

Представление Денавита – Хартенберга
Для описания вращательных и поступательных связей между соседними звеньями Денавит и Хартенберг предложили матричный метод последовательного построения систем координат, связанных с каждым звеном кинематической цепи. Смысл представления Денавита–Хартенберга (ДХ-представление) состоит в формировании однородной матрицы преобразования, имеющей размерность 4×4 и описывающей положение системы координат каждого звена относительно системы координат предыдущего звена. Это дает возможность последовательно преобразовать координаты схвата манипулятора из системы отсчета, связанной с последним звеном, в базовую систему отсчета, являющейся инерциальной системой координат для рассматриваемой динамической системы.
Каждая система координат формируется на основе следующих трех правил:
1) ось zi-1направлена вдоль оси i–го сочленения;
2) ось xi перпендикулярна оси zi-1 и направлена от нее;
3) ось yi дополняет оси xi, zi до правой декартовой системы координат.
ДХ–представление твердых звеньев зависит от четырех геометрических параметров, соответствующих каждому звену. Эти четыре параметра полностью описывают любое вращательное или поступательное движение и определяются в соответствии с рис. 5.4 следующим образом:
i – присоединенный угол, на который надо повернуть ось xi-1вокруг оси zi-1, чтобы она стала сонаправлена с осью xi (знак определяется в соответствии с правилом правой руки);
di - расстояние между пересечением оси zi-1 с осью xi и началом (i-1)-й системы координат, отсчитываемое вдоль оси zi-1 ;
ai - линейное смещение – расстояние между пересечением оси zi-1 с осью xi и началом i-й системы координат, отсчитываемое вдоль оси xi, т. е. кратчайшее расстояние между осями zi-1 и zi;
αi - угловое смещение - угол, на который надо повернуть ось zi-1 вокруг оси xi, чтобы она стала сонаправленной с осью zi (знак определяется в соответствии с правилом правой руки).
Для вращательных сочленений параметры di, ai и αi являются характеристикамисочленения, постоянными для данного типа робота. В то же время i является переменной величиной, изменяющейся при движении (вращении) i-го звена относительно (i-1)-го.
Алгоритм формирования систем координат звеньев
Для каждого звена манипулятора с n степенями свободы этот алгоритм формирует ортонормированную систему координат. Системы координат нумеруются в порядке возрастания от основания к схвату манипулятора. Взаимное расположение соседних звеньев описывается однородной матрицей преобразования размерностью 4х4.
|
Параметры систем координат звеньев манипулятора Пума | |||||
|
Сочленение i |
|
|
|
|
Пределы измерения |
|
1 |
90 |
-90 |
0 |
0 |
-160-+160 |
|
2 |
0 |
0 |
431,8 мм |
149,09 мм |
-225-45 |
|
3 |
90 |
90 |
-20,32 мм |
0 |
-45-225 |
|
4 |
0 |
-90 |
0 |
433,07 мм |
-110-170 |
|
5 |
0 |
90 |
0 |
0 |
-100-100 |
|
6 |
0 |
0 |
0 |
56,25 мм |
-266-266 |
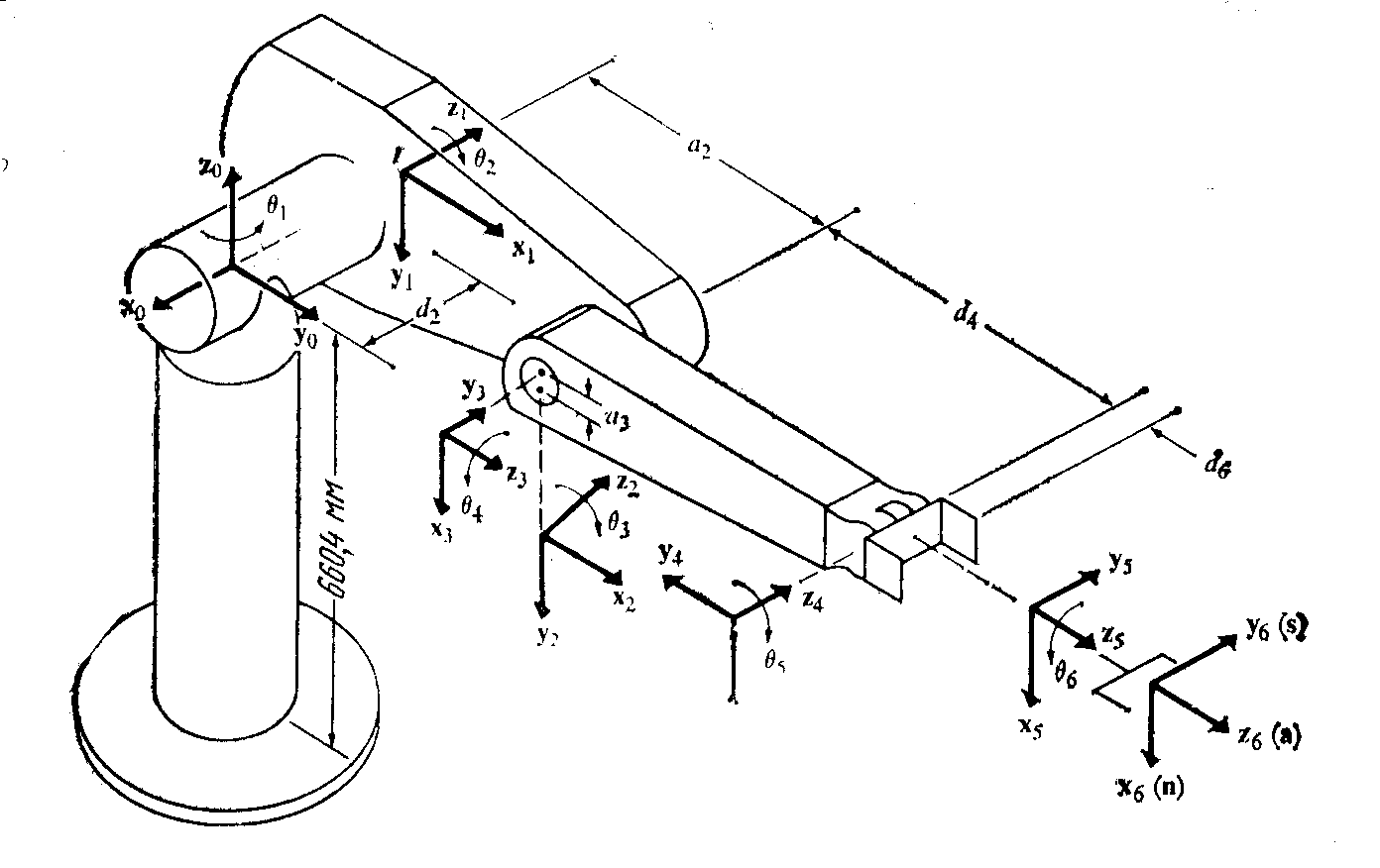
Рисунок 5.4. Формирование систем координат звеньев
Для манипулятора Пума
Шаг 1. Формирование базовой системы координат.
Сформировать правую ортонормированную систему координат (х0, y0, z0), связанную с основанием, ось z0 вдоль оси 1-го сочленения к «плечу» манипулятора. Оси х0 и y0 выбираются произвольно при условии их перпендикулярности оси z0.
Шаг 2. Начало и цикл. Для всех i ( i=1,2 … n-1) выполнить шаги 3-6.
Шаг 3. Формирование осей сочленения. Направить ось zi вдоль оси движения (вращательного или поступательного) i+1-го сочленения.
Шаг 4. Формирование начала i-й системы координат. Расположить начало i-й системы координат на пересечении осей zi и zi-1 или на пересечении общей нормали к осям zi и zi-1 с осью zi.
Шаг 5. Формирование оси xi. Выбрать единичный вектор xi следующим образом: xi = ±( zi-1 × zi)/ || zi-1 × zi || или вдоль общего перпендикуляра к осям zi-1 и zi, если они параллельны.
Шаг 6. Формирование оси yi Положить yi = +( zi × xi)/ ||zi ×xi|| , получив тем самым правостороннюю систему координат.
Шаг 7. Формирование системы координат схвата. Как правило, n-е сочленение является вращательным. Сформировать ось zn, направив ее вдоль оси zn-1 и от робота. Выбрать ось хn так, чтобы она была перпендикулярна осям zn-1 и zn.
Шаг 8. Определение параметров звеньев и сочленений. Для каждого i
(i =1…n) выполнить шаги 9-12.
Шаг 9. Определение di Расстояние di – от начала (i-1)-й системы координат до пересечения оси zi-1 с осью xi и началом i-й системы координат, отсчитываемой вдоль оси zi-1. Если i-е соединение – поступательное, то di – присоединенная переменная.
Шаг 10. Определение ai - расстояния между пересечением оси zi-1 с осью xi и началом i-й системы координат, отсчитываемой вдоль оси xi.
Шаг 11. Определение i – угла поворота оси xi -1 вокруг оси zi-1, чтобы она стала сонаправлена с осью xi. Если i-е сочленение – вращательное, то i-присоединенная переменная.
Шаг 12. Определение αi – угла поворота оси zi -1 вокруг оси xi, чтобы она стала сонаправлена с осью zi .
После построения ДХ-координат для всех звеньев можно построить однородные матрицы преобразования, связывающие i-ю и (i-1)-ю системы координат:
i-1Ai=
Tz,dTz,Tx,aTx,α=
 ×
×
× =
=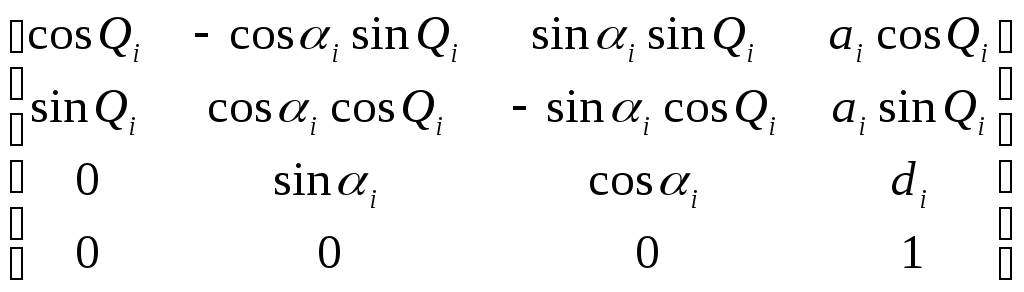 .
(5-1)
.
(5-1)
Преобразуя (3-1), найдем, что матрица, обратная к i-1Аi, имеет вид:
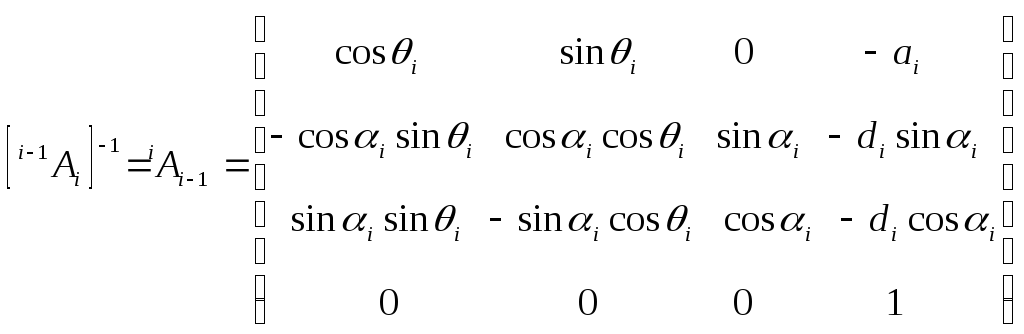 ,
(5-2)
,
(5-2)
где
![]() -
константы, а
-
константы, а![]() -
присоединенная переменная, если
рассматриваемое сочленение – вращательное.
-
присоединенная переменная, если
рассматриваемое сочленение – вращательное.
Используя
матрицу
![]() ,
можно связать однородные координатырi
точки р
относительно i-й
системы координат (точка р
покоится в i–й
системе координат)с односторонними
координатами этой точки относительно
(i-1)-й
системы тсчета, связанной с (i-1)-м
звеном. Эта связь устанавливается
равенством:
,
можно связать однородные координатырi
точки р
относительно i-й
системы координат (точка р
покоится в i–й
системе координат)с односторонними
координатами этой точки относительно
(i-1)-й
системы тсчета, связанной с (i-1)-м
звеном. Эта связь устанавливается
равенством:
![]() ,
(5-3)
,
(5-3)
где
![]() и
и![]() .
.
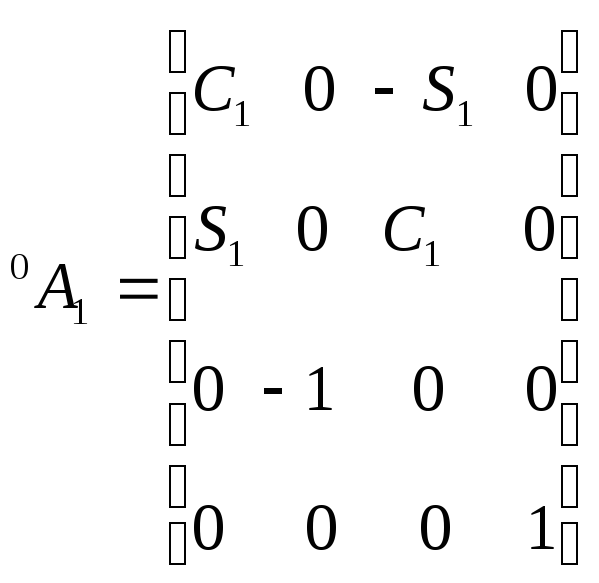
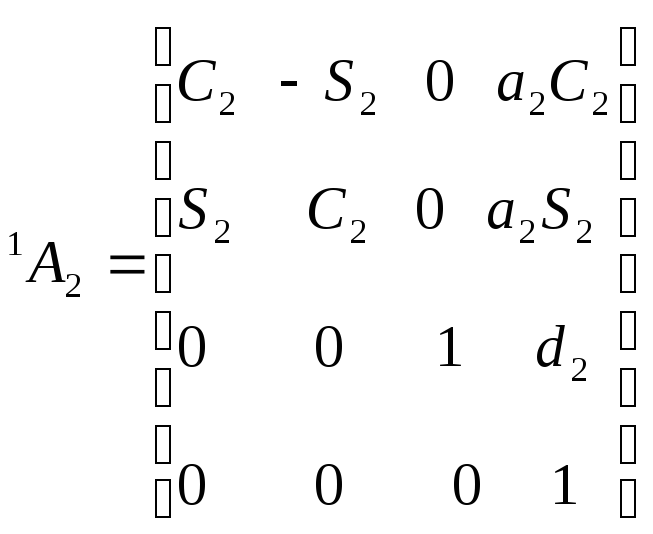
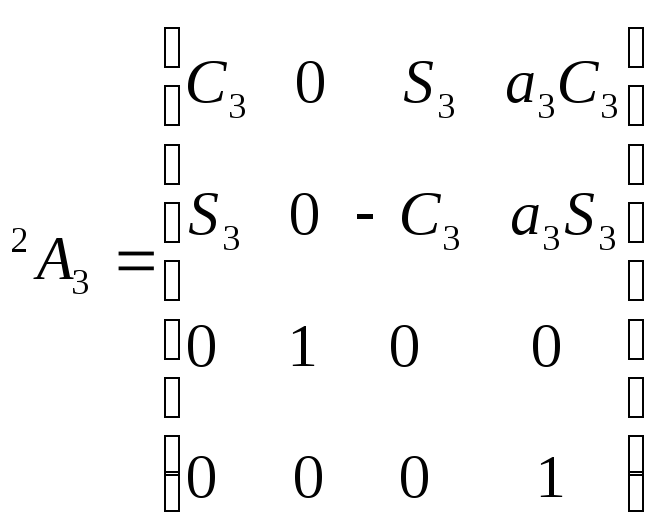
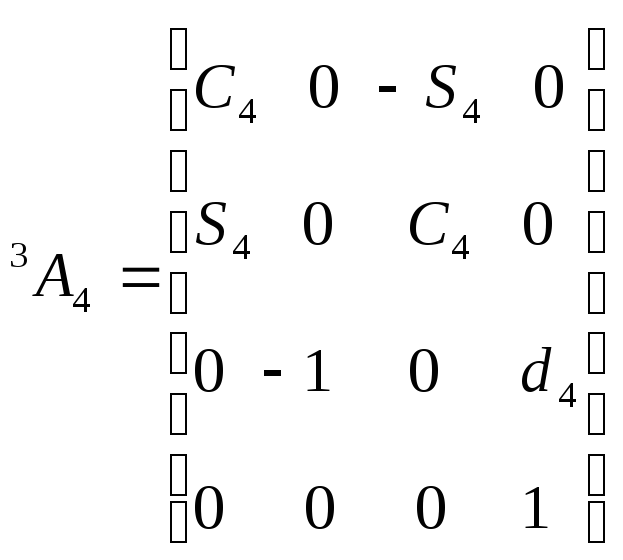
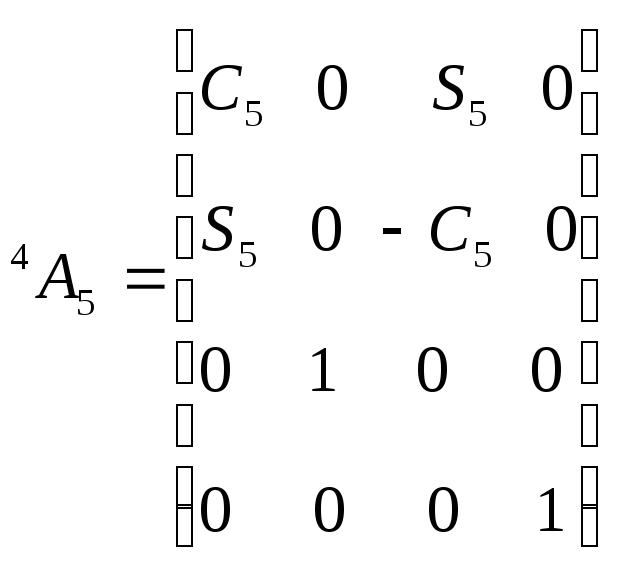
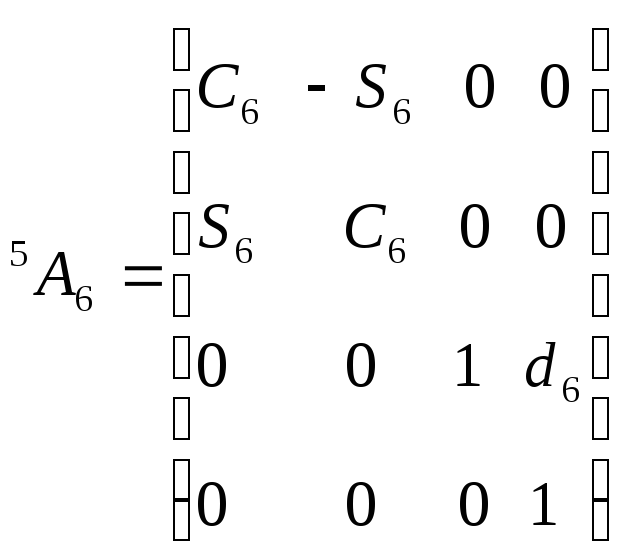
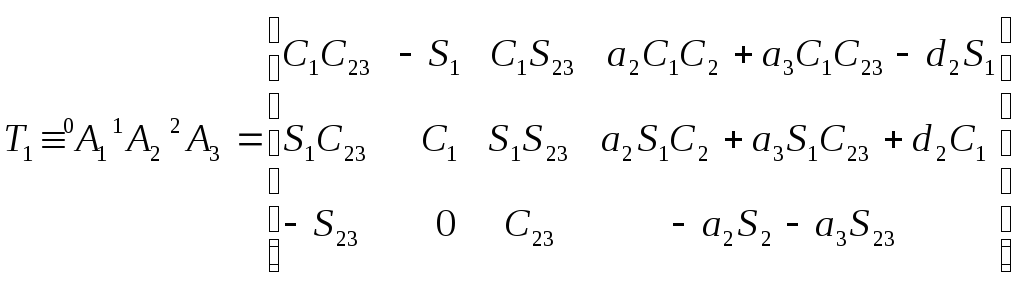
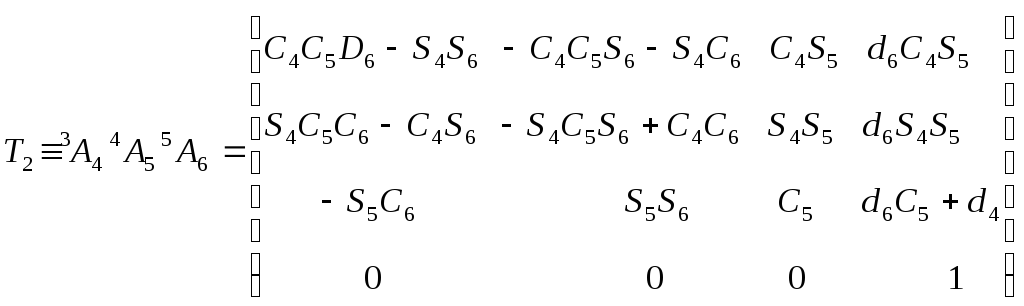
Для шестизвенного
манипулятора Пума были определены шесть
матриц
![]() ,
соответствующие показанным на рис. 5.4.
системам координат. Эти матрицы
представлены ниже:
,
соответствующие показанным на рис. 5.4.
системам координат. Эти матрицы
представлены ниже:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
где
![]() ;
;
![]() ;
;![]() ;
;![]() .
.