Контрольные работы
.doc
КОНТРОЛЬНАЯ РАбОТА №1
Цель работы – закрепить материал по разделам классической теории линейных систем автоматического управления, основанной на структурном представлении и преобразовании математического описания САУ, на базе понятия передаточной функции и частотных методов анализа и синтеза.
Исходные данные
Вариант 13
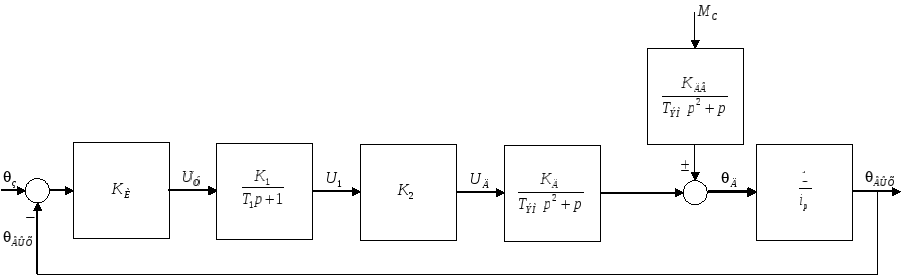
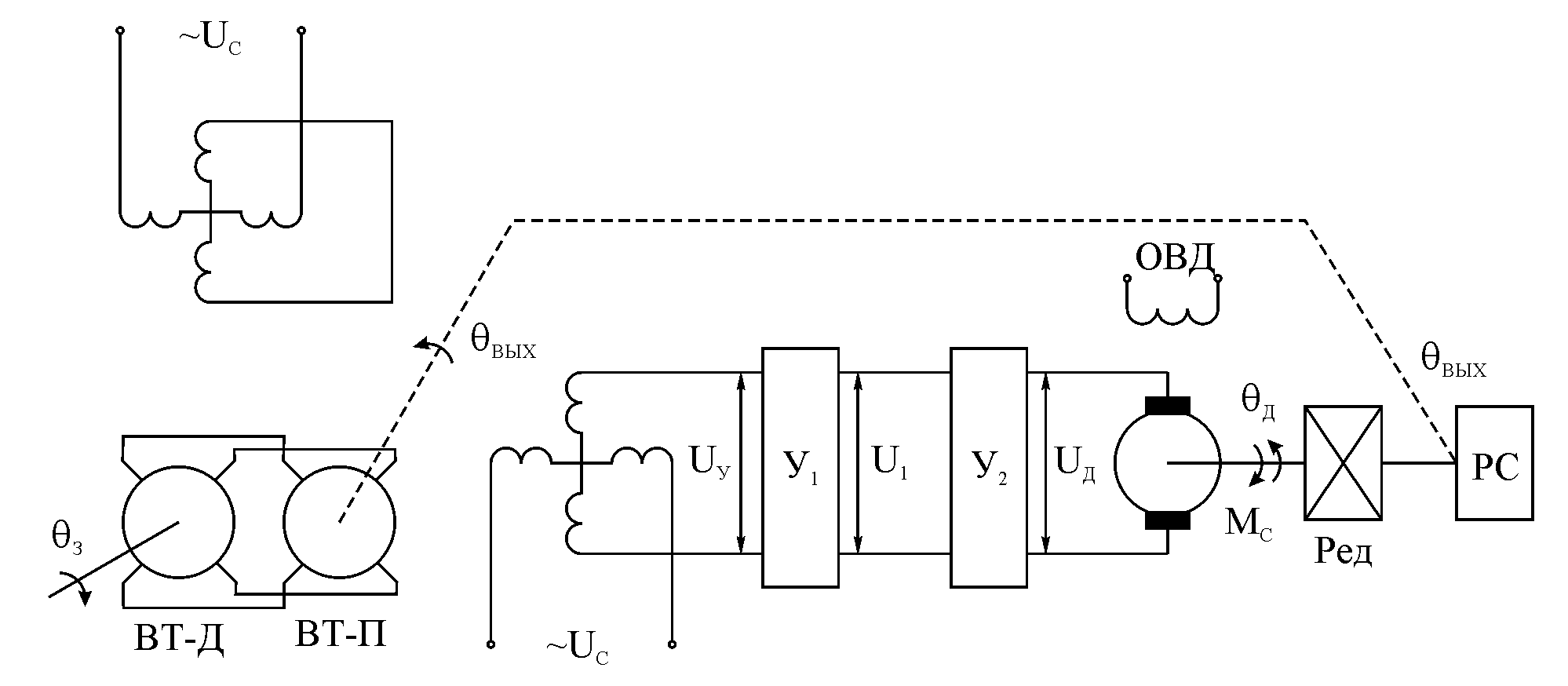 Функциональная
схема следящего электропривода
Функциональная
схема следящего электропривода
Параметры: Kи =20 в/рад; K1 = 50; K2 = 1; iP = 50;
KД = 0,2 (Вс)–1; KДВ = 0,3 (Нмс)–1; T1 = 3,5 с10–2; ТЭМ = 0,35 с.
Связь между входными и выходными переменными:
1:
измеритель рассогласования: ![]() ,
,
![]()
2:
усилитель У1 совместно с
демодулятором:
![]()
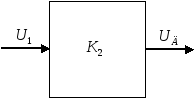
3:
усилитель мощности У2:
![]()
4:
исполнительный двигатель:
![]()
5:
редуктор:
![]()
Решение
1. По дифференциальным уравнения, соответствующим заданной функциональной схеме, записать передаточные функции и составить структурные схемы для каждого элемента системы.
Запишем уравнения элементов САУ в операторном виде:
1:
![]() ,
,
![]()
2:

3:
![]()
4:
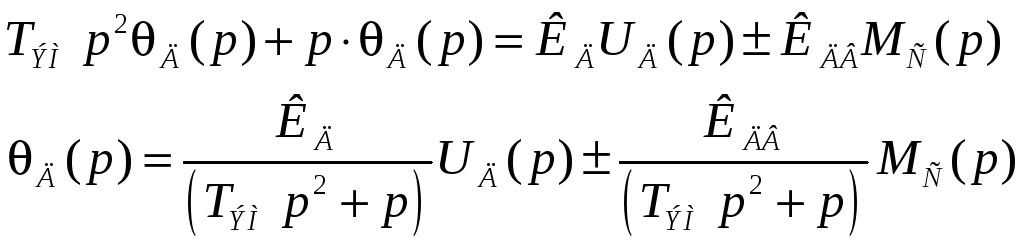
5:
![]()
структурные схемы:
|
1:
|
2:
|
|
3:
|
4:
|
|
5:
|




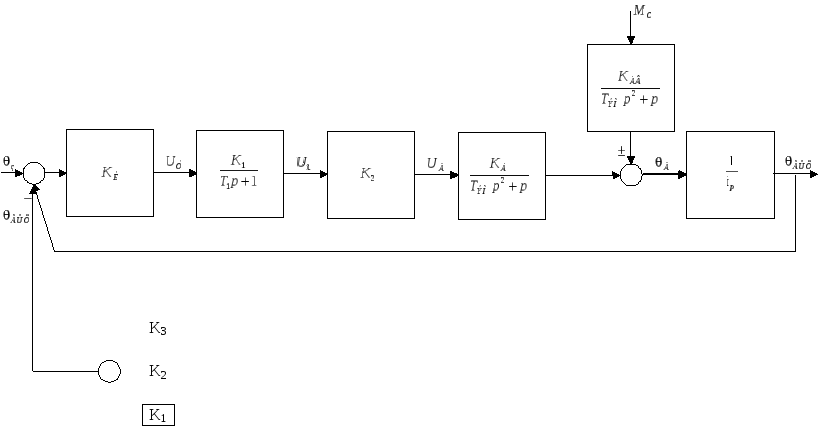
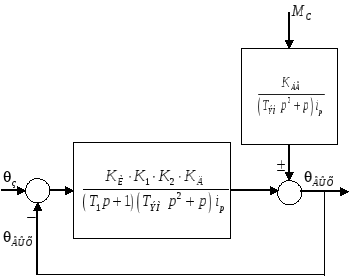
2. Составить структурную схему системы автоматического управления в целом.
3. Определить передаточные функции разомкнутой и замкнутой системы по управляющему и возмущающему воздействиям, а также передаточные функции по ошибке от этих воздействий.
Преобразуем структурную схему к стандартному виду:

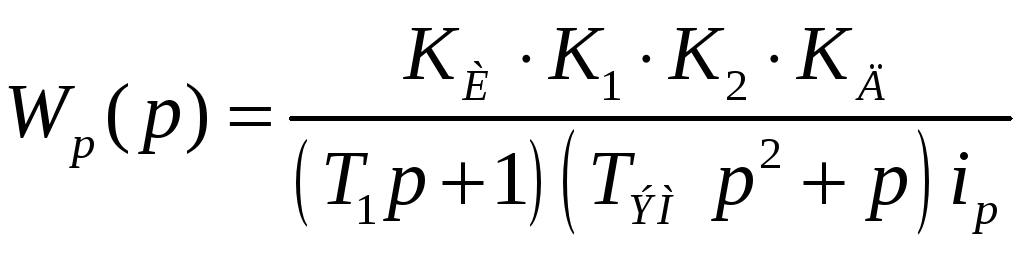
Передаточная функция разомкнутой системы:
Передаточная функция замкнутой системы по управлению:

Передаточная функция замкнутой системы по возмущению:

Передаточная функция замкнутой системы по ошибке от управления

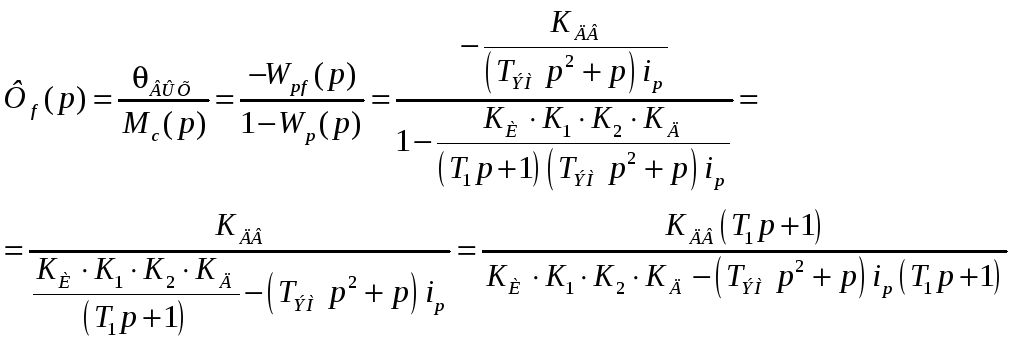
Передаточная функция замкнутой системы по ошибке от возмущения:

4. Исследовать систему на устойчивость методом Гурвинца.
Запишем характеристический полином замкнутой системы:

Подставим значения параметров:

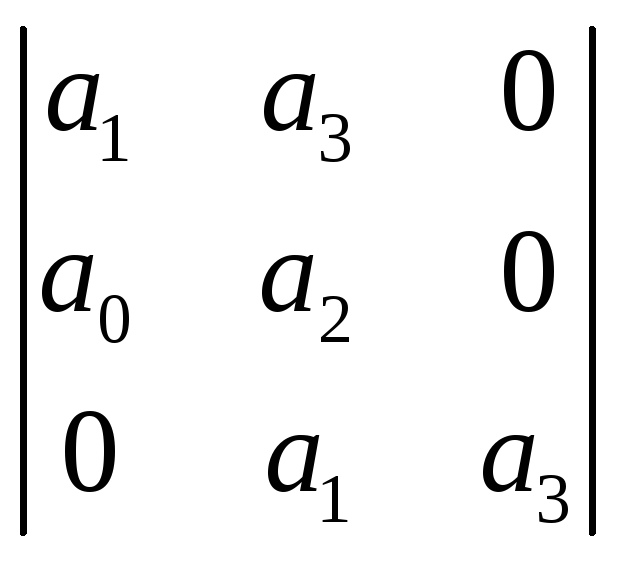
Матрица
главного определителя:

Проверим положительны ли все диагональные определители:

Следовательно система является устойчивой.
5. Определить установившиеся ошибки в системе от постоянных (единичных) управляющего и возмущающего воздействий.
Установившиеся ошибки в системе от единичных воздействий определяться коэффициентом С0=Ф(0).
Установившаяся ошибка от управляющего воздействия

Установившаяся ошибка от возмущающего воздействия

КОНТРОЛЬНАЯ РАбОТА №2
Цель работы – исследование системы автоматического управления методом, основанным на понятии пространства состояний.
Решение
1. Составить уравнения состояния по структурной схеме системы автоматического управления.
Порядок характеристического полинома системы n=3. Соответственно число переменных состояния должно быть 3.
![]()
Для каждого интегратора запишем дифференциальное уравнение первого порядка:
![]()
![]()
![]()
В векторно-матричной форме система имеет вид:
![]()



Уравнение наблюдения будет иметь вид:

2. Составить уравнение состояния по передаточной функции замкнутой системы автоматического управления по управляющему воздействию.
Передаточная функция замкнутой системы по управлению
![]()
Этой передаточной функции соответствует дифференциальное уравнение в операторной форме
![]()
Сделаем замену:
![]()
Уравнение примет вид:
![]()
![]()
![]()
Пусть
![]() ,
уравнение наблюдения будет иметь вид:
,
уравнение наблюдения будет иметь вид:
![]()
В векторно-матричной форме уравнения запишутся в виде:


3. Определить устойчивость системы, используя уравнения состояния, полученные в пункте 2.
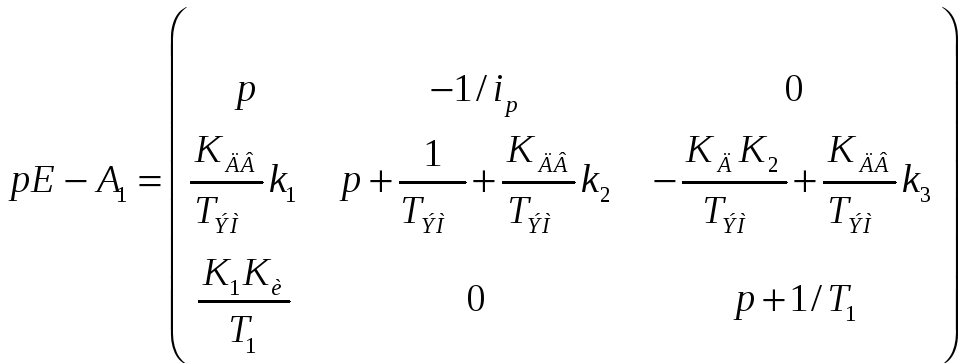
Вычислим по матрице A характеристический полином системы D=det(pE – A).


Анализ устойчивости выполним по критерию Гурвинца.

a0>0; (a1a2 – a0a3)>0
Условие выполняется, значит система устойчива.
4. Произвести синтез модального регулятора при следующих условиях:
- все переменные состояния доступны изменению;
- синтез регулятора производится только для управляющего воздействия, возмущающее воздействие равно нулю;
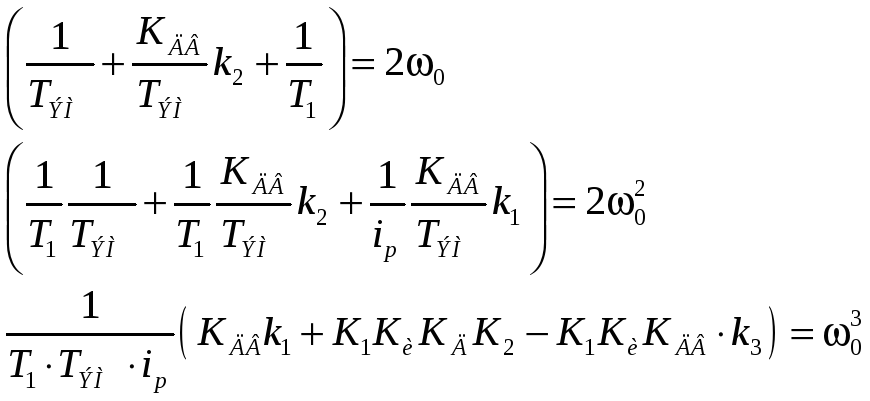
желаемый характеристический полином замкнутой системы принимаем в виде полинома соответствующего фильтру Баттерворта 3-го порядка
![]() ,
,
![]()
Входная матрица системы:

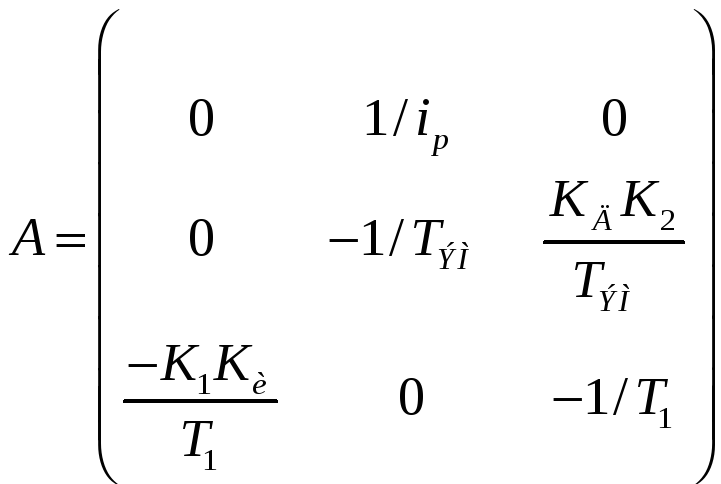
Собственная матрица параметров системы:
Матрица искомых коэффициентов обратных связей по переменным состояния имеет вид
K=[K1 K2 K3]
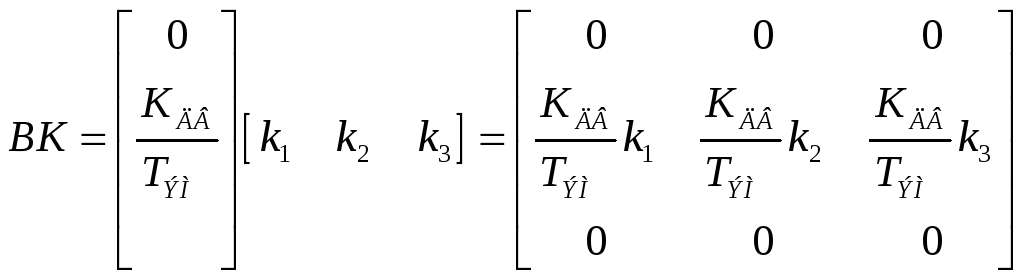
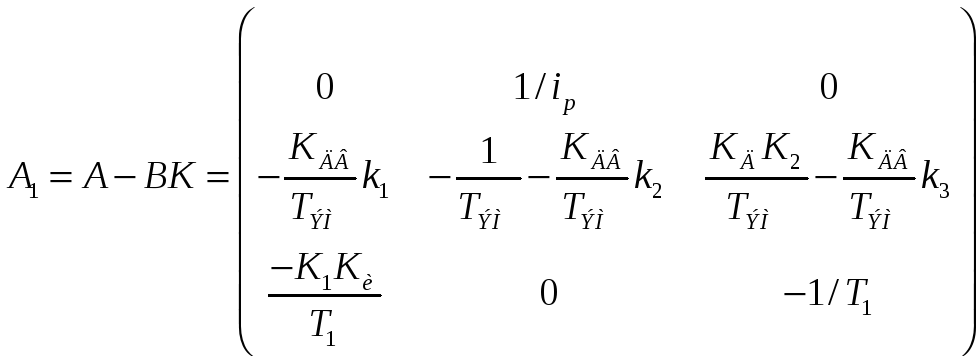

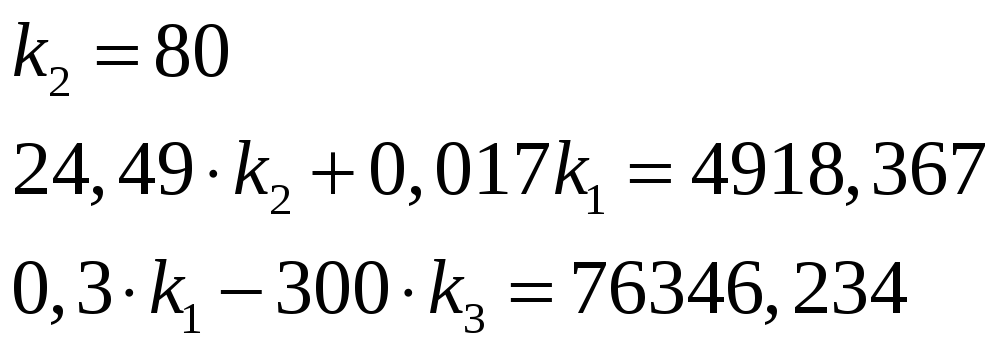
подставим числа:

Структурная схема имеет вид: