

2.3 Выбор электромашинного усилителя
При выборе усилителя мощности следует соблюдать следующие условия:
Номинальная мощность усилителя должна удовлетворять неравенству:
![]() (2.15)
(2.15)
![]() (2.16)
(2.16)
Исходя из полученных данных, выберем ЭМУ-25А. Его характеристики представлены в таблице 2.2
Таблица 2.2
Uвых, В |
Pвых, КВт |
Iвых, А |
nу |
Ру , Вт |
Ly/Wy2(·10-6) Гн/вит2 |
Ткз,с |
rя, Ом |
rок, Ом |
rдп, Ом |
Rk.3 |
230 |
2,5 |
6,3 |
2.4 |
0,6 |
9,7 |
0,06 |
0,57 |
0,11 |
0,51 |
3,55 |
Параметры обмоток управления ЭМУ:
Wy=3400 витков; гу=985 Ом; IУном=22 мА; n=3000 об/мин
2.4 Выбор фазового детектора.
Фазочувствительный детектор осуществляет преобразование переменного напряжения измерительного устройства в постоянное, полярность которого изменяется с изменением фазы переменного напряжения.Фазовый детектор может быть выполнен на пассивных элементах - диодах, и на активных - транзисторах и операционных усилителях.В нашем случае выберем фазовый детектор на активных элементах. Коэффициент усиления такого детектора (Кфд) может быть от 0,6 до 10. Его величину выберем равной 3, т.е. Кфд=3.
3.Анализ динамики некорректированной следящей системы
3.1 Определение передаточных функций и параметров элементов системы.
3.1.1 Передаточная функция и параметры измерительного устройства.
Структурная схема измерительного устройства представлена на рисунке 3.1
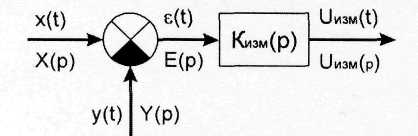
Рисунок 3.1 - Структурная схема измерительного устройства.
Если пренебречь индуктивностью и активным сопротивлением обмоток сельсинной пары, то измерительное устройство можно считать безинерционным (пропорциональным звеном), состоящим из элемента сравнения, осуществляющего вычитание ε(t)=x(t)-y(t) [в изображениях по Лапласу: ε(p)=X(p)-Y(p)], а также из преобразователя рассогласования ε(t) в напряжение Uизм(t), который можно представить функцией:
![]() ;
(3.1)
;
(3.1)
3.1.2 Передаточная функция и параметры электромашинного усилителя мощности
Структурная схема ЭМУ представлена на рисунке 3.4:
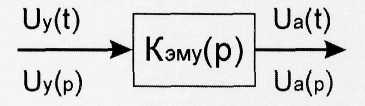
Рисунок 3.2 - Структурная схема ЭМУ
Передаточная функция ЭМУ с поперечным полем имеет вид:
![]() (3.2)
(3.2)
где Кэму - статический коэффициент усиления ЭМУ по напряжению; Ту - постоянная времени цепи управления; Ткз - постоянная времени короткозамкнутой цепи.
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
Коэффициент передачи в режиме холостого хода приближенно можно найти по номинальным данным:
![]() ,
(3.5)
,
(3.5)
где m – коэффициент, зависящий от мощности ЭМУ и равный 1,35;
![]() -
коэффициент, учитывающий нагрев обмотки
управления равный 1,15.
-
коэффициент, учитывающий нагрев обмотки
управления равный 1,15.
![]() (3.6)
(3.6)
Полученная передаточная функция ЭМУ:
![]() (3.7)
(3.7)
3.1.3 Передаточная функция и параметры исполнительного двигателя
Структурная схема исполнительного двигателя представлена на рисунке 3.5
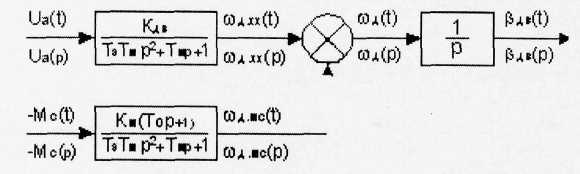
Рисунок 3.3 - Структурная схема исполнительного двигателя.
Передаточная функция двигателя имеет вид:
![]() (3.8)
(3.8)
где Кдв - статический коэффициент преобразования двигателя по скорости;
Тэ, Тм - электромагнитная и электромеханическая постоянные времени двигателя.
![]() (3.9)
(3.9)
Суммарную электромагнитную постоянную времени якорной цепи вычисляем по формуле:
![]() (3.10)
(3.10)
где Lя д – индуктивность якорной цепи ИД можно найти по формуле:
![]() ,
(3.11)
,
(3.11)
где
![]() ,
а p
– число полюсов.
,
а p
– число полюсов.
По аналогичной формуле вычисляется и Lя эму, т.о.:
![]() (3.12)
(3.12)
![]() (3.13)
(3.13)
Тогда Тя равно:
![]() (3.14)
(3.14)
Электромеханическую постоянную двигателя при работе от ЭМУ найдем по формуле:
![]() (3.15)
(3.15)
где J - момент инерции двигателя вместе с нагрузкой равен:
![]() (3.16)
(3.16)
Суммарное сопротивление якорной цепи ЭМУ и ИД найдем по формуле:
![]() (3.17)
(3.17)
Се, См – конструктивные постоянные исполнительного двигателя:
![]() (3.18)
(3.18)
![]() -
номинальные
параметры двигателя. Значение
-
номинальные
параметры двигателя. Значение
![]() для определения Тэм
не нужно, т.к. оно сократится. Поэтому,
учитывая, что в системе СИ Се=См,
получим:
для определения Тэм
не нужно, т.к. оно сократится. Поэтому,
учитывая, что в системе СИ Се=См,
получим:
![]() (3.19)
(3.19)
Используя значения, полученные в формулах, запишем передаточную функцию исполнительного двигателя в числовой форме:
 (3.20)
(3.20)
Исполнительный двигатель является звеном второго порядка. Для определения типа звена второго порядка запишем знаменатель выражения передаточной функции двигателя в следующем виде:
![]() ,
(3.21)
,
(3.21)
Откуда коэффициент
демпфирования
![]() равен:
равен:
![]() (3.22) Полученное значение декремента
затухания
больше 1,
следовательно, звено, образованное
исполнительным двигателем, является
апериодическим звеном второго порядка.
Запишем правую часть уравнения (3.21) в
таком виде:
(3.22) Полученное значение декремента
затухания
больше 1,
следовательно, звено, образованное
исполнительным двигателем, является
апериодическим звеном второго порядка.
Запишем правую часть уравнения (3.21) в
таком виде:
![]() ;
(3.23)
;
(3.23)
и вычислим корни полученного уравнения:
![]() (3.24)
(3.24)
![]() (3.25)
(3.25)
![]() (3.26)
(3.26)
Тогда уравнение (3.21) примет следующий вид:
 (3.27)
(3.27)
Соответственно передаточная функция двигателя примеет следующий вид:
 ;
(3.28)
;
(3.28)
3.1.4 Определение статического коэффициента усиления разомкнутой системы
Общий коэффициент передачи системы найдем по формуле:
![]() (3.29)
(3.29)
В соответствии с
заданными данными
![]() равен:
равен:
![]() (3.30)
(3.30)
3.1.5 Передаточная функция и параметры фазового детектора.
Структурная схема представлена на рисунке 3.2:

Рисунок 3.4 - Структурная схема фазового детектора
Если пренебречь индуктивностями и активными сопротивлениями в трансформаторах, а также если не предусмотрен сглаживающий фильтр, то фазовый детектор можно считать безинерционным звеном с передаточной функцией:
![]() (3.31)
(3.31)
3.1.6 Передаточные функции и параметры усилителя напряжения.
Структурная схема усилителя напряжения изображена на рисунке 3.3:
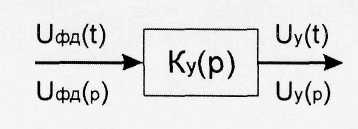
Рисунок 3.5 — Структурная схема усилителя напряжения
Если пренебречь инерционностью транзисторов, то усилитель напряжения
можно считать безинерционным (пропорциональным) звеном с передаточной
функцией:
![]() (3.32)
(3.32)
Статический коэффициент передачи усилителя найдем как отношение общего коэффициента передачи к произведению коэффициентов передачи измерительного устройства, ЭМУ, двигателя, редуктора и фазового детектора:
![]() (3.33)
(3.33)
3.1.7 Передаточная функция и параметры редуктора.
Структурная схема редуктора представлена на рисунке 3.6
Рисунок 3.6 - Структурная схема редуктора
Если считать, что момент инерции первой шестерни редуктора учтён в моменте инерции якоря двигателя, а момент инерции последующих шестерен уменьшается пропорционально квадрату передаточного числа и ими можно пренебречь, то редуктор можно считать безинерционным (пропорциональным) звеном с передаточной функцией:
![]() (3.34)
(3.34)
![]() (3.35)
(3.35)