

БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Факультет информационных технологий и робототехники
Кафедра программного обеспечения вычислительной техники
и автоматизированных систем
Профессор р.И.Фурунжиев
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
по курсу:
"ОПТИМИЗАЦИЯ ПРОЕКТИРОВАНИЯ
ТЕХНИЧЕСКИХ СИСТЕМ НА ЭВМ"
Минск - 2006
СОДЕРЖАНИЕ
|
|
|
|
|
Стр. |
|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ И ЗАДАНИЯ |
|
|
Работа 1. Разработка математических моделей и анализ динамики оптимизируемых систем. |
|
|
Работа 2. Моделирование внешней среды. |
|
|
Работа 3. Статистический анализ качества систем методом Монте- Карло. |
|
|
Работа 4. Оптимальное проектирование конечномерных систем (параметрическая оптимизация). |
|
|
Работа 5. Оптимальное проектирование бесконечномерных систем (систем управления). |
|
|
ЛИТЕРАТУРА |
|
|
ПРИЛОЖЕНИЯ Примеры копий экранов Образец титульного листа |
|
|
|
|
МЕТОДИЧЕСКИЕ УКАЗАНИЯ И ЗАДАНИЯ
В соответствии с календарным планом дисциплины "Оптимизация проектирования технических систем на ЭВМ" предусмотрено выполнение следующих лабораторных работ.
|
№№ работ |
Темы лабораторных работ |
Часов (план) |
|
|
1. |
Разработка математических моделей и анализ динамики оптимизируемых систем. |
8 |
|
|
2. |
Моделирование внешней среды. |
8 |
|
|
3. |
Статистический анализ качества систем методом Монте-Карло. |
4 |
|
|
4. |
Оптимальное проектирование конечномерных систем (параметрическая оптимизация). |
8 |
|
|
5. |
Оптимальное проектирование бесконечномерных систем (систем управления). |
8 |
|
|
|
Всего: |
36 |
|
Все лабораторные работы предусматривают изучение методов оптимального проектирования, разработку алгоритмов, программ и компьютерное моделирование. По каждой работе вычисления необходимо оформить в виде отдельных UNIT: Runge, Perturb, Monte-Сarlo, Optim, Contrl), не использующих формы. Затем эти UNIT используются в последующих работах.
Для всех работ необходимо:
1. Сформулировать цель работы.
2. Привести общую формулировку задачи.
2. Разработать математическую модель.
3. Выбрать метод и разработать алгоритм решения.
4. Разработать приложение и подготовить его к поставке.
5. Произвести компьютерное моделирование, используя созданное приложение на Delphi, с построением соответствующих таблиц и графиков.
6. Сделать выводы и обобщения.
7. Составить отчет.
Отчеты по всем лабораторным работам рекомендуется объединить в общий отчет. Перед печатанием электронный вариант отчета показать преподавателю для внесения коррекции.
При выполнении работ рекомендуется изучить соответствующие разделы учебного пособия [1]:
главу 9 - для выполнения работы 1;
главу 10 – для выполнения работ 2 и 3;
главу 11 - для выполнения работы 4.
Для выполнения работы 5 рекомендуется изучить соответствующий раздел конспекта либо работу [6].
Работа 1.
Разработка математических моделей
и анализ динамики оптимизируемых систем
Известные общие подходы к созданию математических моделей. Для многих динамических систем можно выделить фрагмент в виде двухмассовой колебательной системы, расчетная схема которой приведена на фиг.1.
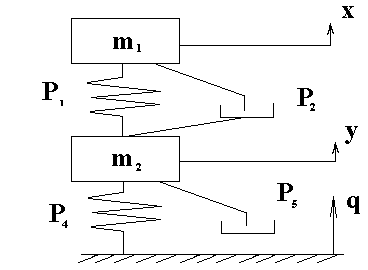
Фиг.1. Расчетная схема двухмассовой колебательной системы
Система находится в равновесии, поэтому
Рассматривая колебания системы
относительно положения статического
равновесия, в соответствии со вторым
законом Ньютона для фазовых координат
![]() (либо
(либо![]() и
и![]() )
можно записать:
)
можно записать:
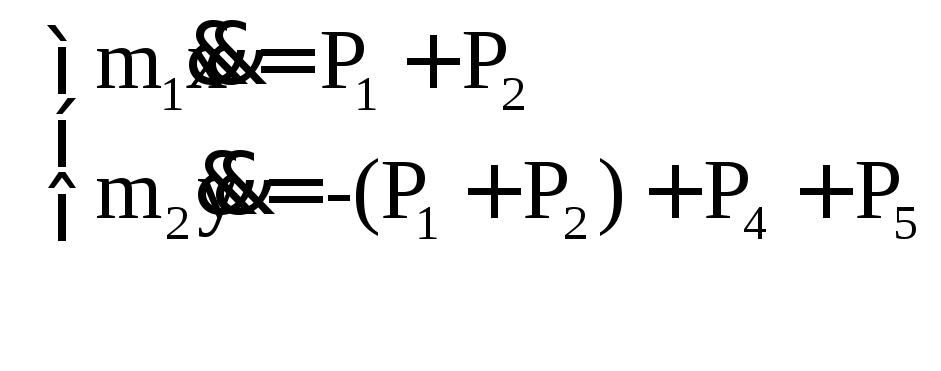 .
(1)
.
(1)
Начальные условия:
![]()
Здесь
![]() силы,
действующие на массы как показано на
расчетной схеме.
силы,
действующие на массы как показано на
расчетной схеме.
Пусть упругие силы пропорциональны деформациям, а диссипативные силы – скоростям соответствующих деформаций:
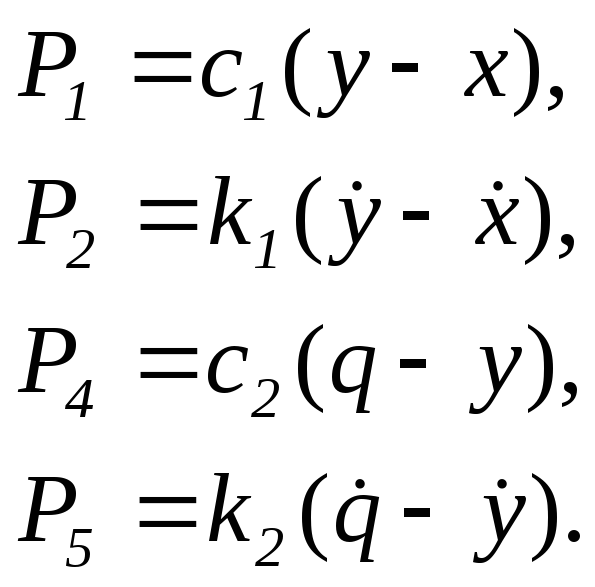
Тогда система (1) примет вид:

или

Введем
следующие обозначения:

![]()
Тогда систему уравнений (1) можно записать в виде:
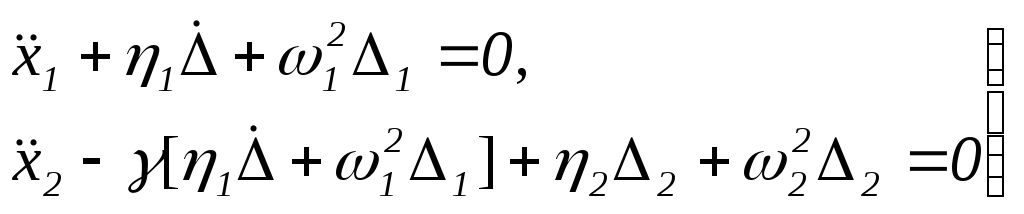 , (2)
, (2)
где
константы
![]() определяют
частотные свойства системы, а константы
определяют
частотные свойства системы, а константы
![]() диссипативные.
диссипативные.
Для численного интегрирования методом Рунге-Кутта четвертого порядка система (2) заменой переменных приводится к системе дифференциальных уравнений первого порядка [1, с.311].
Детерминированное (гармоническое) возмущение q(t) рекомендуется оформить в виде процедуры-функции:
Function q : Extended;
begin
q := q0 * sin(omega_q * t);
end;
а производную возмущения Dq(t) - в виде процедуры-функции:
Function Dq : Extended;
begin
Dq := q0 * omega_q * cos(omega_q * t);
end;
Здесь q0 и omega_q – амплитуда и частота гармонического возмущения соответственно.
Вычисление правых частей системы рекомендуется оформить в виде процедуры:
Procedure Deriv(x:Vector; var Dx:Vector);
begin
Dx[1] := x[2];
Dx[2] :=-eta1*(x[2]-x[4])-sqr(omega1)*(x[1]-x[3]);
Dx[3] := x[4];
Dx[4] := gamma*(eta1*(x[2]-x[4])+sqr(omega1)*(x[1]-
x[3])) -eta2*(x[4]-Dq)-sqr(omega2)*(x[3]-q);
end;