

Лекция 20 очувствление Введение
Очувствление необходимо для взаимодействия робота с внешней средой в интерактивном режиме. Очувствленные обучаемые системы обладают возможностью адаптации при выполнении широкого круга задач. Благодаря этому повышается степень универсальности, что в конечном счете приводит к снижению стоимости продукции и технического обслуживания.
Функционально органы очувствления роботов – датчики – можно подразделить на два основных типа:
датчики внутреннего состояния;
датчики внешнего состояния.
Датчики внутреннего состояния служат для формирования сигналов в цепях обратных связей по положению и скорости звеньев манипулятора, по силе и моменту.
Датчики внешнего состояния предназначены для измерения параметров в дальней и ближней зонах и для тактильных измерений. Подразделяются на контактные и бесконтактные. Контактные датчики производят измерение при контакте с объектом в процессе касания, проскальзывания или кручения. Принцип действия бесконтактных датчиков основан на определении изменений акустического или электромагнитного полей взаимодействия с объектом.
Наиболее важными примерами использования бесконтактных датчиков является измерение положения объекта в дальних и ближних зонах, а также определение характеристик объекта оптическим методом.
Датчики измерения в дальней зоне
Назначение – определение расстояния от точки отсчета до объекта в рабочем диапазоне измерений. Датчики измерения в дальней зоне используются для навигации робота и обхода препятствий, когда требуется оценить расстояние до ближайших объектов или определить местоположение и форму объектов в рабочем пространстве робота.
Триангуляция
Одним из простейших методов измерения в дальней зоне является метод триангуляции (рис. 20.1). Объект освещают узким пучком света, направленным на его поверхность.
Движение пучка света в плоскости определяется линией от объекта до приемника света и линией от приемника до источника света. Если пятно света на поверхности объекта достаточно мало, расстояние D до освещенного участка поверхности может быть вычислено из геометрических соотношений, представленных на рис. 20.1. Этот метод реализует точечное измерение. Если система «источник-приемник» движется в фиксированной плоскости, то в этом случае можно получить группу точек, расстояния которых до приемника известны. Эти расстояния легко перенести в трехмерную систему координат путем сканирования.
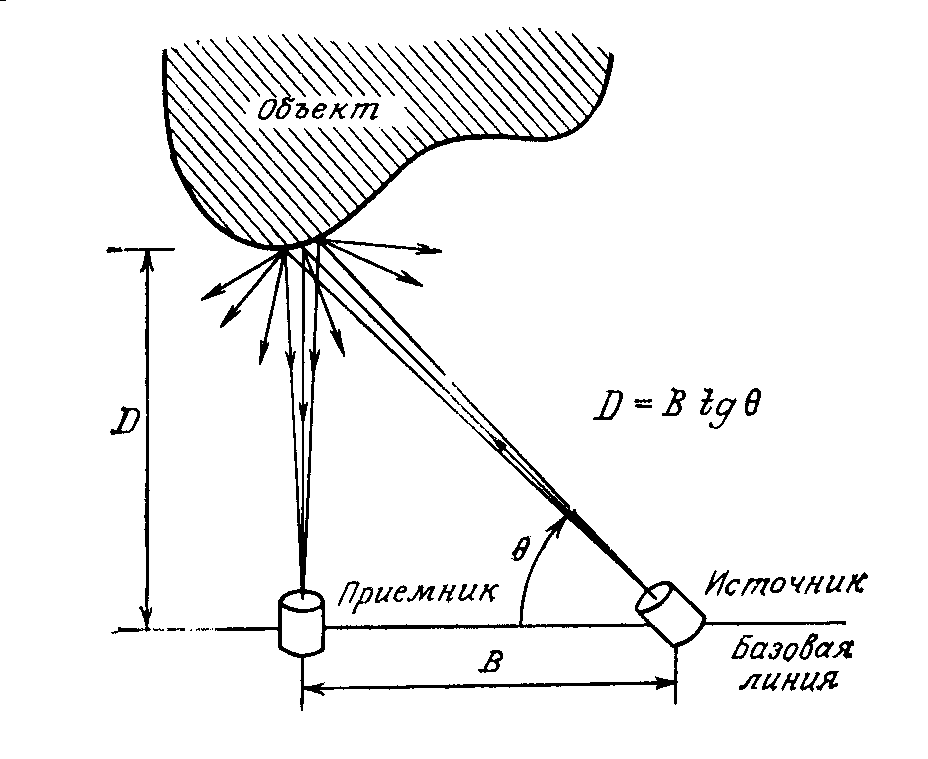
Рисунок 20.1. Измерение расстояние триангуляционным методом
Метод подсветки
Данный метод состоит в проецировании светового потока на группу объектов и использовании изменения формы потока для вычисления расстояния (рис. 20.2).
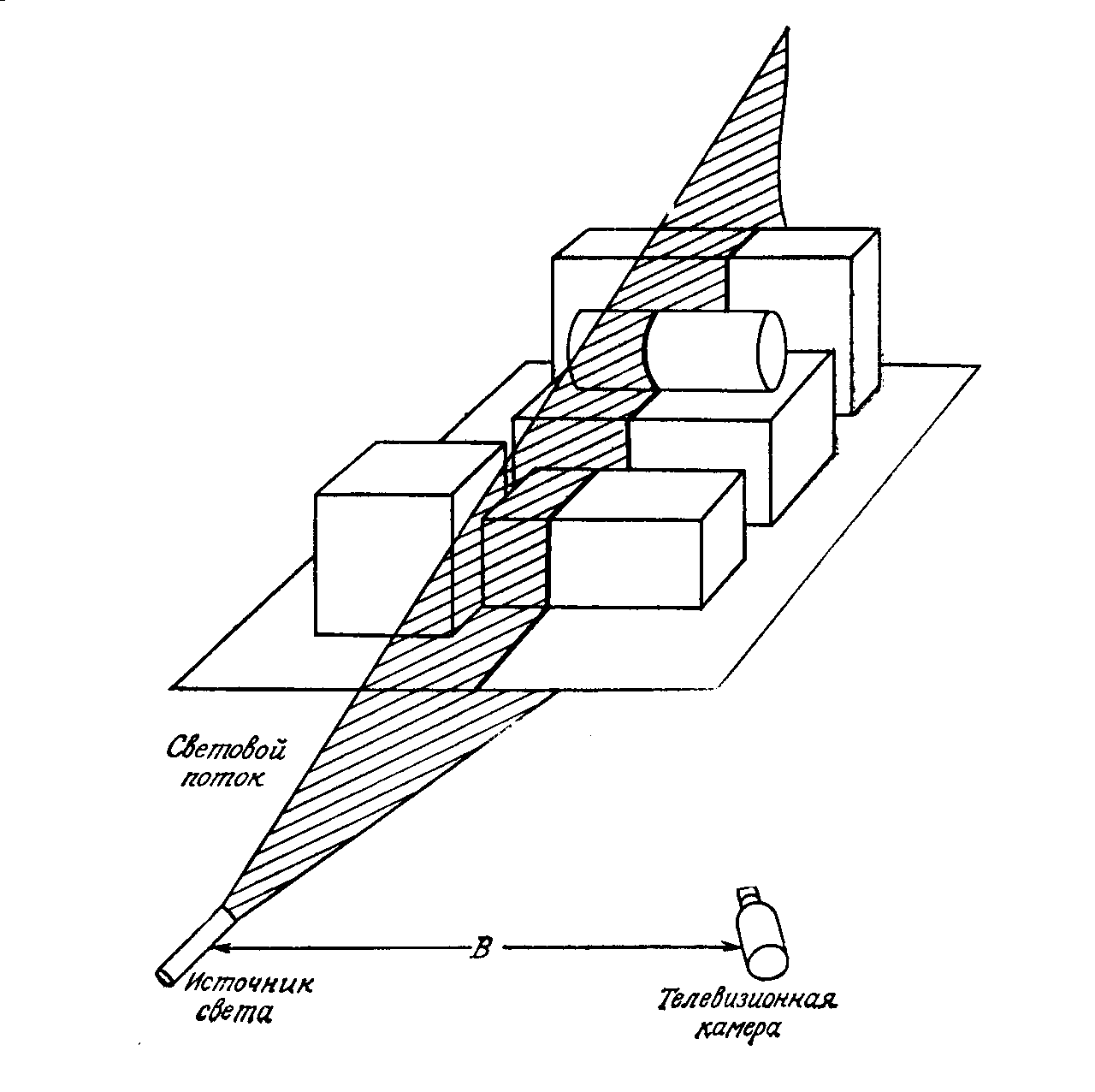
Рисунок 20.2. Измерение расстояний методом подсветки
Световая полоса, пересекающая группу предметов, формируется в виде плоского пучка света с помощью цилиндрических линз. Пересечение светового потока с объектами в рабочем пространстве фиксируется телевизионной камерой, помещенной на расстоянии В от источника света. Такая ситуация легко анализируется компьютером при определении расстояния. Например, отклонение пучков света указывает на изменение поверхности, а разрыв соответствует промежутку между поверхностями.
Для получения базовых значений расстояний вначале проводят калибровку (рис. 20.3).
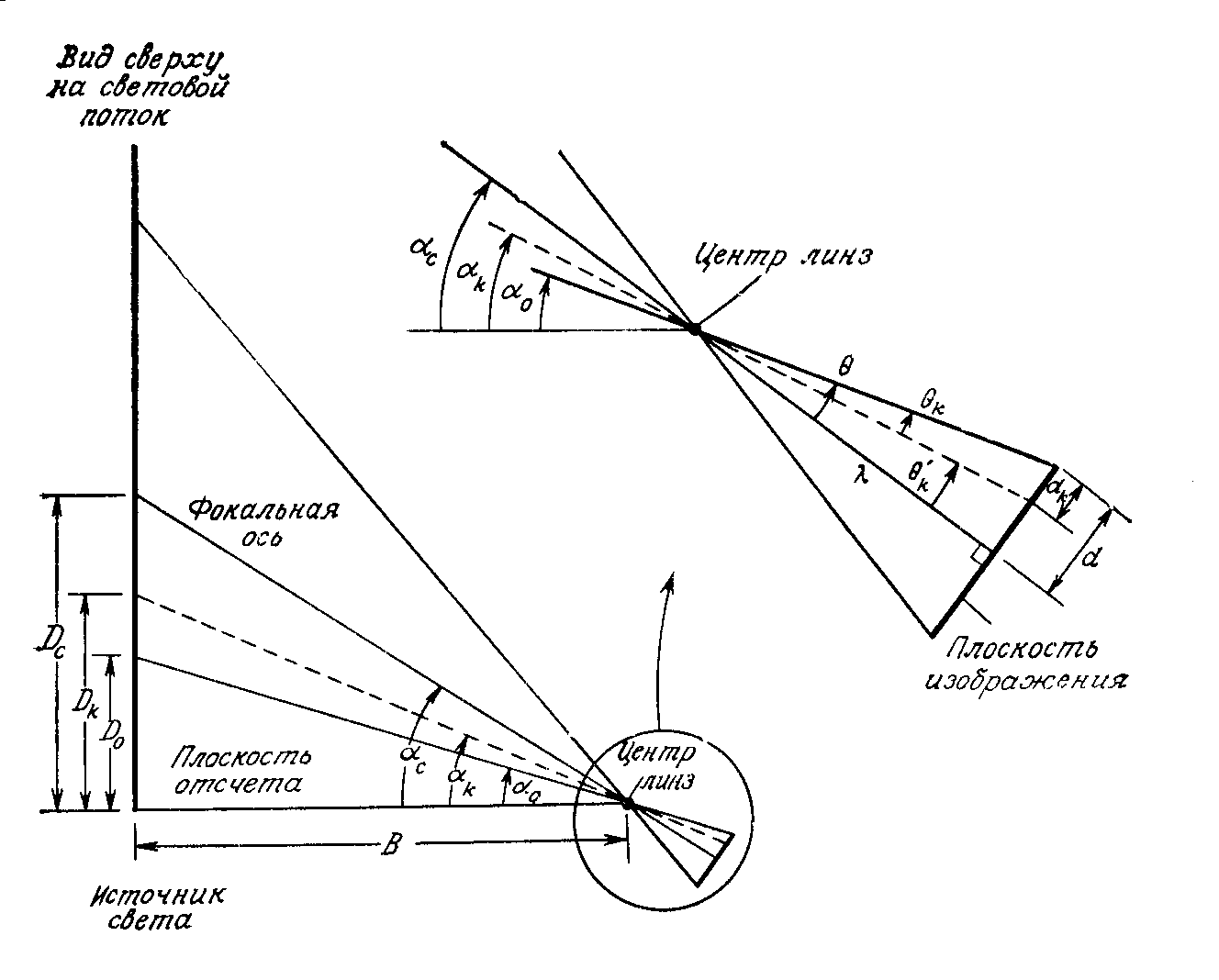
Рисунок 20.3. Калибровка системы измерения методом подсветки
В большинстве
систем, основанных на методе подсветки,
используют цифровые изображения,
полученные телекамерой и преобразованных
в цифровой массив размерностью N×M.
Пусть
![]() является номером столбца этого массива.
Калибровка состоит в измерении расстоянияВ
между источником света и центром линз
и последующим измерением углов
является номером столбца этого массива.
Калибровка состоит в измерении расстоянияВ
между источником света и центром линз
и последующим измерением углов
![]() и
и![]() .
Тогда расстояниеd
вычисляется
по формуле:
.
Тогда расстояниеd
вычисляется
по формуле:
![]() ,
(20-1)
,
(20-1)
где
![]() -
фокальная длина линз, а
-
фокальная длина линз, а
![]() .
(20-2)
.
(20-2)
Для цифрового
изображения, содержащего М
столбцов, приращение растояния
![]() между
столбцами определяется по формуле:
между
столбцами определяется по формуле:
![]() (20-3)
(20-3)
для
![]() .
В изображении на мониторе
.
В изображении на мониторе![]() соответствовало бы крайнему слева
столбцу, а
соответствовало бы крайнему слева
столбцу, а![]() - центральному столбцу.
- центральному столбцу.
Угол
![]() ,
образованный проекцией произвольной
полосы, легко получить, отметив, что:
,
образованный проекцией произвольной
полосы, легко получить, отметив, что:
![]() ,
(20-4)
,
(20-4)
где
![]() ,
(20-5)
,
(20-5)
или, используя равенство (20-3),
![]() ,
(20-6)
,
(20-6)
где
![]() .
.
Для оставшихся значений k (т.е. по другую сторону оптической оси) имеем:
![]() ,
(20-7)
,
(20-7)
где
![]() (20-8)
(20-8)
для
![]() .
.
Сравнивая
уравнения (20-6) и (20-8), отметим, что
![]() .
Таким образом, равенства (20-4) и (20-7)
идентичны для всего диапазона
.
Таким образом, равенства (20-4) и (20-7)
идентичны для всего диапазона![]() .
Тогда из рис. 20.3 следует, что расстояние
по нормали
.
Тогда из рис. 20.3 следует, что расстояние
по нормали![]() между
произвольной полосой света и плоскостью
отсчета будет равно:
между
произвольной полосой света и плоскостью
отсчета будет равно:
![]() (20-9)
(20-9)
для
![]() ,
где
,
где![]() вычисляется либо из уравнения (20-4), либо
из уравнения (20-7).
вычисляется либо из уравнения (20-4), либо
из уравнения (20-7).
Важно отметить,
что если величины
![]() известны, номер столбца в цифровом
изображении полностью определяет
расстояние между плоскостью отсчета и
всеми точками на полосе, отображенной
на этом столбце.
известны, номер столбца в цифровом
изображении полностью определяет
расстояние между плоскостью отсчета и
всеми точками на полосе, отображенной
на этом столбце.
Для определения
![]() плоскую вертикальную поверхность
размещают так, чтобы ее пересечение со
световой полосой находилось в центре
плоскости изображения (т.е.у=М/2).
Затем измеряют величину перпендикуляра
плоскую вертикальную поверхность
размещают так, чтобы ее пересечение со
световой полосой находилось в центре
плоскости изображения (т.е.у=М/2).
Затем измеряют величину перпендикуляра
![]() между
поверхностью и плоскостью отсчета. Из
рис. 20.3 следует, что:
между
поверхностью и плоскостью отсчета. Из
рис. 20.3 следует, что:
![]() .
(20-10)
.
(20-10)
Чтобы определить
![]() ,
перемещают поверхность ближе к плоскости
отсчета, пока ее световая полоса не
совместится су=0
на плоскости изображения. Затем измеряют
,
перемещают поверхность ближе к плоскости
отсчета, пока ее световая полоса не
совместится су=0
на плоскости изображения. Затем измеряют
![]() и из рис. 20.3 находят:
и из рис. 20.3 находят:
![]() .
(20-11)
.
(20-11)
Это завершает процесс калибровки.
Основное
преимущество такой системы состоит в
относительной простоте измерения
расстояний. После завершения калибровки
расстояние, соответствующее каждому
столбцу в изображении, вычисляется с
помощью уравнения (20-9), где
![]() ,
а результаты хранятся в памяти. Затем
в процессе измерений расстояние до
любой точки изображения получают путем
простого определения номера ее столбца
в изображении и обращения к соответствующей
области памяти.
,
а результаты хранятся в памяти. Затем
в процессе измерений расстояние до
любой точки изображения получают путем
простого определения номера ее столбца
в изображении и обращения к соответствующей
области памяти.