

3 Работа c fea-проектами
3.1 Расчет плоских рам на статическую нагрузку.
3.1.1 Ввод исходных данных.
Рассмотрим порядок работы с конечно-элементными схемами в программе STARK ES. Для этого рассчитаем раму, представленную на рисунке 20. Жесткости горизонтальных и вертикальных элементов рамы соотносятся как 2 : 3.
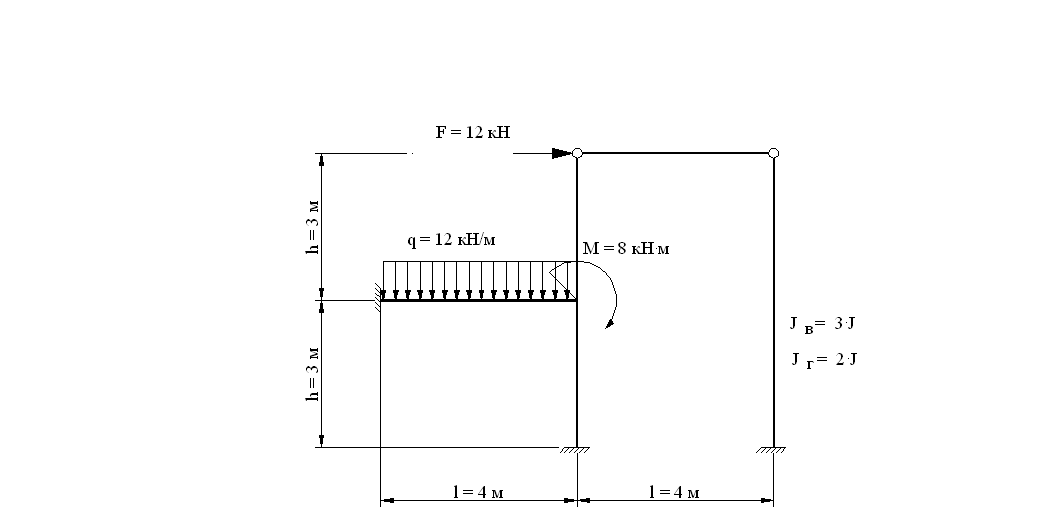
Рис20. Расчетная схема рамы.
В STARK ES предусмотрено несколько типов частичных проектов. Мы будем создавать расчетную схему данной рамы непосредственно в виде конечно-элементной модели.
Создаем новый
проект при помощи команд верхнего
меню → Проекты →Создать
или кнопки
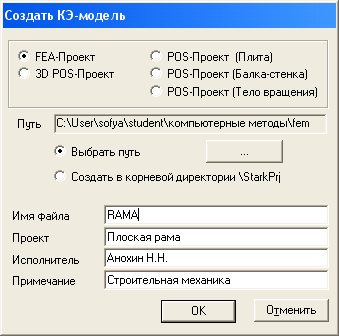
В этом окне выбираем опцию «FEA-Проект», задаем «Имя файла» (не более восьми символов без пробелов латинскими буквами)8 и заполняем поле «Проект». Затем нажимаем кнопку «ОК». |
|
В программе STARK ES рамы моделируются при помощи элементов типа 2D-стержень или 3D-стержень.
Дополнительная информация:
2D-стержни применяются при решении плоских задач (расчете плоских рам и ферм на нагрузки, действующие в их плоскости). Элементы данного типа описываются номерами начального и конечного узлов, площадью поперечного сечения A [м2], моментом инерции при изгибе It [м4], модулем упругости материала стержня E [кПа], сдвиговой площадью Aq [м2], модулем сдвига G [кПа] (G=E/(2*(1+)), где – коэффициент Пуассона) и плотностью материала стержня Rho [т/м3].
Площадь сдвига задается в случае, если необходимо учесть поперечные сдвиговые деформации. Чем меньше значение площади сдвига, тем влияние деформаций поперечного сдвига больше. Однако если величина площади сдвига будет указана равной нулю, то жесткость на сдвиг считается бесконечно большой, и сдвиговые деформации не учитываются.
При задании плотности автоматически определяется собственный вес системы и учитывается в нагружении № 1. Кроме того, по значениям плотности материала Rho и площади поперечного сечения A будут автоматически вычислены и приведены к узлам массы для их учета в динамическом расчете.
Нумерация узлов элемента определяет направление местной системы координат (r-s-t) элемента, с которой связаны характеристики сечений и результаты расчета. Начало местной системы координат располагается в первом узле элемента, и ось -r направлена от первого узла ко второму узлу элемента. Ось -s направлена так, чтобы при совмещении оси -r с глобальной осью X ось -s совпала с глобальной осью Y. Ось -t направлена таким образом, чтобы система координат (r-s-t) являлась правой.
3D-стержни применяются при решении пространственных задач (в том числе и для плоских рам и ферм, если не исключена их работа из плоскости). Элементы данного типа описываются номерами начального и конечного узлов, площадью поперечного сечения A [м2], сдвиговой площадью в направлении местной оси -s – As [м2], сдвиговой площадью в направлении местной оси -t – At [м2], моментом инерции при изгибе Is [м4], моментом инерции при изгибе It [м4], моментом инерции при кручении Ir [м4], модулем упругости материала стержня E [кПа], модулем сдвига G [кПа] (G=E/(2*(1+)), где – коэффициент Пуассона) и плотностью материала стержня Rho [т/м3].
Площади сдвига задаются в случае, если необходимо учесть поперечные деформации. Чем меньше значение площади сдвига, тем влияние деформаций поперечного сдвига больше. Однако, если величина площади сдвига будет указана равной нулю, то жесткость на сдвиг считается бесконечно большой, и сдвиговые деформации не учитываются.
Модуль сдвига G всегда необходимо задавать отличным от нуля – это значение используется при вычислении жесткости стержня на кручение и на сдвиг.
При задании плотности автоматически определяется собственный вес системы и учитывается в нагружении № 1. Кроме того, по значениям плотности материала Rho и площади поперечного сечения A будут автоматически вычислены и приведены к узлам массы для их учета в динамическом расчете.
Характеристики сечений связаны с местной системой координат элемента (r-s-t). По умолчанию эта система координат определяется следующим образом. Начало местной системы координат располагается в первом узле элемента и ось –r направлена от первого узла ко второму узлу элемента. Оси -s и -t в зависимости от положения элемента в пространстве определяются по следующим правилам.
Случай 1:
Ось стержня параллельна глобальной XY-плоскости.
Ось -t направлена по глобальной оси Z.
Ось -s направлена таким образом, чтобы система координат (r-s-t) являлась правой.
Случай 2:
Ось стержня перпендикулярна к глобальной XY-плоскости.
Ось -s параллельна глобальной оси Y и направлена по этой оси. Ось -t определяется таким образом, чтобы система координат (r-s-t) являлась правой.
Случай 3:
Ось стержня ориентирована произвольным образом в пространстве.
Проецируем элемент на глобальную XY-плоскость. Для спроецированного стержня определяем местную систему координат (r-s-t) в соответствии со случаем 1. Затем вращаем эту систему координат вокруг оси -s до совмещения оси -r с осью исходного стержня. Результатом является искомая система координат (r-s-t). Вращение нужно осуществлять таким образом, чтобы в результате ось -t была направлена всегда в сторону положительной оси Z.
Отметим, что здесь описаны правила автоматического задания местной системы координат элемента. При помощи функций редактирования пользователь может определить произвольную местную систему координат элемента.
Для решения учебных примеров по строительной механике мы будет рассматривать плоскую задачу. При расчете реальных конструкций зданий и сооружений во избежание ряда ошибок рекомендуется решать задачи в пространственной постановке, т.е. использовать 3D-стержни с 6 степенями свободы в узле.