

Связи и их классификация
Система материальных точек называется свободной, если положение отдельных её точек и их скорости могут принимать произвольное значение. Несвободной - если на положение и скорости точек системы наложены ограничения геометрического или кинематического характера, называемыми связями.
Связями называют любого вида ограничения, налагаемые на положения (координаты) и скорости точек механической системы.
Конструктивно связи осуществляются в виде нитей, стержней, шарниров, опор, поверхностей и т.д. Аналитически связи выражаются уравнениями или неравенствами, т.е. соотношениями между радиус - векторами точек системы, их скорости и времени. Связи можно разделить на два типа: удерживающие (двухсторонние) и неудерживающие (односторонние). Удерживающими связями называются связи, которые сохраняют свое действие во все время движения точек системы. Аналитически эти связи выражаются уравнениями, связывающие координаты точек, их скорости и время
![]() ,
,
здесь
![]() - радиус
вектор, определяющий положение k-той
точки системы,
- радиус
вектор, определяющий положение k-той
точки системы,
![]() - ее
скорость, t
- время.
- ее
скорость, t
- время.
Примером удерживающей связи может служить система из двух материальных точек т1 и т2, которые соединены стержнем постоянной длины L. В этом случае уравнение связи имеет вид
![]() .
.
Неудерживающими связями называются связи, которые могут в некоторые промежутки времени меняться. Аналитически они выражаются неравенством, связывающим координаты точек системы, их скорости и время
![]() .
.
Примером неудерживающей связи может служить система из двух материальных точек, которые соединены гибкой нитью длинной L. В этом случае уравнение связи имеет вид
![]() /
/
В дальнейшем будем рассматривать только удерживающие связи.
С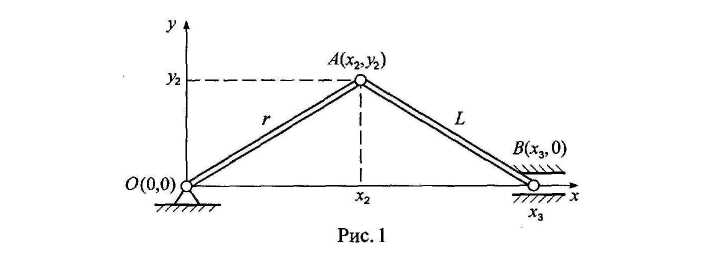 вязь
называется стационарной,
если
она не меняется с течением
времени. В уравнение стационарной связи
не входит время t
в
явном
виде.
вязь
называется стационарной,
если
она не меняется с течением
времени. В уравнение стационарной связи
не входит время t
в
явном
виде.
Примером механизма, имеющего стационарные связи, может служить кривошипно-шатунный механизм. Механизм состоит из кривошипа ОА длинной r, шатуна АВ длинной L и ползуна В.
Уравнения связи данного механизма запишутся:
![]() ,
,
![]() .
.
Первое уравнение определяет постоянную длину кривошипа, второе - постоянную длину шатуна.
Связь называется нестационарной, если она меняется с течением времени. Уравнение такой связи содержит время t явно.
Например, материальная точка может двигаться только по поверхности. Пусть уравнение поверхности задано в виде функции f(х,у,z) = 0. Это стационарная связь. Если поверхность подвижная или деформирующаяся, то в уравнение поверхности время г войдет явно: f(х,у,z,t) = 0. В этом случае связь нестационарная. Примером нестационарной связи является, также деформируемое твердое тело.
Связь называется конечной или геометрической, если она накладывает ограничения только на координаты точек системы. Уравнение конечной (геометрической) связи имеет вид
![]() .
.
Эта связь не налагает ограничение на скорости точек системы.
В общем случае удерживающая связь называется кинематической или дифференциальной. Эта связь налагает ограничения на положение координат точек системы и на скорости этих точек.
Если кинематическая (дифференциальная) связь интегрируется, то после интегрирования связь перестает быть таковой и становиться конечной (геометрической) связью. Следовательно, связь будет кинематической (дифференциальной) только в том случае, если она неинтегрируемая.
Система называется склерономной, если на нее наложены только стационарные связи. В противном случае система называется реономной.
Голономной называется всякая свободная система материальных точек, а также несвободная система с конечными или дифференциальными, но интегрируемыми связями. При наличии дифференциальных неинтегрируемых связей, система называется неголономной.
Р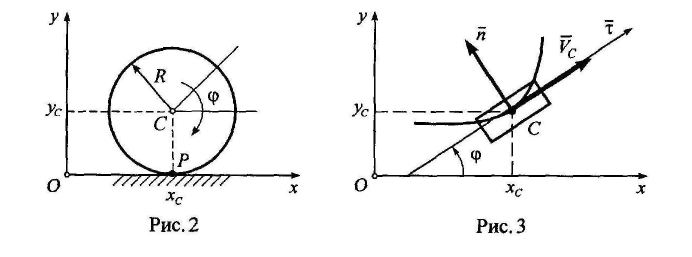 ассмотрим
пример голономной связи. Колесо радиуса
R
катиться
без скольжения по прямолинейному рельсу.
ассмотрим
пример голономной связи. Колесо радиуса
R
катиться
без скольжения по прямолинейному рельсу.
Положение колеса в плоскости движения хОу определяется координатами центра колеса (полюса) хс, ус и углом поворота φ. Если
ось Ох направить вдоль рельса, то ус = R, следовательно, наложено ограничение на координату у, связь - конечная (геометрическая).
Кроме
того, должна быть равна нулю скорость
точки Р,
точки
касания колеса с рельсом. Это условие
запишется в виде уравнения
![]() ..
Последнее уравнение накладывает
ограничения на скорости,
поэтому связь будет дифференциальной
(кинематической). Но
это уравнение сразу интегрируется и
приводит к соотношению между
координатами хс
и
φ,
имеющему вид хс=Rφ.
Таким
образом, рассмотренная
система является голономной.
..
Последнее уравнение накладывает
ограничения на скорости,
поэтому связь будет дифференциальной
(кинематической). Но
это уравнение сразу интегрируется и
приводит к соотношению между
координатами хс
и
φ,
имеющему вид хс=Rφ.
Таким
образом, рассмотренная
система является голономной.
В качестве примера неголономной связи рассмотрим движение конька по поверхности льда. При отсутствии скольжения вектор скорости центра тяжести конька С должен быть направлен по касательной к траектории движения - по оси т
Имеем:
![]()
![]() ,
где
φ
- угол, образованный осью
х
и
касательной к траектории движения в
точке С
- осью
,
где
φ
- угол, образованный осью
х
и
касательной к траектории движения в
точке С
- осью
![]() .
Разделив
второе соотношение на первое, получим
.
Разделив
второе соотношение на первое, получим
![]() ,
откуда
,
откуда
![]() .
Таким
образом получено уравнение, накладывающее
ограничения
на скорость. Это уравнение не может быть
проинтегрировано,
поскольку угол φ
- переменный (угол φ=φ(t)
определяет направление
оси
,
поэтому это уравнение является уравнением
неголономной
связи.
.
Таким
образом получено уравнение, накладывающее
ограничения
на скорость. Это уравнение не может быть
проинтегрировано,
поскольку угол φ
- переменный (угол φ=φ(t)
определяет направление
оси
,
поэтому это уравнение является уравнением
неголономной
связи.