

Лабораторная работа 6
Составление динамической модели простейшей механической колебательной системы методом электромеханических аналогий
Цель работы: усвоение методики и развитие навыков выполнения начальных процедур анализа акустических систем: составление динамической модели анализируемого устройства, составление его эквивалентных электрических схем.
Методические указания к выполнению работы
Изучив материал по теме, выполнить задания, ответы на которые представить для отчета в письменном виде.
Введение
П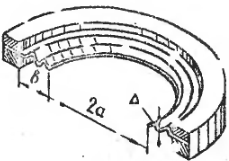 ростейшая
механическая колебательная система,
состоящая из массы m,
подвешенной на пружине, с коэффициентом
гибкости с
и внутренним трением
r,
является
составной частью всех электроакустических
аппаратов – громкоговорителей,
микрофонов, телефонов и др.
ростейшая
механическая колебательная система,
состоящая из массы m,
подвешенной на пружине, с коэффициентом
гибкости с
и внутренним трением
r,
является
составной частью всех электроакустических
аппаратов – громкоговорителей,
микрофонов, телефонов и др.
Масса m реализуется в виде жесткой конической или куполообразной диафрагмы с подклеенной к ней звуковой катушкой.
П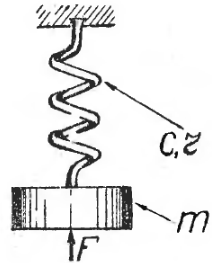 ружина
имеет вид гофрированного кольца,
называемого воротником, центрирующей
шайбой или просто гофром.
ружина
имеет вид гофрированного кольца,
называемого воротником, центрирующей
шайбой или просто гофром.
В упрощенном виде простейшую механическую колебательную систему в виде диска (поршня), подвешенного на гофрированной (а) или спиральной (б) пружине.
а) б)
Существует общность математических уравнений, которыми описываются колебания в механических системах и колебания тока в электрических цепях. Это ясно видно на примере уравнения напряжений, описывающего вынужденные колебания в одиночном линейном электрическим контуре, и уравнением сил для линейной механической колебательной системы с одной степенью свободы:
электрическая цепь
 ,
,механическая система
 .
.
С математической точки зрения эти уравнения ничем не отличаются. разница только в использованных обозначениях.
1 Механическая колебательная система с одной степенью свободы
Всякий акустический аппарат представляет собой динамическую систему, в которой тем или иным способом возбуждаются колебания. Одним из таких способов, с которым чаще всего встречаются в технической акустике, является воздействие внешней периодической силы F.
Линейные колебательные системы характеризуются тем, что происходящие в них при этом вынужденные колебания имеют частоту, совпадающую с частотой внешнего воздействия. Такие системы называются линейными в силу того обстоятельства, что их поведение описывается линейными дифференциальными уравнениями. Значение линейных систем в технической акустике связано с требованием неискажённого преобразования колебаний из одних форм другие, а этому требованию могут удовлетворить только линейные системы.
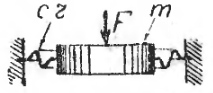
П ростейший
пример линейной механической
колебательной
системы с одной степенью свободы –
тело массой т,
упруго
связанное с положением равновесия,
которое может перемещаться без трения
вдоль некоторой прямой представлен на
рис. 1.
ростейший
пример линейной механической
колебательной
системы с одной степенью свободы –
тело массой т,
упруго
связанное с положением равновесия,
которое может перемещаться без трения
вдоль некоторой прямой представлен на
рис. 1.
Такая система линейна, если возвращающая сила пропорциональна смещению тела х из положения равновесия:
возвр.
сила =
![]() .
.
Знак «минус» указывает, что сила направлена противоположно смещению, поэтому она и называется возвращающей.
Рисунок 1
Коэффициенты
![]() и с
характеризуют
упругость
и гибкость
системы. Упругость
численно равна силе, вызывающей единичное
смещение, измеряется в Н/м; гибкость с
определяет
смещение, вызываемое единичной силой,
измеряется в м/Н.
и с
характеризуют
упругость
и гибкость
системы. Упругость
численно равна силе, вызывающей единичное
смещение, измеряется в Н/м; гибкость с
определяет
смещение, вызываемое единичной силой,
измеряется в м/Н.
Уравнение собственных (свободных) колебаний системы запишем в виде
![]() ,
или
,
или
![]() (1)
(1)
где
 –
ускорение тела.
–
ускорение тела.
Уравнение движения (1) можно переписать иначе:
![]() ,
(2)
,
(2)
где
 .
(3)
.
(3)
Общее решение уравнения (2) записывается в комплексном виде как
![]() ,
(4, а)
,
(4, а)
а
в тригонометрическом виде как:
![]() ,
(4, б)
,
(4, б)
где
![]() –
произвольные постоянные.
–
произвольные постоянные.
Решение
показывает, что система, возбуждённая
начальным толчком и затем предоставленная
самой себе, совершает простое гармоническое
(незатухающее) колебание, круговая
частота (![]() )
которого определяется по формуле (3)
параметрами системы – её массой и
гибкостью. Амплитуда колебания С
и
начальная фаза
)
которого определяется по формуле (3)
параметрами системы – её массой и
гибкостью. Амплитуда колебания С
и
начальная фаза
![]() произвольны и зависят от начальных
условий.
произвольны и зависят от начальных
условий.
Практически свободные колебания будут, конечно, затухать благодаря неизбежному наличию рассеяния энергии. Желая подчеркнуть это обстоятельство, такую систему называют диссипативной.
В
линейных системах диссипативные силы
(силы сопротивления) пропорциональны
скорости движения:
![]() ,
т.е. диссип. сила = –
,
т.е. диссип. сила = –![]() .
.
Знак минус указывает, что сила направлена к уменьшению скорости. Коэффициент r, численно равный диссипативной силе при единичной скорости, измеряется в Н·с/м и называется активным сопротивлением (физический смысл – коэффициент трения).
Уравнение свободных колебаний диссипативной системы имеет вид
![]() –
–![]() или
или
![]() = 0 . (6)
= 0 . (6)
Разделив
на m
и введя дополнительные обозначения
![]() =
=![]() ,
получим:
,
получим:
![]() =
0 . (7)
=
0 . (7)
Величина = называется коэффициент затухания.
Если линейная система совершает вынужденные колебания под действием внешней периодической синусоидальной силы F, уравнение движения можно представить в виде:
=
![]() .
(10)
.
(10)
Общее решение уравнения (10) складывается из двух частей:
![]() .
(11)
.
(11)
Здесь
![]() – собственное затухающее колебание,
прекращающееся через некоторый промежуток
времени;
– собственное затухающее колебание,
прекращающееся через некоторый промежуток
времени;
![]() –
вынужденное (стационарное) колебание
под действием внешней силы с частотой
–
вынужденное (стационарное) колебание
под действием внешней силы с частотой
![]() .
.
Если
решение уравнения представить в виде
![]() ,
то подстановка в уравнение (10) даёт:
,
то подстановка в уравнение (10) даёт:
![]() .
Отсюда
.
Отсюда
![]()
 .
.
Интересным
является определение скорости
![]() вынужденного колебательного движения:
вынужденного колебательного движения:
 .
Амплитуда
.
Амплитуда
![]() скорости
вынужденных колебаний будет равна:
скорости
вынужденных колебаний будет равна:
![]() =
= .
(12)
.
(12)
Анализ полученного выражения показывает, что при заданной амплитуде внешней силы, амплитуда скорости вынужденных колебаний зависит от:
параметров системы m, c, r,
частоты
 внешнего
воздействия.
внешнего
воздействия.
Величина
![]() =
=![]() =
= называется
полным
механическим сопротивлением
системы.
называется
полным
механическим сопротивлением
системы.
В комплексной форме механическое сопротивление линейной системы с одной степенью свободы записывается в виде:
![]() =
= .
(13)
.
(13)
Компонентами механического сопротивления линейной системы с одной степенью свободы являются:
-
инерциальное сопротивление
![]()
-
упругое сопротивление
![]() (14)
(14)
-
активное сопротивление
![]() .
.
Частота
![]() ,
при которой инерциальное сопротивление
полностью компенсируется упругим
сопротивлением, т.е.
,
при которой инерциальное сопротивление
полностью компенсируется упругим
сопротивлением, т.е.
 ,
,
 (15)
(15)
называется
резонансной.
На этой частоте скорость
![]() имеет наибольшее значение.
имеет наибольшее значение.
Выражения (12) позволяют построить частотные зависимости амплитуд смещения, скорости и ускорения простой колебательной системы. Эти зависимости удобно строить, пользуясь безразмерными представлениями, т.е. отнеся каждую из интересующих величин к какому-нибудь наиболее характерному её значению, или иначе говоря, пронормировав её по этому значению.
Например,
вместо круговой частоты
![]() удобно пользоваться безразмерной
величиной
удобно пользоваться безразмерной
величиной
![]() ,
для чего следует
пронормировать по резонансной частоте
,
для чего следует
пронормировать по резонансной частоте
![]() :
:
 .
При этом резонансу соответствует
значение
=1.
.
При этом резонансу соответствует
значение
=1.
Механическое
сопротивление также можно представить
в безразмерном (нормированном) виде. На
резонансной частоте инерциальное (![]() )
и упругое (
)
и упругое (![]() )
сопротивления имеют одинаковую величину.
При этом каждое из них равно так
называемому характеристическому
сопротивлению
колебательной системы:
)
сопротивления имеют одинаковую величину.
При этом каждое из них равно так
называемому характеристическому
сопротивлению
колебательной системы:
 .
.
Действительно, воспользовавшись формулой (15), можно проделать следующее преобразование:
 .
.
Величина
![]() является удобным нормирующим коэффициентом
для механического сопротивления. При
нормировании по
появляется отношение вида
является удобным нормирующим коэффициентом
для механического сопротивления. При
нормировании по
появляется отношение вида
 ,
называемое добротностью
системы. Обратная ей величина, т.е.
,
называемое добротностью
системы. Обратная ей величина, т.е.
 называется коэффициентом
потерь.
называется коэффициентом
потерь.
Разбив
диапазон изменения частоты
на три области:
![]() (
>1),
(
>1),
![]() (
<1)
и
(
<1)
и
![]() (
~1)
можно рассмотреть некоторые
частные случаи механической системы с
одной степенью свободы.
(
~1)
можно рассмотреть некоторые
частные случаи механической системы с
одной степенью свободы.
1)
Система,
управляемая массой.
Получается в тех случаях, когда
инерциальное сопротивление значительно
преобладает над упругим и активным,
т.е.
![]()
![]() ;
;
![]() .
.
С
учетом (3) первое неравенство приводится
к виду
.
С учетом (7) второе неравенство приводится
к виду:
![]() .
.
Вывод.
Если
система имеет низкую собственную частоту
и малое затухание, то из числа параметров
системы преобладающее значение имеет
масса.
Полное сопротивление мало отличается
от инерциального:
~![]() ,
,
 ;
;
![]() ;
;
![]() ,
,
т.е. в таком режиме частотно независимым является ускорение.
2) Система, управляемая упругостью. Реализуется при условиях
![]()
![]() ;
,
;
,
или,
что то же самое,
;
![]()
![]() .
Последнее неравенство означает, что
постоянная времени
.
Последнее неравенство означает, что
постоянная времени
![]() мала по сравнению с периодом внешней
силы. Характерной особенностью такой
системы является независимость от
частоты ее смещения; скорость и ускорение
пропорциональны соответственно первой
и второй степени частоты.
мала по сравнению с периодом внешней
силы. Характерной особенностью такой
системы является независимость от
частоты ее смещения; скорость и ускорение
пропорциональны соответственно первой
и второй степени частоты.
Вывод. В системе с высокой собственной частотой преобладающее значение имеет гибкость (или обратная ей величина – упругость). Полное сопротивление мало отличается от упругого: ~ .
3) Система, управляемая сопротивлением.. Характеризуется преобладанием активного сопротивления над реактивным: ~ .
Это
случай либо апериодической системы
(
,
![]() ),
либо системы, возбуждаемой частотами,
близкими к резонансной частоте, когда
реактивное сопротивление мало благодаря
взаимной компенсации инерциального и
упругого сопротивления:
–
~
0.
),
либо системы, возбуждаемой частотами,
близкими к резонансной частоте, когда
реактивное сопротивление мало благодаря
взаимной компенсации инерциального и
упругого сопротивления:
–
~
0.