

Министерство образования и науки Украины
Севастопольский национальный технический университет
Кафедра «Теории машин и механизмов»
Механизм кривошипно-летучих рычажных ножниц
Пояснительная записка к курсовому проекту
по теории механизмов и машин
Тема - № 1 Руководитель – доцент Калинин М.И.
Вариант- № 3 Разработал студент гр. АВ-32 д
Кудинов А.В.
Севастополь
2006 Г.
|
Cодержание
Стр.
| ||||||||||
|
|
|
|
|
|
МКРН.01.001.Тч | |||||
|
|
|
|
|
| ||||||
|
Изм. |
Лист |
№ документа |
Подпись |
Дата | ||||||
|
Разработал: |
Сиротинский А.В.юююю……. |
|
|
Пояснительная запиcка |
Лит. |
Лист |
Листов | |||
|
Проверил: |
Калинин М.И. |
|
|
|
|
|
3 |
| ||
|
|
|
|
|
Каф. ТМ и М Гр.АВ-31 д.
| ||||||
|
Н.контроль |
|
|
| |||||||
|
Утвердил |
|
|
| |||||||
1) Введение .
В задачах , стоящих перед современным машиностроением , особое место занимает подготовка квалифицированных специалистов. Инженеры должны владеть всеми навыками расчёта и конструирования новых автоматизированных и высокопроизводительных машин .Рационально спроектированная машина должна удовлетворять социальным требованиям – безопасности в использовании , экологическим нормам , экономическим ,производственным , технологическим и тд.
Решение этих задач на начальной стадии проектирования состоит в качественном выполнении анализа и синтеза проектируемой машины , а также разработке её кинематической схемы , обеспечивающей с достаточным приближением воспроизведение требуемого закона движения . Это делается для того , чтобы конструктору было легче понять как устроен механизм , как он работает , по каким законам происходит его движение .
В данном курсовом проекте выполнен анализ и синтез механизма кривошипно-рычажных летучих ножниц (наример : гильотинные ножницы).Этот механизм представляет собой кривошипно шатунный механизм с двумя ножами (гильотинами).
.
Летучие ножницы предназначены для резки металла на ходу ("на лету") при его движении с большой скоростью. Во многих случаях работоспособность этих ножниц определяет производительность прокатного стана (например, непрерывного заготовочного). Существуют следующие основные типы летучих ножниц: барабанные, рычажно-кривошипные, с плавающим кривошипом, планетарные и маятниковые.
2) Структурный анализ рычажного механизма .
|
|
Параметр |
Обозначение |
Размерность |
Значение |
|
1 |
Размеры звеньев рычажного механизма
Длина ножа |
lOA= lDE lAB= lEF lBC= lFK lX ly lH |
м >> >> >> >> >> |
0,45 1,95 0,65 1,72 0,545 0,36 |
|
2 |
Частота вращения кривошипа ОА и DE |
n1= n4 |
об/мин |
74 |
|
3 |
Массы звеньев рычажного механизма |
mB2= m5 |
кг |
620 |
|
4 |
Момент инерции звеньев |
IS1= IS4 IS2= IS5 IS3= IS6
|
м |
28 45 6 |
|
5 |
Максимальное усилие резанья |
Fрез. макс. |
кН |
2100 |
|
6 |
Частота вращения электродвигателя |
nдв |
Об/мин |
910 |
|
7 |
Коэффициент неравномерности вращения кривошипов ОА и ED (вращаются синхронно) |
δ |
--- |
1/30 |
|
8 |
Положения кривошипов ОА и ED при силовом расчёте |
φ1 = φ2 |
град |
170 |
Исходные данные Таблица 1.
Группой Ассура называется открытая кинематическая цепь, которая при присоединении свободным элементом звеньев к стойке будет иметь
нулевую степень подвижности ( Wгр = 0 ) , а после присоединения к механизму не изменит его числа степеней подвижности. Структурная формула группы Ассура имеет вид :
3n – 2p5 = 0
p5 = 3/2 n
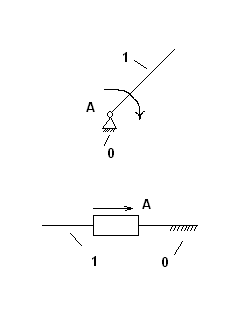
Механизмом первого класса называют ведущее звено, соединённое кинематической парой ( вращательной или поступательной ) со стойкой (рис. 1)
Рис.1– Изображение начального механизма .
Структурный анализ механизма рычажных ножниц .
Схема механизма
 Рис.2
– Механизм кривошипно-рычажных летучих
ножниц
Рис.2
– Механизм кривошипно-рычажных летучих
ножниц
Данный механизм состоит из стойки 7 , кривошипа 1,4 ; шатуна 2,5 ; коромысла 3,6 ;
Эти звенья образуют только низшие пары (т.е. пары пятого класса) вращательные :
О (7-1) – Р5 ; А (1-2) – Р5 ; В (2-3) – Р5 ; С (3-7) – Р5 ; D (7-4) – Р5;
E (4-5) – Р5 ; F (5-6) – P5 ; K (6-7) – P5
По формуле Чебышева - W = 3 N – 2 P5 – P4 , находим число степеней подвижности механизма : W = 3 3 – 2 4 = 1 ( т.к. ножницы состоят из двух аналогичных частей соединенных в один механизм , то рассматриваем одну часть ) .
Теперь разделим механизм на группы Ассура , начиная с последней наслоенной группы (рис.3,4) .
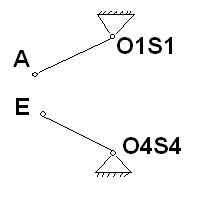
Начальный механизм первого рода (звено 7-1)
Начальный механизм первого рода (звено 7-4)
Рис.3 – Изображение начального механизма .

Группа Ассура второго порядка , второго класса , второго вида (звенья 5-6) .
Группа Ассура второго порядка , второго вида , второго вида (звенья 2-3) .
Рис.4 – Изображение групп Ассура механизма рычажных ножниц .
Формула строения механизма : I (0,1,4) → II (2,3,5,6)