

4.Методичні вказівки.
Для забезпечення обміну даними між мікропроцесором (МП) і периферійними пристроями необхідні відповідні засоби: відповідні команди в системі команд МП, керуючі сигнали і сигнали, які відображають дані, і відповідні засоби під’єднання. Всі ці засоби складають інтерфейс вводу-виводу.
В системі команд МП 8080/8086 передбачені дві команди роботи з пристроями вводу-виводу: IN – ввід та OUT – вивід. Це команди, в операндахі яких вказується адреса пристрою вводу або виводу.
Порти в ІBM PC використовуються для доступу до мікросхем. Звернутися до них можна в будь-який момент із програми на асемблері. Наприклад, можна використовуючи порт, звернеться до мікросхеми переривань або таймеру. Робота з портами - це робота на дуже низькому рівні й завжди є небезпека, що може щось змінитися. Але зате це дає дуже більші можливості для програміста. Для роботи з портами є спеціальні команди ІN й OUT:
іn регістр,ном_порту уведення значення з порту вводу-виводу
out ном_порту,регістр висновок значення в порт вводу-виводу
OUT |
im.byte, AL/im.byte, AX DX, AL/DX, AX |
Виводить дані з регістра AL або AX у порт. Перший операнд - номер порту. Якщо потрібен доступ до порту, номер якого перевищує 255, то повинен бути використаний регістр DX. |
IN |
AL, im.byte/AL, DX AX, im.byte/AX, DX |
Поміщає дані з порту в AL або AX. Другий операнд - це номер порту. Якщо потрібен доступ до порту з номером більше 255, то потрібно використати регістр DX. |
Приклад використання команд IN\OUT:
mov al, 215 ; Write byte value "215"
out 115, al ; into the port 115:
mov ax, 1234 ; Write word value "1234"
out 117, ax ; into the port 117:
mov ax, 0 ; Reset:
in al, 110 ; port 110 into AL: ; Read byte from
in ax, 112 ; Read word from ; port 112 into AX:
Під’єднання пристроїв вводу-виводу здійснюється через порти вводу-виводу. В ролі портів можуть бути використані регістри або спеціальні мікросхеми. Однією з таких мікросхем є мікросхема паралельного програмованого інтерфейсу (ППІ) КР580ВВ55 (рис.1).
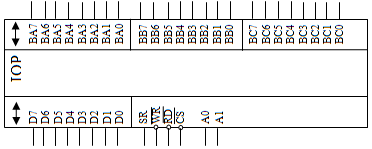
Рис.1. Умовне графічне позначення мікросхеми КР580ВВ55.
Призначення виводів мікросхеми наступне:
BA0 – BA7 – входи/виходи порту А;
BC0 – BC7 – входи/виходи порту С;
BB0 – BB7 – входи/виходи порту В;
D0 – D7 – входи/виходи даних;
![]() – читання;
L-рівень дозволяє зчитування
інформації з регістра,
адресованого по входах А0, А1
на шину D (7 – 0);
– читання;
L-рівень дозволяє зчитування
інформації з регістра,
адресованого по входах А0, А1
на шину D (7 – 0);
![]() – запис;
L-рівень сигналу дозволяє
запис інформації з шини
D (7 – 0) в регістр ППІ,
адресований по входах А0, А1;
– запис;
L-рівень сигналу дозволяє
запис інформації з шини
D (7 – 0) в регістр ППІ,
адресований по входах А0, А1;
![]() – вибір
мікросхеми; L- рівень
сигналу під'єднує ППІ до системної шини;
– вибір
мікросхеми; L- рівень
сигналу під'єднує ППІ до системної шини;
SR – скидання; H- рівень сигналу обнуляє RWC і встановлює всі канали в на ввід в режимі 0;
А1, А0 – входи для адресації внутрішніх регістрів ППІ.
На вхід
подається сигнал
![]() , а на вхід
- сигнал
, а на вхід
- сигнал
![]() з шини управління МПС.
з шини управління МПС.
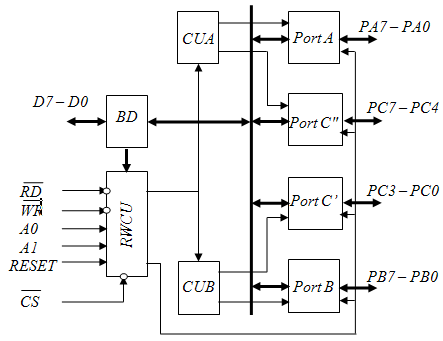
Структура мікросхеми КР580ВВ55 приведена на рис.2.
Рис.2. Структурна схема ВІС КР580ВВ55.
До складу ВІС ППІ (рис.2) входять:
двонаправлений 8-розрядний буфер даних Buffer of Data (BD), що з’єднує лінії даних ВІС із системною шиною даних;
блок керування читання / записом Read / Write Control Unit (RWCU), що забезпечує керування зовнішнім і внутрішнім передаванням даних і керуючих слів;
три 8-розрядні порти введення-виведення (Port A, Port B, Port C) для обміну інформацією, причому порт С поділений на два 4-розрядні порти: С’(PC7 – PC4) і С’’ (PC3 – PC04). Порти А і С’ об’єднані у групу А, порти В і С’’ об’єднані у групу В;
блоки керування групою А Control Unit A (CUA) та групою В Control Unit В (CUВ), що формують сигнали керування для відповідних груп;
Блок RWCU містить регістр керуючого слова (RCW –Register Control Word), який зберігає керуючі слова, що надходять від МП.
Мікросхема ППІ КР580ВМ80 має три режими роботи: режим 0 – основний режим введення-виведення через будь-який з портів; режим 1 – режим введення-виведення за стробом готовності через порти А і В, порт С використовується для передачі керуючих сигналів; режим 2 – режим двонаправленої передачі через порт A (порт В може працювати в режимі 0 або 1), порт С використовується для передачі керуючих сигналів.
У режимі 0 будь-який з портів може встановлюватися на ввід або вивід інформації. Порт С може бути розбитий на дві чотирьохрозрядні частини, і кожна з них може встановлюватися на ввід або вивід окремо. При цьому, якщо відбувається ввід інформації, то регістр порту (в порті А – вхідний регістр) неперервно слідкує за всіми змінами інформації на вході порту; якщо відбувається вивід інформації, то вміст регістру порту (в порті А – вихідного регістру) неперервно передається на вихід порту. Сигнали управління в цьому режимі не формуються.
В режимі 1 передача даних відбувається через порти А і В. Порт С використовується для прийому і видачі керуючих сигналів. Якщо, наприклад, порт А настроєний на ввід інформації в режимі 1, то одночасно з подачею на вхід порту А даних периферійний пристрій подає у відповідний розряд порту С сигнал Строб прийому порту А , сигналізуючи про видачу інформації. ППІ видачею сигналу Підтвердження сигналізує про те, що в регістр порту прийняті дані з периферійного пристрою.
В режимах 0 і 1 напрям передачі між портами ППІ і під’єднаними до них периферійними пристроями задається керуючим словом. Таким чином у вказаних режимах будь-яка зміна напряму передачі між ППІ і периферійними пристроями вимагає занесення нового керуючого слова в ППІ.
Особливість режиму 2 полягає в тому, що сигналами на вході і вході , які поступають в ППІ, не лише встановлюється напрям передачі між МП і ППІ, але ці сигнали задають також напрям передачі між ППІ і під’єднаними до нього периферійними пристроями. Таким чином, забезпечується можливість швидкої зміни напряму передачі інформації в цілому між МП і периферійними пристроями без необхідності пересилання в ППІ нового керуючого слова при кожній зміні напряму передачі. Це дає можливість у вказаному режимі під’єднувати через ППІ до МП пристрої, які можуть служити як пристроями вводу, так і виводу. У режимі 2 може працювати лише порт А.
Один з трьох режимів роботи ППІ задається керуючим словом режиму, яке може задавати різні режими для кожного з портів а також напрям передачі через кожен порт. Керуюче слово – це кодова комбінація, яка вводиться з МП у регістр керуючого слова ППІ (RCW). Формат керуючого слова режиму показаний на рис. 3.
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
1 |
M1 |
M2 |
IOA |
IOC’ |
M |
IOB |
IOC” |
Рис. 3. Формат керуючого слова режиму.
Окремі біти керуючого слова мають наступне призначення:
біти М1, М2 задають режим групи А: 00 – режим 0, 01 – режим 1, 1х – режим 2;
біт ІОА задає режим введення або виведення порту А (1 – введення інформації, 0 – виведення);
біт ІОC’ задає режим введення або виведення порту C’ (1 – введення інформації, 0 – виведення);
біт М задає режим роботи групи В (0 – режим 0, 1 – режим 1);
біт ІОВ задає режим введення або виведення порту B (1 – введення інформації, 0 – виведення);
біт IOC” задає режим введення або виведення порту C” (1 – введення інформації, 0 – виведення).
Сигналом RESET всі порти ППІ настроюються на виведення в режимі 0.
На рис. 4 приведене керуюче слово, яке встановлює режим 0 для всіх портів, причому порт А програмується на введення інформації, а порти В і С – на виведення.
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
Рис. 4. Формат керуючого слова заданого режиму.
С игнал
керування третім станом шини даних CS,
сигнал читання RD,
сигнал запису WR та
сигнал скидання RESET
подаються на блок RWCU
і разом із адресними сигналами А1,
А0 задають вид операції, що виконується
(табл.2).
игнал
керування третім станом шини даних CS,
сигнал читання RD,
сигнал запису WR та
сигнал скидання RESET
подаються на блок RWCU
і разом із адресними сигналами А1,
А0 задають вид операції, що виконується
(табл.2).
Комбінації сигналів на входах ВІС ППІ, які забезпечують різні операції вводу-виводу приведені в табл.2
Таблиця 2
Операція |
CS |
R D |
W R |
А1 |
А0 |
Запис керуючого слова із МП в RWCU Запис даних у порт А Запис даних у порт В Запис даних у порт С Зчитування даних із порту А Зчитування даних із порту В Зчитування даних із порту С Від’єднання ВІС від шини даних |
0
0 0 0 0 0 0 1 |
1
1 1 1 0 0 0 х |
0
0 0 0 1 1 1 х |
1
0 0 1 0 0 1 х |
1
0 1 0 0 1 0 х |
Примітка: х – будь-яке значення (0 або 1).
Комбінації керуючих сигналів (табл.3) і відповідних адресних сигналів поступають на входи ППІ під час виконання команд вводу-виводу через канали ППІ і забезпечують виконання відповідної операції.