

Принцип д'Аламбера для механической системы
Рассмотрим
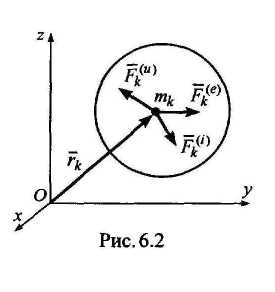
материальную точку массой тk
системы,
состоящей из
N
точек.
Обозначим ускорение этой точки ak,
равнодействующую
внешних сил через
![]() ,
равнодействующую внутренних сил,
приложенных к той же точке через
,
равнодействующую внутренних сил,
приложенных к той же точке через
![]() .
Реакции
связей входят в
.
Тогда принцип Д'Аламбера
будет иметь вид
.
Реакции
связей входят в
.
Тогда принцип Д'Аламбера
будет иметь вид
![]() ,
,
где
![]() .
.
Складывая почленно полученные уравнения для всех N точек, получим
![]() k
= l,2,...,N.
k
= l,2,...,N.
В
этом уравнении первая сумма равна
главному вектору
![]() внешних
сил, приложенных к системе; вторая сумма
равна нулю, поскольку геометрическая
сумма всех внутренних сил системы равна
нулю; последняя - главному вектору
сил
инерции. Таким
образом,
внешних
сил, приложенных к системе; вторая сумма
равна нулю, поскольку геометрическая
сумма всех внутренних сил системы равна
нулю; последняя - главному вектору
сил
инерции. Таким
образом,
![]() ,
,
т.е. в каждый момент времени сумма главных векторов внешних сил и сил инерции движущейся системы равна нулю.
Выберем
произвольный полюс О
и
проведем
из него к точке тк
радиус-вектор
![]() .
Умножая каждое слагаемое
принципа Д'Аламбера
векторно на соответствующий радиус-вектор
слева
и складывая
все N
полученных
таким образом уравнений, имеем
.
Умножая каждое слагаемое
принципа Д'Аламбера
векторно на соответствующий радиус-вектор
слева
и складывая
все N
полученных
таким образом уравнений, имеем
![]() ,
k
= l,2,...,N
,
k
= l,2,...,N
Первая
сумма равна главному моменту
![]() внешних сил, приложенных
к системе; вторая сумма равна нулю, а
последняя -главному
моменту
внешних сил, приложенных
к системе; вторая сумма равна нулю, а
последняя -главному
моменту
![]() сил инерции. Следовательно,
сил инерции. Следовательно,
![]() ,
,
т.е. в каждый момент времени сумма главных моментов внешних сил и сип инерции движущейся механической системы равна нулю.
Двум векторным уравнениям соответствуют шесть уравнений в проекциях на оси декартовых координат
![]() ,
, ![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]()
Движение твердого тела, как частный случай механической системы, вполне определяется этими шестью уравнениями. Если рассматривается система, состоящая из нескольких тел, то можно составить соответствующие уравнения для каждого тела в отдельности.
Главный вектор сил инерции механической системы
Вычислим главный вектор сил инерции. Имеем

Сумма
![]() ,
где
rc
- радиус-вектор
центра масс системы, следовательно,
,
где
rc
- радиус-вектор
центра масс системы, следовательно,
![]() ,
,
т.е. главный вектор сил инерции системы равен произведению массы всей системы на ускорение центра масс, приложен в точку центра масс и направлен противоположно вектору ас.
Главный вектор сил инерции твердого тела
Твердое тело является частным случаем механической системы. Следовательно, главный вектор сил инерции твердого тела находится также как и для механической системы.
Тогда проекции главного вектора на декартовые оси координат имеют вид
![]() ,
,
![]() ,
,
![]() ,
,
здесь хс, yc, zc - координаты центра масс тела.
Если тело движется прямолинейно по си х, то
![]() ,
,
![]() ,
,
![]() .
.
Главный момент сил инерции механической системы
Вычислим главный момент сил инерции системы.
Имеем
 , k
= 1,2,..,N;
, k
= 1,2,..,N;
так
как
![]() ,
преобразуем
правую часть
,
преобразуем
правую часть

Здесь
![]() -
кинетический момент системы.
-
кинетический момент системы.
Подставляя полученное выражение в теорему об изменении кинетического момента, получаем значение главного момента сил инерции
Главный момент сил инерции твердого тела, вращающегося вокруг неподвижной оси
В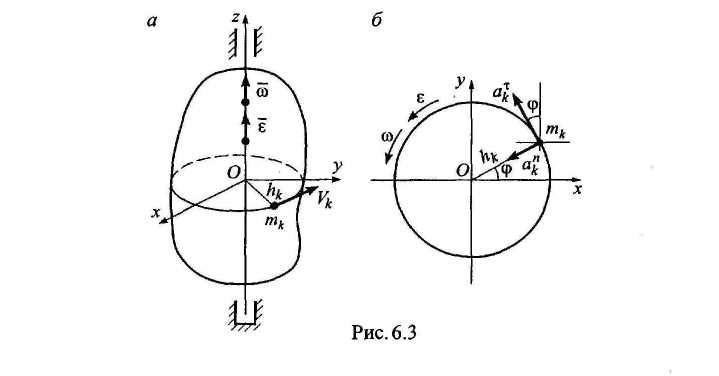 ычислим
координаты главного момента сил инерции
твердого тела, вращающегося вокруг
неподвижной оси. Ось Oz
совместим
с осью вращения, а оси Ох
и
Оу
скрепим
с вращающимся телом,
тогда
ычислим
координаты главного момента сил инерции
твердого тела, вращающегося вокруг
неподвижной оси. Ось Oz
совместим
с осью вращения, а оси Ох
и
Оу
скрепим
с вращающимся телом,
тогда
![]() (0,0,ε)
и
(0,0,ε)
и
![]() (0,0,ω),
rk(xk;yk;zk)
-
радиус-вектор рассматриваемой
точки тк.
При
вращении тела вокруг неподвижной оси
Oz
ускорение
любой точки тк
состоит
из нормального ускорения
(0,0,ω),
rk(xk;yk;zk)
-
радиус-вектор рассматриваемой
точки тк.
При
вращении тела вокруг неподвижной оси
Oz
ускорение
любой точки тк
состоит
из нормального ускорения
![]() и
касательного ускорения
и
касательного ускорения
![]() ,
где
hk
- расстояние
точки k
от
оси вращения Oz:
,
где
hk
- расстояние
точки k
от
оси вращения Oz:
![]() ;
;
![]() ;
;
![]() .
.
Здесь учтено, что hkcosφ = xk , hksinφ = ук, хк и ук - координаты точки тк.
Тогда, согласно (6.12), получим,
![]()
![]()
![]()
![]()
Здесь Jxz, Jyz - центробежные моменты инерции, Jz - осевой момент инерции.
Таким образом, главный момент сил инерции твердого тела, вращающегося вокруг неподвижной оси, сводится к паре сил, момент которой равен
![]()
где
![]() ,
, ![]() ,
, ![]()
Если ось вращения проходит через центр тяжести тела и оси Oxyz являются главными осями, то
![]() ,
,
![]() ,
,
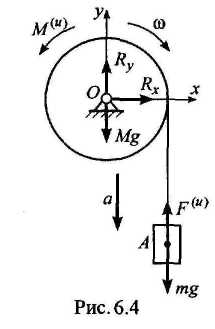 Пример
3.
Через
блок весом Mg
и
радиусом
R
перекинута
нерастяжимая нить, на конце которой
подвешен груз А
весом
mg.
Определить
ускорение а
груза
А,
натяжение
нити Т
и
давление на подшипник оси блока.
Пример
3.
Через
блок весом Mg
и
радиусом
R
перекинута
нерастяжимая нить, на конце которой
подвешен груз А
весом
mg.
Определить
ускорение а
груза
А,
натяжение
нити Т
и
давление на подшипник оси блока.
Решение. Пусть груз А опускается вниз, тогда сила инерции груза вверх: Fи = ma.
Поскольку
ось вращения диска является осью
симметрии, то Jxz=Jyz
= 0. Следовательно,
момент
от сил инерции, равен
![]() и
направлен в сторону противоположную
вращению диска.
и
направлен в сторону противоположную
вращению диска.
Отбросим опору О, заменим ее действие реакциями подшипника Rx и Ry. Составим уравнения кинетостатики:
![]() ,
, ![]() ;
;
![]() ,
, ![]() ;
;
![]() ,
, ![]() .
.
Подставим в последнее уравнение значения силы инерции F(u)=ma и момента от сил инерции = (J/R)a, где t = a/R, и решим его относительно ускорения а.
Получим
![]() ,
, ![]() .
.
Тогда из первых двух уравнений (а) определим
 ,
, ![]()
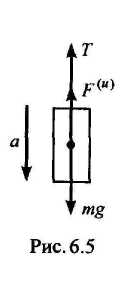
Для определения натяжения нити разорвем гибкую связь и заменим ее действие натяжением Т. Добавляя внешнюю силу mg и силу инерции F(и), имеем
-mg+F(u)+T = 0,
откуда
T
= mg-
F(и)
= m(g
-
а)
=
![]() .
.
Если считать диск сплошным телом, то Jz - —mR2, тогда
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Лекция 16 (Аналитическая механика)
«Связи и их классификация. Обобщенные координаты,
Работа силы на возможном перемещении»
В основу классической механики положены понятия пространства, времени, силы и массы. Она оперирует векторными величинами, векторными уравнениями и их проекциями на координатные оси. Аналитическая механика построена на основных принципах, основанных на сравнении движений. Этот принцип изучает мгновенное состояние движения и возможные отклонения от этого состояния, допускаемые связям в данный момент времени. В аналитической механике широко применяются скалярные меры движении материальных объектов и меры их действия (кинетическая энергия, работа сил и т.д.).
Основы изложения аналитической механики составляют некоторые общие принципы, из которых аналитическим путем получаются дифференциальные законы движения на основе которых изучается движение твердых тел и системы материальных точек.