

7. Построение лачх корректирующего устройства, определение его передаточной функции и расчет параметров.
Передаточная функция корректирующего устройства имеет вид:
![]() (12)
(12)
Расчет корректирующего устройства.
Корректирующее устройство можно представить в виде последовательных динамических звеньев, разделенных усилителями.
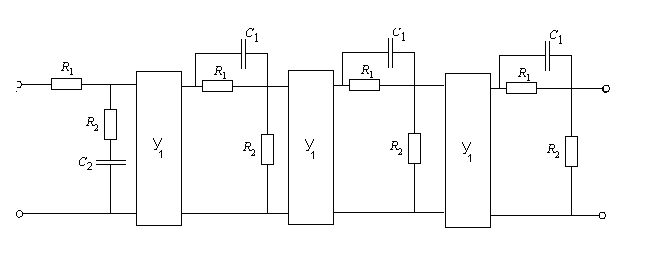
Рис.6–Корректирующее устройство.
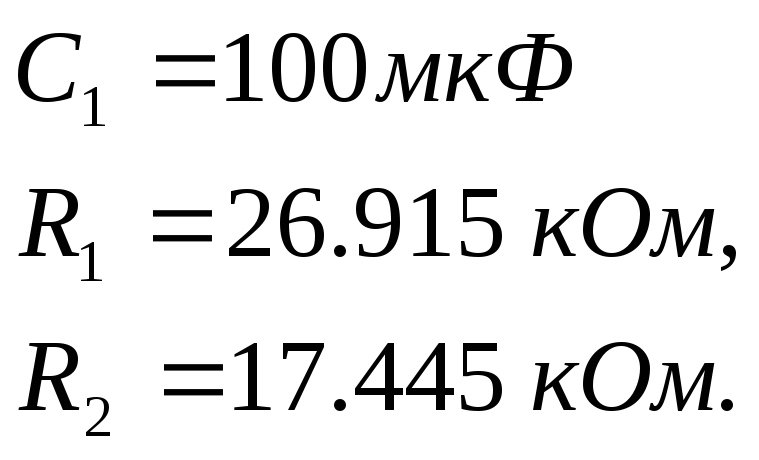
Произведем расчет параметров каждого звена.
Передаточная функция первого звена имеет вид:
![]() ,
,
откуда
Передаточная функция второго звена имеет вид:
![]()
откуда
Передаточная функция третьего звена имеет вид:
![]()
откуда
Передаточная функция четвертого звена имеет вид:
![]()
откуда
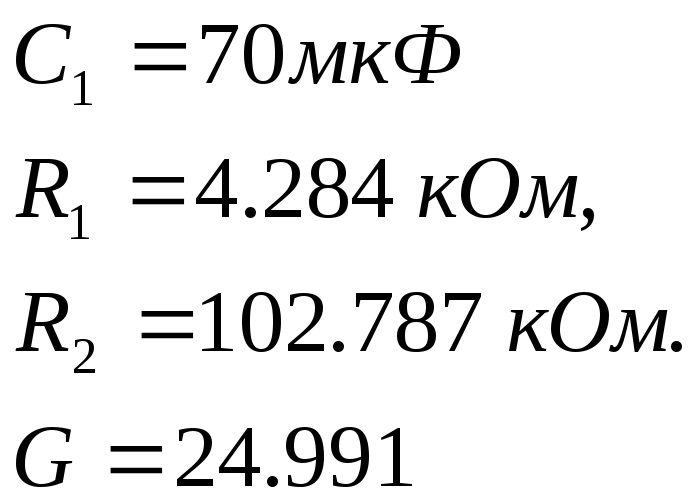
Рассчитаем параметры усилителя.
Необходимо, чтобы коэффициент передачи исходной системы сохранялся, поэтому
![]()
Пусть
![]() ,
тогда
,
тогда
![]()
Передаточная функция скорректированной системы находится по формуле
![]()
Тогда
![]()
8. Определение статистической ошибки, ошибок по скорости и по ускорению скорректированной системы, запасы устойчивости.
Передаточная функция ошибки замкнутой системы вычисляется по формуле:
![]()
Тогда для исходной системы

Статическая ошибка:
![]()
Скоростная ошибка:
![]()
Ошибка по ускорению:
![]()
Для скорректированной системы
![]()
Статическая ошибка:
![]()
Скоростная ошибка:
![]()
Ошибка по ускорению:
![]()
Для скорректированной системы коэффициенты ошибок значительно меньше, чем для исходной.
Запасы устойчивости:
Для исходной системы:
Запас устойчивости по амплитуде 9 дБ.
Запас устойчивости по фазе равен: 40
Для скорректированной системы:
Запас устойчивости по амплитуде 16 дБ.
Запас устойчивости по фазе равен: 100
 Сравнивая
выше указанные характеристики систем
делаем вывод, что скорректированная
система обладает намного лучшими
качествами процесса управления (снижена
ошибка системы, повышены запасы
устойчивости и т.д.), чем исходная.
Сравнивая
выше указанные характеристики систем
делаем вывод, что скорректированная
система обладает намного лучшими
качествами процесса управления (снижена
ошибка системы, повышены запасы
устойчивости и т.д.), чем исходная.
Запасы устойчивости по амплитуде и по фазе методом Найквиста:
![]() ;
;![]() .
.
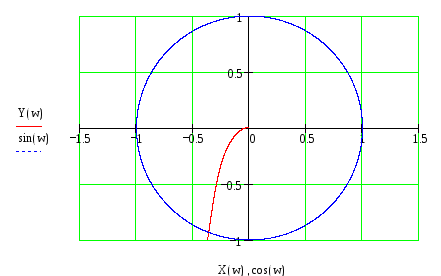
Рис.7 Годограф Найквиста и окружность единичного радиуса.
9. Расчет переходной характеристики, моделирование сау.
![]()
Из преобразований
Карсона-Хевисайда переходная функция
![]() :
:
![]() ,
,
где
![]() -
корни характеристического уравнения
-
корни характеристического уравнения![]() ,
,
![]() ,
,
![]() .
.
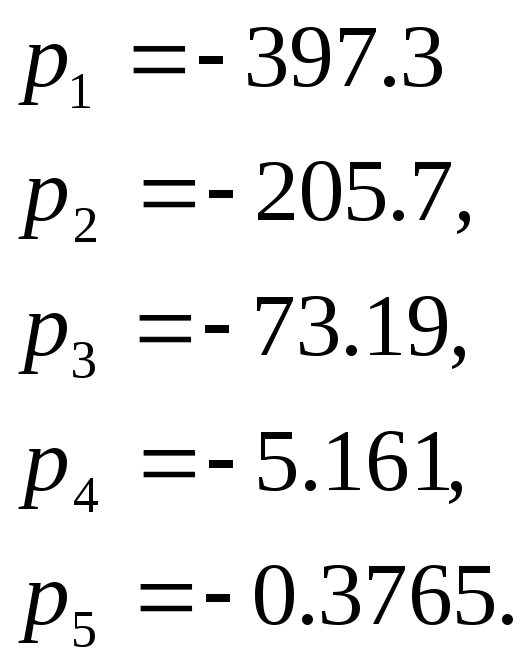
Найдем корни
характеристического уравнения
![]() :
:
Найдем значение постоянной составляющей.
![]() .
.
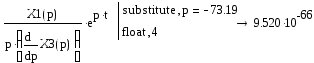
Для каждого корня
![]() найдем значение выражения
найдем значение выражения![]() :
:

 ,
,

Расписав сумму и проделав некоторые преобразования, получили переходную функцию скорректированной системы:
![]()
Построим график переходного процесса
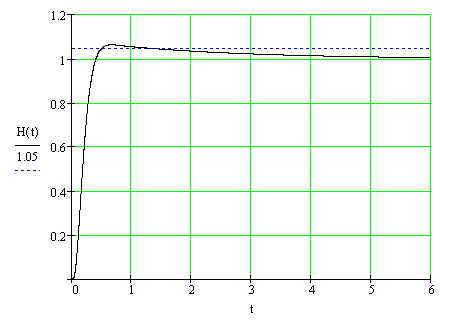
 Рис.8–
Переходная функция h(t).
Рис.8–
Переходная функция h(t).
hmax=1,064.;h(0)=0; h()=1,
![]() ,
что меньше заданного.
,
что меньше заданного.
Время
переходного процесса
![]() [с].
[с].
Следовательно, при использовании корректирующего устройства переходной процесс происходит значительно быстрее, сравнительно с временем переходного процесса в исходной САУ.
Заключение
В проделанной курсовой работе была сформирована исходная САУ при помощи выбора оптимального значения неизвестного коэффициента усиления методом D – разбиения. Устойчивость системы была проверена критериями Гурвица, Михайлова и Найквиста.
Была сформирована желаемая ЛАХ, удовлетворяющая требуемым условиям быстродействия, точности и перерегулирования. Был произведен расчет и синтез корректирующего устройства, обеспечивающего корректировки исходной САУ с целью получения желаемых результатов. Установлено, что у скорректированной САУ время перерегулирования, показатели качества, переходные характеристики, запасы устойчивости по амплитуде и по фазе значительно улучшаются по сравнению с исходной
Литература: