5 Анализ устойчивости некорректированной сар
Для того, чтобы установить устойчива система или нет, воспользуемся логарифмическим критерием устойчивости. Для этого построим логарифмическую амплитудно-частотную характеристику и логарифмическую фазо-частотную характеристику разомкнутой системы. Передаточная функция разомкнутой системы будет выглядеть следующим образом:
![]()
![]()
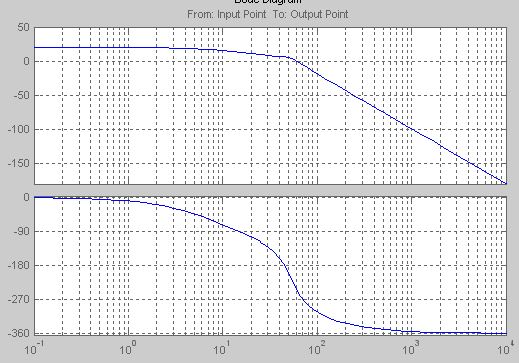
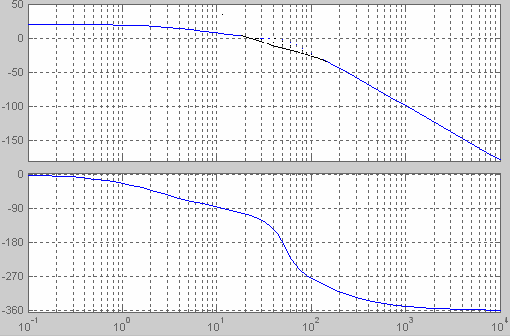
Используя эту передаточную функцию строим ЛЧХ и ЛФХ:

При
анализе построенных ЛАХ и ЛФХ видим,
что нескорректированная система является
не устойчивой, так как ЛФХ пересекает
![]() раньше, чем ЛАХ пересекает 0 (логарифмический
критерий устойчивости). Поэтому необходима
коррекция САР путем введения корректирующего
устройства.
раньше, чем ЛАХ пересекает 0 (логарифмический
критерий устойчивости). Поэтому необходима
коррекция САР путем введения корректирующего
устройства.
6. Синтез сар с заданными показателями качества
В качестве корректирующего устройства принимаем интегро-дифференцирующее звено с передаточной функцией вида:
![]()
Для определения формы ЛАХ корректирующего устройства необходимо из желаемой ЛАХ (ЖЛАХ) вычесть реальную ЛАХ. Построим желаемую ЛАХ.
Из графика видим, что w1=50c-1, w2=7 c-1, w3=2 c-1
w4
определим по формуле
![]() ,w4=175
c-1
,w4=175
c-1
T1=0,142, T2=0,018, T3=0,316, T4=0,00808
Получили
WКУ(р)=[(0.142p+1)*(0.018p+1)]/[(0.316p+1)*(0.00808p+1)]
Построим ЛАХ и ЛФХ корректирующего устройства:
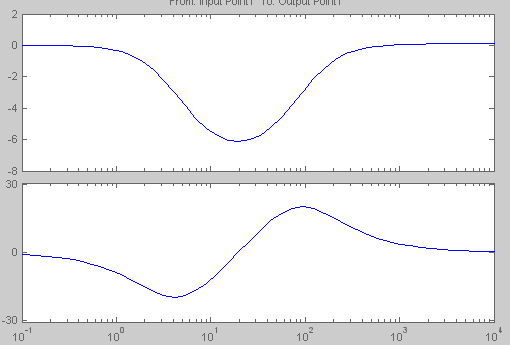
После применения корректирующего устройства получили:
 ЛАХ
и ЛФХ скорректированной системы:
ЛАХ
и ЛФХ скорректированной системы:
Из графиков видно, что скорректированная САР является устойчивой. Система имеет запасы устойчивости по фазе Δφ=580 , по модулю ΔL=15дб, что удовлетворяет заданным параметрам качества.
 Произведем
реализацию корректирующего устройства.
Произведем
реализацию корректирующего устройства.
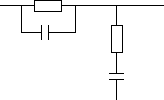
Схема корректирующего звена имеет следующий вид:
![]()
![]()
![]()
![]()
![]()
![]()
![]() и
и
![]()
Принимаем
![]() мкФ,
а
мкФ,
а
![]() мкФ
мкФ
![]()
![]() кОм
кОм
![]() кОм
кОм
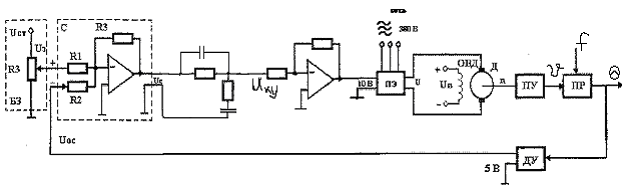
Функциональная схема САР с учетом корректирующего устройства:
7. Анализ качества сар
Сделаем анализ переходных процессов разомкнутой и замкнутой САР.
Разомкнутая САР.
Переходной процесс выходной координаты при изменении управляющего воздействия от 0.21 до 0.31 В на 15 секунде:
Θ, 0С
720 618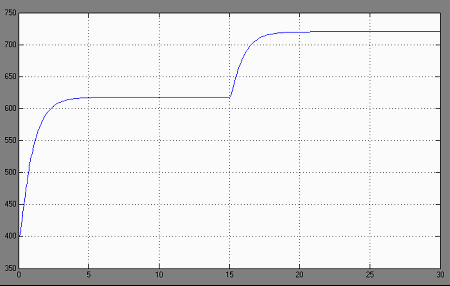
график №1
Переходный процесс выходной координаты при изменении возмущения от 0 мм до 0.4 мм на 15 секунде при управляющем воздействии U = 0.31В:
Θ, 0С
720 740
график №2
 Рассмотрим
график №2 в более крупном масштабе и
определим статическую ошибку
Рассмотрим
график №2 в более крупном масштабе и
определим статическую ошибку
Θ, 0С
∆θ 740 7200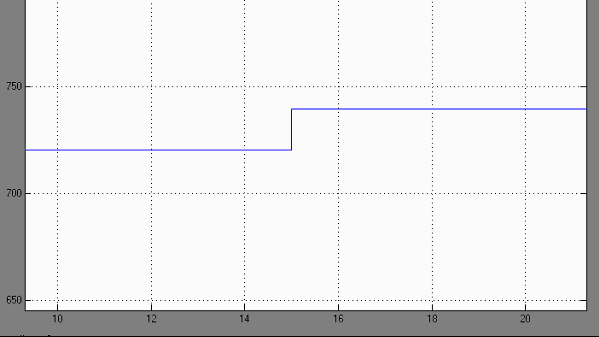


график №3
Статическая ошибка выходной координаты составляет
![]() °С.
°С.
Разомкнутая
система не удовлетворяет всем требуемым
параметрам.![]()
Замкнутая САР
Переходный процесс выходной координаты при изменении управляющего воздействия (от 4В до 5В) на 5 секунде:
Θ, 0С
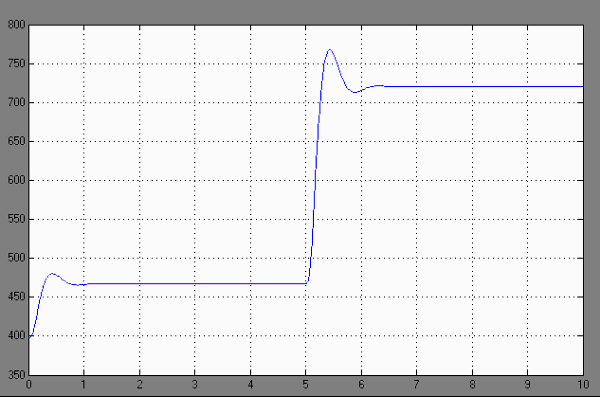
720
580
t,c
график №4
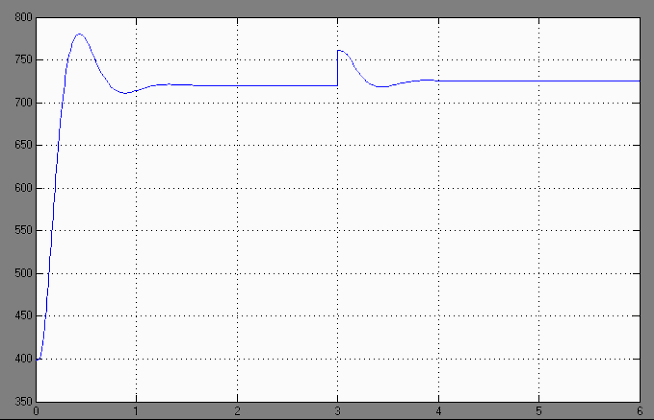
 Переходной
процесс выходной координаты при изменении
возмущения t
(максимальное изменение величины
припуска) от 0 до 0.4 и возмущения S
(максимальное отклонение величины
подачи) от 0 до 0,0275 на 3 секунде при
управляющем воздействии 5 В:
Переходной
процесс выходной координаты при изменении
возмущения t
(максимальное изменение величины
припуска) от 0 до 0.4 и возмущения S
(максимальное отклонение величины
подачи) от 0 до 0,0275 на 3 секунде при
управляющем воздействии 5 В:
Θ, 0С