления беспилотным летательным аппаратом включает в себя датчик курса (ДК), усилитель (У), элементы сравнения (ЭС1 и ЭС2), двигатель рулевого привода (ДРП) и редуктор (Р), охваченные местной обратной связью (МОС), объект управления (ОУ).
Система
описывается следующими уравнениями:
первый
элемент сравнения![]()
усилитель![]()
второй
элемент сравнения![]()
двигатель
рулевого привода
редуктор![]()
местная
обратная связь![]()
объект
управления
датчик
курса![]()
Параметры системы приведены в таблице.

САУ № 8
Система автоматической стабилизации летательного аппарата по высоте полета включает в себя корректор высоты (KB), предварительный усилитель (ПУ), магнитный усилитель (МУ), рулевую машину поворота рулей высоты (РМ), объект управления (ОУ).

Система
описывается следующими уравнениями:
корректор
высоты![]() предварительный
усилитель
предварительный
усилитель![]()
магнитный
усилитель рулевая
машина
рулевая
машина

объект
управления
Параметры системы приведены в таблице.

Отсканировано и распознано Кириллом из ИИТ-38 :)