

Васильев К.К. Теория автоматического управления (следяшие системы)
.pdffm для реальных процессов не удается. Вторая проблема – слишком высокая частота временного квантования, которая получается при использовании теоремы Котельникова. Поэтому при проектировании систем управления обычно производят расчеты дополнительных погрешностей системы, вызванных временной дискретизацией. Интервал квантования Ткв при этом выбирается исходя из заданной величины погрешности за счет временного квантования.
* * *
Итак, в современных цифровых сиcтемах управления обычно выбирается достаточно малый интервал амплитудного квантования. При этом дополнительные погрешности системы, вызванные амплитудной дискретизацией, оказываются малыми. Во многих случаях ими пренебрегают. Вместе с тем выбор интервала временного квантования в соответствии с теоремой Котельникова часто приводит к неоправданному повышению тактовой частоты вычислительной машины. Поэтому для анализа систем управления, работающих в дискретном времени, применяют специальные методы анализа, которые мы рассмотрим на следующих занятиях.
4.2. ЦИФРОВЫЕ ФИЛЬТРЫ
Как мы уже знаем, основные операции, которые выполняет ЦВМ в контуре управления, связаны с реализацией цифровых фильтров. На этой лекции вначале мы установим связь между уже известными нам аналоговыми фильтрами и соответствующими цифровыми фильтрами. Затем познакомимся с основными методами и алгоритмами цифровой фильтрации сигналов. Рассматриваемые методы важны не только для систем управления. Они применяются в самых различных системах обработки сигналов, например, в системах цифровой связи.
Связь аналоговых и цифровых фильтров
Любой линейный аналоговый фильтр с передаточной функцией H(p) описывается дифференциальным уравнением следующего общего вида:
81

d n x(t) |
+ a |
d n−1x(t) |
+...a |
|
x(t) = b |
d m g(t) |
+... +b g(t). |
dtn |
|
|
|
||||
1 dtn−1 |
|
n |
0 dtm |
m |
|||
Предположим, что входные и выходные сигналы этого фильтра наблюдаются в дискретные моменты времени ti = iTкв . При малых интервалах временного квантования Ткв можно приближенно заменить производную первого порядка на отношение разностей:
dx ~ |
x(ti ) − x(ti −Tкв ) |
+ (xi − xi−1 ) = |
x(ti ) − x(ti−1 ) |
|
xi − xi−1 |
|
∆xi |
. |
||
|
= |
|
|
= |
|
= |
|
|||
dt |
Tкв |
Tкв |
Ткв |
Ткв |
||||||
|
|
|
|
|
||||||
Соответственно вторая производная может быть приближенно записана в виде
|
|
d2x ~ |
∆x i − ∆x i−1 |
|
|
1 |
(x i − x i−1 − x i−1 + x i−2) |
|
|
1 |
(x i −2x i−1 |
+ x i−2) = |
∆2x i |
. |
|||||||
|
|
|
|
|
= |
|
= |
|
|
= |
|
|
Ткв2 |
||||||||
|
|
|
dt2 |
|
Ткв2 |
|
|
||||||||||||||
|
|
|
|
Ткв2 |
|
|
|
|
|
Ткв2 |
|
|
|
||||||||
Третья производная |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
d3x |
|
~ ∆2x i − ∆2x i −1 |
|
|
x i −2x i−1 − x i−1 +2x i−2 − x i−3 |
|
|
|
x i −3x i−1 +3x i−2 − x i−3 |
|
∆3x i−1 |
|||||||||
|
dt3 |
= |
|
Ткв2 |
= |
|
|
|
|
Ткв2 |
= |
|
|
Ткв2 |
|
= |
Ткв2 |
||||
.
Продолжая этот процесс замены производных конечными разностями, получим
d nx |
~ |
|
1 |
(x i + c1x i−1 |
+ c2x i−2 +...+cn−1x i−n) . |
dt n |
= |
Тквn |
|||
|
|
|
|||
Подставим теперь все выражения для производных в дифференциальное уравнение аналогового фильтра. Получим следующее
выражение |
для |
эквивалентного |
цифрового |
фильтра: |
xi =α1xi−1 + d2 xi−2 +... +αn xi−n + β0 gi + β1gi−1 +... + βm gi−m . |
|
|||
Таким образом, мы нашли цифровой эквивалент аналогового фильтра; все операции цифровой фильтрации могут выполняться теперь на ЭВМ.
Пример 1. Пусть имеется апериодическое звено с переда-
точной функцией H ( p) = |
|
|
k |
. Выходной сигнал этого звена |
|
1 |
+ pT |
||||
|
|
||||
x(p) = H(p) g(p) или x(p) (1+pT) = kg(p). Во временной области функционирование звена описывается соответствующим дифференциальным уравнением: T dxd(tt) + x(t) = kg(t) .
82

Найдем эквивалентный этому звену цифровой фильтр. Для
этого заменим |
dx(t) / dt = (xi − xi−1 ) / Ткв |
и |
тогда |
|
~ |
|
|
ТТкв (xi − xi−1 ) + xi = kgi .
После элементарных преобразований получим:
|
x i = |
|
|
1 |
|
|
x i−1 + |
|
k |
gi |
или |
xi =α1 xi−1 + β0 gi , |
||
|
1 |
|
|
|
1+T / Tкв |
|||||||||
|
|
|
+Т / Tкв |
|
|
|
||||||||
где |
|
|
1 |
|
|
|
|
k |
|
|
|
|||
α1 = |
|
, |
|
β0 = |
|
. |
|
|
||||||
1+ T / Tкв |
|
|
|
|||||||||||
|
1+T /T |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
ђ‰ |
|
|
|
|
|
Анализ общего выражения для цифрового фильтра показыва- |
|||||||||||||
ет, что фильтр состоит из двух частей. |
Первая часть, соответст- |
|||||||||||||
вующая случаю β1 = β2 |
=...βm = 0, |
записывается в виде |
||||||||||||
|
|
|
|
|
xi |
=α1 xi−1 +α2 xi−2 +...+αn xi−n + β0 gi . |
||||||||
|
Вычисление каждого следующего значения xi выходного |
|||||||||||||
сигнала фильтра осуществляется с |
помощью взвешивания преды- |
|||||||||||||
дущих выходных значений фильтра x i−1,... x i−n и одного входного значения gi. Такой фильтр называется рекурсивным фильтром n-
го порядка. Если же α1 = α2 =...= αn = 0 , то
xi = β0gi +β1gi−1 +...+βmgi−m .
В этом случае для фильтрации используется только текущее gi и предыдущие значения входного сигнала, взвешиваемые с коэффициентами β0 ,...βm . Такой фильтр называется нерекурсивным,
или фильтром скользящего окна.
Математическое описание цифровых систем
Пусть процесс с дискретным временем gi поступает на вход цифрового фильтра. На выходе будет уже другой процесс xi . Как можно описать характеристики процесса gi , и как они изменятся после прохождения через цифровой фильтр?
Для процессов с непрерывным временем подобная проблема решается на основе преобразования Лапласа или преобразования Фурье. Действительно, если известен спектр непрерывного входно-
|
∞ |
|
го процесса |
g( jω) = ∫g(t)e− jωt dt , |
то спектр выходного сигнала |
|
−∞ |
|
G(jω) = H(jω) g(jω) , где H(jω) – |
передаточная функция фильтра. |
|
83
Для процессов с дискретным временем существуют точно такие же по смыслу соотношения. Для них вводится дискретное преобразование Фурье:
∞ |
или g( jω) = Ф{gi}. |
g( jω) = ∑gνe− jωvT |
|
v=0 |
|
Отметим следующие два важных свойства дискретного преобразования Фурье:
1) линейность Ф{agi +bvi}= aФ{gi}+bФ{vi};
2) Ф{gi−m}=Ф{gi}e− jωTm .
Применение этих свойств позволяет легко находить спектр процесса на выходе цифрового фильтра.
Пример 2. Пусть цифровой фильтр описывается следующим выражением: xi =α1 xi−1 +d2 xi−2 + βgi . Преобразуем по Фурье левую и правую часть этого выражения:
x( jω) =α1e− jωT x( jω) +α2 e−2 jωT x( jω) + βg( jω) .
Тогда |
x( jω) = H ( jω)g( jω) , где H ( jω) = |
|
β |
|
|
|
– |
||
|
|
|
|
||||||
1−α e− jωT −α |
e−2 jωT |
||||||||
передаточная функция цифрового фильтра. |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Так же, |
как и в системах с непрерывным временем, |
|
H( jω) |
|
|
||||
|
|
||||||||
называется амплитудно-частотной характеристикой цифрового фильтра, а Arg H(jω) – фазочастотной характеристикой. Если H(jω)
– передаточная функция замкнутой цифровой системы управления,
то полюсы р1 ир2 (нули знаменателя) H(p) = |
|
β |
|
долж- |
|
|
|||
1−α e−pTкв −α |
e−2pTкв |
|||
|
1 |
2 |
|
|
ны лежать в левой полуплоскости комплексного переменного. Вместе с тем, появляется очевидное неудобство использова-
ния дискретного преобразования Фурье: передаточные функции содержат экспоненты в знаменателе и числителе. Поэтому было предложено в дискретном преобразовании Фурье ввести новую переменную e jωTкв = z . Тогда дискретное преобразование Фурье
∞
g( jω) = ∑gie−jωiTкв превращается в так называемое Z–преобразование:
i=0
∞
g(z) = ∑gi z−i . Обычно записывают g(z) = Z{gi }.
i=0
Z – преобразование имеет ряд свойств, аналогичных дискретному преобразованию Фурье. Отметим линейность Z – преобразования и Z {gi − m} = Z {gi}z −m .
84
Пример 3. Рассмотрим цифровой фильтр, описываемый
уравнением: |
xi =α1xi−1 +α2xi−2 + β0 gi + β1gi−1. Применим |
Z– |
|||||||
преобразование |
к |
правой |
и |
левой |
части. |
Тогда |
|||
x(z) =α1 z −1 x(z) +α2 z −2 x(z) + β0 g(z) + β1 z −1 g(z) , т.е. |
x(z) = H (z)g(z) , |
где |
|||||||
|
β0 + β1z |
|
|
|
|
|
|
|
|
H (z) = |
|
. |
Для нахождения амплитудно-частотной харак- |
||||||
1−α1z−1 −α2 z−2 |
|||||||||
теристики фильтра |
можно |
подставить |
z = e jωT |
и найти |
|||||
H (w) = H (z = e jωT ) .
Таким образом, с помощью Z–преобразования легко получить передаточную функцию любого линейного цифрового фильтра.
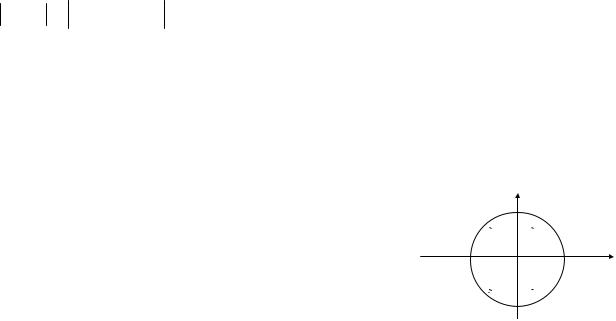
Устойчивость систем управления принято проверять с помощью анализа передаточной функции H(z). Если z = e jωTкв = epTкв, то в том случае, когда корень p = a + jb находится в левой полуплоско-
сти комплексного переменного, т.е. когда |
Ym |
|
|
|||||
система |
устойчива, |
|
|
|
то |
z2 |
z1 |
|
z = e(a+ jβ)Tкв |
= eaTкв e jβTкв , и если a < 0 , то |
|
z |
|
<1. |
|
||
|
|
|
||||||
Таким образом, условие устойчивости мож- |
z3 |
z4 |
Rl |
|||||
но сформулировать следующим образом. |
|
|
|
|||||
Цифровая система управления или цифро- |
|
|
|
|||||
вой фильтр устойчив, если все корни знаме- |
Рис. 49 |
|
||||||
нателя передаточной функции H(z) находится внутри единичного круга на плоскости комплексного переменного (рис. 49).
* * *
Полученные результаты позволяют реализовать процесс фильтрации в виде программы для специализированной или универсальной ЭВМ. Как мы видели, существует приближенный способ построения цифрового фильтра, основанный на аналоговом прототипе. Точный способ заключается в подборе подходящих коэффициентов α1,...,αn , β0 ,β1,...,βm цифрового фильтра. Более под-
робные сведения о цифровой фильтрации можно найти в книгах
[16–18].
85

4.3. ДЕЙСТВИЕ ПОМЕХ НА ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Рассмотрим особенности анализа цифровых систем управления, находящихся под воздействием помех. Вначале приведем основные формулы, позволяющие определить дисперсию ошибки сопровождения, обусловленную действием помех. Затем кратко проанализируем методы построения оптимальных линейных дискретных систем, которые в настоящее время широко используются при проектировании и анализе цифровых систем управления.
Дисперсия ошибки в цифровых системах управления
Цифровую систему управления с учетом действия помех можно представить в виде рис. 50.
|
ni |
|
|
|
|
На вход системы действует сумма |
|
|
|
|
|
|
zi управляющего воздействия |
~ |
|
gi |
|
zi |
|
xi |
gi = g(ti ) и |
||
|
САУ |
помех Ni = N(ti). В результате действия |
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
помехи в выходном сигнале xi содер- |
|
|
|
|
|
|
|
||
|
|
|
|
Рис. 50 |
|
жится случайная составляющая, которую |
|
|
|
|
|
|
можно охарактеризовать |
величиной |
|
|
|
|
|
|
|
||
дисперсии σ x2 . При этом цифровая система управления описывается разностным уравнением:
xi =α1xi−1 +... +αn xi−n + β0zi +... + β1zi−1 +... + βm zi−m .
Поскольку система управления линейна, то можно отдельно рассматривать прохождение сигналов и помех через эту систему. Таким образом, достаточно найти дисперсию процесса, описываемого следующим уравнением общего вида:
xi =α1 xi−1 +... +αn xi−n + β0 Ni + β1 Ni−1 +... + βm Ni−m .
Помехой в системе управления обычно служат независимые отсчеты Ni гауссовских случайных величин с нулевым средним и дисперсией σn2 . В общем случае дисперсия результирующего
процесса xi находится с помощью известных методов теории вероятностей. Действительно, разностное уравнение представляет собой закон преобразования случайных величин {Ni } в случайные вели-
чины {xi }. Поэтому любые вероятностные характеристики выражаются через известные характеристики помех.
86

Пример. Система первого порядка.
Пусть система управления описывается простейшим разностным уравнением вида xi =α1xi−1 + β0 Ni .
Найдем дисперсию ошибки на выходе такой системы. Для этого возведем левую и правую части в квадрат и найдем матема-
тическое |
ожидание. |
После |
|
возведения в квадрат получаем |
|||
xi2 =α12 xi2−1 + 2α1β0 xi−1 Ni + β02 Ni2 . |
|
|
|||||
|
Теперь находим математическое ожидание левой и правой |
||||||
частей:σ x2 =α12σ x2 + β02σn2 . |
|
|
|||||
|
Таким образом, дисперсия ошибки за счет действия помех |
||||||
σ 2 = |
β02 |
σ 2 . Заметим, |
что |
|
α1 |
|
<1, т.к. в противном случае система |
|
|
||||||
x |
1 −α12 |
n |
|
|
|
|
|
|
|
|
|
|
|||
управления будет неустойчивой.
Оптимальные цифровые системы Описания динамики движения объектов в цифровых сис-
темах
В непрерывных системах для описания динамики движения объекта или входного сигнала системы управления используется следующее стохастическое дифференциальное уравнение:
dgd(tt) + ag(t) =ξ(t), где ξ(t) – белый шум. В этом случае траектория движения объекта представляет собой одну из множества реализа-
ций случайного процесса g(t) . |
|
В цифровых системах дифференциальному уравнению пер- |
|
вого порядка |
будет соответствовать разностное уравнение |
gi =νgi−1 +ξi , где ν |
– постоянный коэффициент; ξi – гауссовские не- |
зависимые случайные величины с дисперсией σξ2 . Определим веро-
ятностные характеристики возможных траекторий объекта в дискретном времени. Так же, как и в рассмотренном примере, возведем левую и правую части уравнения движения объекта в квадрат и
найдем |
математическое ожидание. |
Получим σg2 =νσg2 +σξ2 или |
||
σg2 = |
σξ2 |
. Эта величина дисперсии |
σ2g определяет динамический |
|
1 −ν |
||||
|
|
|
||
диапазон возможных отклонений траектории от среднего значения. 87

Другим параметром, описывающим движение объекта, является характеристика скорости изменения траектории. В рассматриваемом случае мерой этой скорости может быть коэффициент корреляции двух соседних значений g(ti–1) =gi–1 и g(ti) = gi траектории. Для его нахождения умножим левую и правую части уравне-
ния на |
gi–1 |
и |
найдем их средние значения: |
||||||
M{gi gi−1}=νM {gi2−1 }+ M{ξi gi−1}. |
Поскольку M{ξigi−1}= 0, то коэффици- |
||||||||
ент корреляции |
|
M{gi gi−1} |
=ν . |
Таким образом, параметр |
|
ν |
|
<1 ока- |
|
|
|
|
|||||||
|
M {gi2−1} |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
зывается равным значению коэффициента корреляции двух соседних значений траектории.
Нормированная корреляционная функция последовательности {gi} описывается при этом простым выражением R(m) =ν|m| .
Допустим, что с помощью приведенного уравнения мы хотим описать траекторию движения объекта, значительно изменяющегося за 100 тактовых интервалов. Это означает, что R(100) = ν100 = 0,5 . В этом случае можно выбрать ν =100 0,5 0,993.
Оптимальная цифровая линейная система управления
Пусть на вход линейной системы управления действует сумма zi =gi + ni управляющего сигнала gi , который описывается уравнением gi = vgi−1 +ξi и помехи ni в виде независимых
отсчетов мешающего процесса с дисперсией σn2 .
Состояние цифровой линейной системы управления xi связано с входным сигналом следующим разностным уравнением
xi =αi xi−1 + βi zi .
Основной задачей системы является минимизация дисперсии ошибки εi = xi − gi управления. Рассмотрим возможности построе-
ния оптимальной системы, для которой дисперсия ошибки минимальна. Для минимизации дисперсии имеется возможность выбора
коэффициентов αi и βi системы управления. |
|
|
|
|||
Итак, необходимо найти min M (ξ |
)2 |
} |
= min M{(x |
i |
− g |
)2 }. Подставим |
{ i |
|
|
i |
|
||
в формулу для ошибки известные соотношения: |
|
|
|
|||
εi =αi xi−1 + βi (gi + ni ) −gi =αi xi−1 + (β −1)(νgi−1 |
+εi ) + βi ni = |
|||||
(αi +ν(βi −1)gi−1 +αiεi−1 + (βi −1)εi + βi ni . |
|
|
|
|||
88
Величины gi–1 имеют большие значения. Если необходимо минимизировать ошибки, то нужно положить α + ν(βi −1) = 0. Тогда
εi = αi εi−1 + (βi −1)εi + βi ni или εi = ν(1 − βi )εi−1 + (βi −1)εi + βi ni .
В этой формуле отражены три составляющие ошибки системы управления. Первое слагаемое учитывает ошибку εi−1 = xi−1 − gi−1 на предыдущем шаге работы системы. Второе слагаемое – динамическая ошибка за счет изменения траектории движения. Третье слагаемое βi ni – ошибка, вызванная действием помех на систему
управления. Поскольку все слагаемые являются независимыми, то дисперсия будет равна сумме дисперсий ошибок всех трех слагаемых:
|
|
Di = M{εi2}, |
Di = ν2 (1 −βi )2 Di−1 + (βi −1)2 σ2ξ + β2i σ2n |
, |
|
|
|
|
||||
где |
σ2ξ = M{εi2}, σ2n = M{ni2 }. |
|
|
|
|
|
|
|
||||
|
|
Продифференцируем Di |
по βi и приравняем производную к |
|||||||||
нулю. Легко подсчитать, что минимальное значение Pi |
= Di |
min |
||||||||||
дисперсии ошибки достигается |
при β |
i |
=(σ 2 )−1 P |
/(1 + (σ 2 )−1 P |
), |
|
где |
|||||
|
|
|
|
|
|
n эi |
n |
эi |
β |
|
|
|
P |
=ν 2 P |
+σ 2 . |
После подстановки оптимального значения |
i |
в |
|||||||
эi |
|
i−1 |
ξ |
|
|
|
|
|
|
|
|
|
уравнение системы получаем следующий алгоритм функционирования оптимальной цифровой системы управления:
x |
i |
= x |
эi |
+ P |
1 |
(Z |
i |
− x |
эi |
), |
P = P |
/(1+ |
1 |
P |
) , |
P |
=V 2 P |
+σ 2 |
, |
|
|
|
|
||||||||||||||||||
|
|
i σ 2 |
|
|
|
i эi |
|
σ 2 эi |
|
эi |
i−1 |
ξ |
|
|||||||
где xэi |
=νxi−1 . |
n |
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В этом уравнении величина xэi является экстраполированной
на один шаг траекторией объекта или прогнозом значения траектории. Действительно, на предыдущем шаге состояние системы было xi−1 . Динамика изменения траектории описывается уравнением
gi = νgi−1 + ξi . Лучшее, что мы можем сделать с точки зрения про-
гноза траектории движения gi – предсказать, что сигнал gi будет иметь величину хэi =νxi−1 .
Таким образом, в найденной системе управления вначале формируется прогноз x эi траектории движения. Затем определяется рассогласование zi − x эi между сделанным прогнозом и очередным сигналом управления zi , искаженном помехами. После этого очередное состояние системы x i формируется как сумма прогноза x эi и взвешенного рассогласования.
89
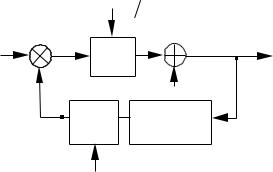
zi |
+ |
pi |
σ2n |
|
+ |
||
|
Х |
|
|
|
– |
|
+ |
xэi |
|
|
|
|
|
Х |
Задержка |
||
|
|
на такт |
||
νxi−1
Рис. 51
xi |
|
|
Весовым коэффициентом |
|
рi /σ2n |
служит отношение диспер- |
|||
|
сии ошибки системы управления |
|||
|
рi |
и |
дисперсии помех, |
дейст- |
|
вующих на систему управления. |
|||
|
|
|
Структурная схема |
рас- |
|
смотренной оптимальной цифро- |
|||
|
вой |
системы управления |
может |
|
|
быть представлена в виде рис.51. |
|||
* * *
Рассмотренные вопросы действия помех на цифровые системы управления позволяют решить две важные задачи. Во–первых, для любой заданной линейной системы управления можно дать оценку ее эффективности, т.е. оценить дисперсию ошибки за счет действия помех. Вторая важная задача – построение оптимальной цифровой системы управления, учитывающей как динамику движения объекта, так и величину помехи, действующей на систему управления.
4.4. МНОГОМЕРНЫЕ И АДАПТИВНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Рассмотрим два вопроса, связанные с современными методами построения систем управления. Вначале проанализируем многомерный дискретный фильтр Калмана, который применяется при управлении системами по нескольким параметрам одновременно. Затем кратко рассмотрим адаптивные системы, которые предназначены для работы в условиях изменяющихся внешних воздействий.
Многомерный цифровой фильтр Калмана
Модели входных сигналов
В предыдущем разделе была рассмотрена модель движения объекта в виде скалярного разностного уравнения gi = vgξ −1 + ξi . При
90