IV. Построение профиля кулачка
После определения минимального радиуса кулачка строится профиль кулачка. Построение профиля с различными типами толкателей (см. А.А.Машков ТММ 1971г., §8.2 стр. 169-183 и в примерах 1, 2, 3, 4 настоящего пособия.)
Пример 1. Выполнить кинематический анализ и динамический синтез центрального кулачкового механизма с роликовым толкателем по следующим данным: закон движения толкателя задан графиком V-S (рис.4), перемещение толкателя h = 35 нм, рабочий угол кулачка = 180, максимальный допустимый угол давления α = 30°, число оборотов кулачка n = 120 об/мин.
Решение:
1. Построение кинематических графиков.
Построение всех графиков изображено на рис.4 и выполнено методами,
описанными в случае 4 настоящего руководства.
2. Определение масштабных коэффициентов графиков.
а) Масштабный коэффициент перемещения
![]() =
h/
= 0,035/40 = 0,000875м/мм
=
h/
= 0,035/40 = 0,000875м/мм
где: h = 0,035 - заданное перемещение толкателя в метрах,
= 40 - максимальная ордината в мм на графике S-t
б) Масштабный коэффициент времени
 с/мм
с/мм
где: = 180 - заданный рабочий угол кулачка в градусах,
n = 120- заданное число оборотов в минуту кулачка.
- длина отрезка в мм на оси абцисс графика S-t рис.4, изображающая
время вращения кулачка на рабочий угол
в) Масштабный коэффициент скорости
 м/см
м/см
где: = 17 - полюсное расстояние в мм на графике V-S рис.4,
г) Масштабный коэффициент ускорения
 м/мм
м/мм
Принимаем
стандартный масштабный коэффициент
=
0,001 м/мм по обеим осям для построения
графика V-.
По оси ординат графика V-
в масштабе
![]() откладываем величину перемещения
толкателя = h/
= 35мм. (см. рис.7а). Разделим величину
перемещения толкателя на искомом
графике V-
откладываем величину перемещения
толкателя = h/
= 35мм. (см. рис.7а). Разделим величину
перемещения толкателя на искомом
графике V-![]() на столько равных частей, на сколько
разделена ось абсцисс (ось S)графика
V-S,
(рис.4). Если ось S
графика V-S
или S-t
окажется при построении разделенной
на неравные части, то и ординату графика
V-
следует разделить в пропорциональном
отношении, т.е. найти отрезки в масштабе
, изображающие перемещение толкателя
в каждом положении или аналитически:
на столько равных частей, на сколько
разделена ось абсцисс (ось S)графика
V-S,
(рис.4). Если ось S
графика V-S
или S-t
окажется при построении разделенной
на неравные части, то и ординату графика
V-
следует разделить в пропорциональном
отношении, т.е. найти отрезки в масштабе
, изображающие перемещение толкателя
в каждом положении или аналитически:
![]() (точки: 0, 1, 2, 3, 4 на графике V-S
рис.7а)
(точки: 0, 1, 2, 3, 4 на графике V-S
рис.7а)
или графически (см. А.А.Машков ТММ, 1971г., стр.172)
Определяем
угловую скорость кулачка:
![]() 1/с и т.д.
1/с и т.д.
Определяем в каждом положении толкателя в масштабе отрезки в мм приведенной скорости:
![]() ;
;
![]() ;
;
![]() ;
;
где:
![]() и
т.д. - ординаты скорости толкателя в мм
на графике V-1
или V-S(рис.
4)
и
т.д. - ординаты скорости толкателя в мм
на графике V-1
или V-S(рис.
4)
- масштабный коэффициент графика V-S или V-t.
Отрезки приведенной скорости толкателя можно определить также графически, для чего находим
 мм
мм
Где - максимальная ордината скорости на графике V-S или V-t.
Для остальных положений отрезки приведенной скорости определяются графически, как показано на рис.7б, где изображен (чтобы не затемнять рис.4) отдельно график V-S в его масштабах из рис.4
Через
начало координат графика V-S
под произвольным углом к оси V
графика проводим прямую АВ и на этой
пряной от начала координат, т.е. от точки
0, отложим отрезок максимальной
приведенной скорости 0α=![]() =29.
=29.
Затем на ось V графика V-S переносим ординату максимальной скорости
= 0- и ординаты скоростей в конце каждого участка
=
0,
=
0-1,
![]() =
=
![]() =
0-, =
0-3 .....
=
0-, =
0-3 .....
![]() =
0. Соединим
конец
=
0. Соединим
конец
ординаты
максимальной скорости с концом ординаты
на максимальной приведенной скорости
на линии АВ, т.е. точку
соединяем
с точкой а. Параллельно отрезку а-
проводим
прямые через точки
![]() и.т.д., которые на прямой АВ отсекут
отрезки приведенных скоростей толкателя
0-0, 0-1, 0-2, 0-3, 0-4, 0-5, 0-6, 0-7, 0-8 в принятом
масштабе в положениях 0, 1, 2, 3 ... 8.
и.т.д., которые на прямой АВ отсекут
отрезки приведенных скоростей толкателя
0-0, 0-1, 0-2, 0-3, 0-4, 0-5, 0-6, 0-7, 0-8 в принятом
масштабе в положениях 0, 1, 2, 3 ... 8.
Теперь отрезки 0-0, 0-1, 0-2,....0-8 из графика V-S переносим на график V-S и откладываем от оси по обе стороны в точках 0, 1, 2, 3, 4 ... 8 соответственно.
Концы
этих отрезков (точки:
![]() )
рис.7а соединяем плавной кривой и получаем
график V-.
Проводим под заданным углом давления
α=30° к обеим ветвям полученного графика
V-
касательные и находим минимальный
радиус центрового профиля кулачка
)
рис.7а соединяем плавной кривой и получаем
график V-.
Проводим под заданным углом давления
α=30° к обеим ветвям полученного графика
V-
касательные и находим минимальный
радиус центрового профиля кулачка
![]() .
Отрезок 0,0 и будет представлять собой
в масштабе
минимальный
радиус . Определяем истинную величину
минимального радиуса:
.
Отрезок 0,0 и будет представлять собой
в масштабе
минимальный
радиус . Определяем истинную величину
минимального радиуса:
= 0,0* = 36*0,001 = 0,036м = 36мм
Если
при построении графиков ось t
графика S-t
получилась разбитой на неравные части,
то ее следует разбить на некоторое
количество равных частей, что на рис.4
показано штриховыми линиями и в каждом
новом положении определяем перемещение
толкателя в масштабе
или аналитически
![]() или графически см. рис.4.
или графически см. рис.4.
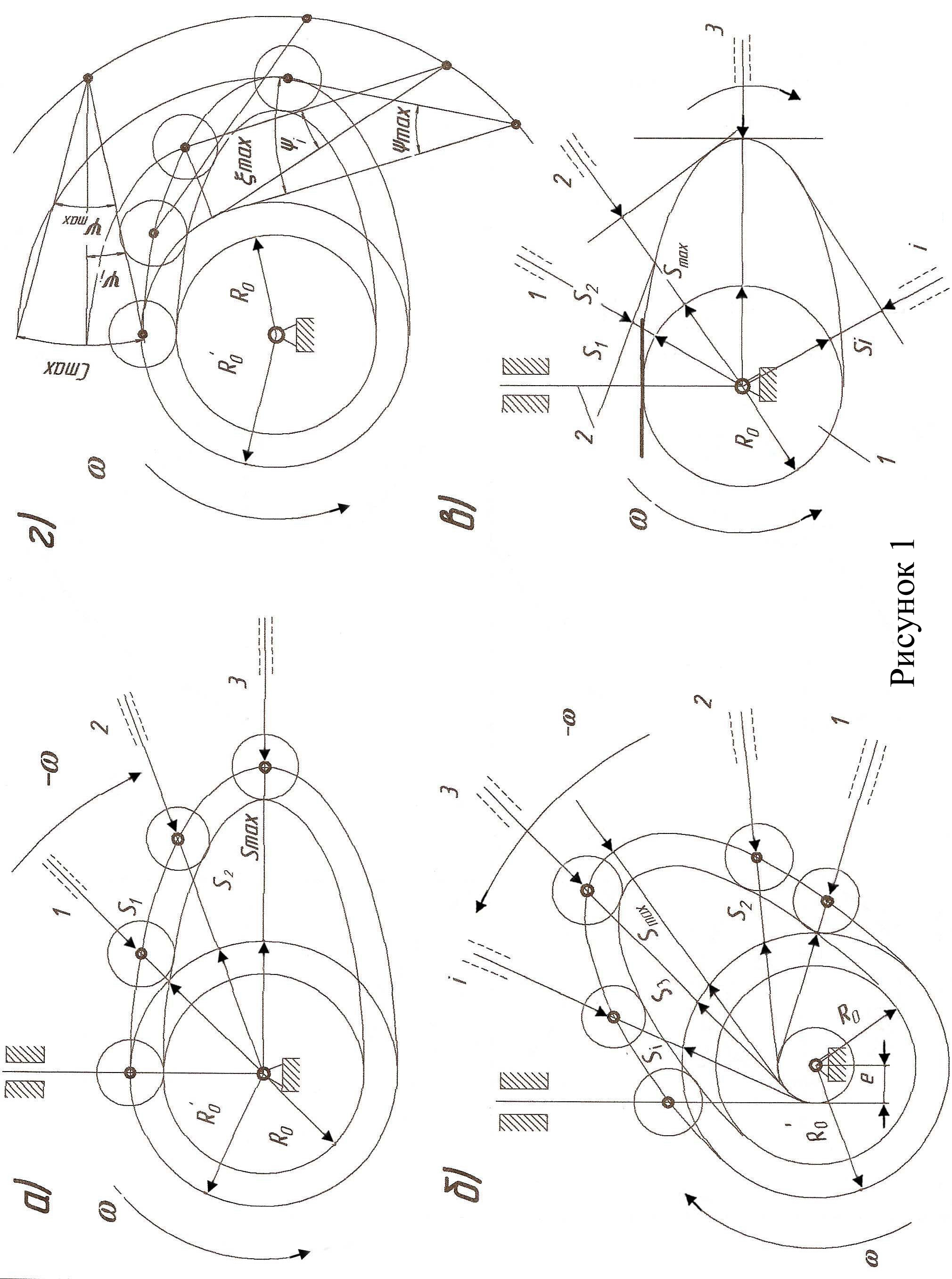
Теперь радиусом в масштабе строим окружность минимального радиуса центрального профиля кулачка (рис.7в) и от точки "О" в обращенном движении отгладываем рабочий угол = 180°, дугу которого делим на столько частей (на 8), на сколько разделена ось t графика S-t (рис.4).
Из
центра окружности 0, (рис.7в) через точки
деления 1, 2, 3, 4 .... 8 проводим радиусы-векторы,
на которых откладываем от окружности
минимального радиуса значения перемещения
толкателя найденные в масштабе т.е.
![]() .
.
Соединив концы этих отрезков плавной кривой, получим центровой профиль кулачка (см. рис.7в).
Выбираем
радиус ролика r
= (0,2![]() 0,4)
= 0,35*36 = 12,5мм. Методом обкатки центрового
профиля радиуса r
строим действительный профиль кулачка
и изображаем тип толкателя.
0,4)
= 0,35*36 = 12,5мм. Методом обкатки центрового
профиля радиуса r
строим действительный профиль кулачка
и изображаем тип толкателя.
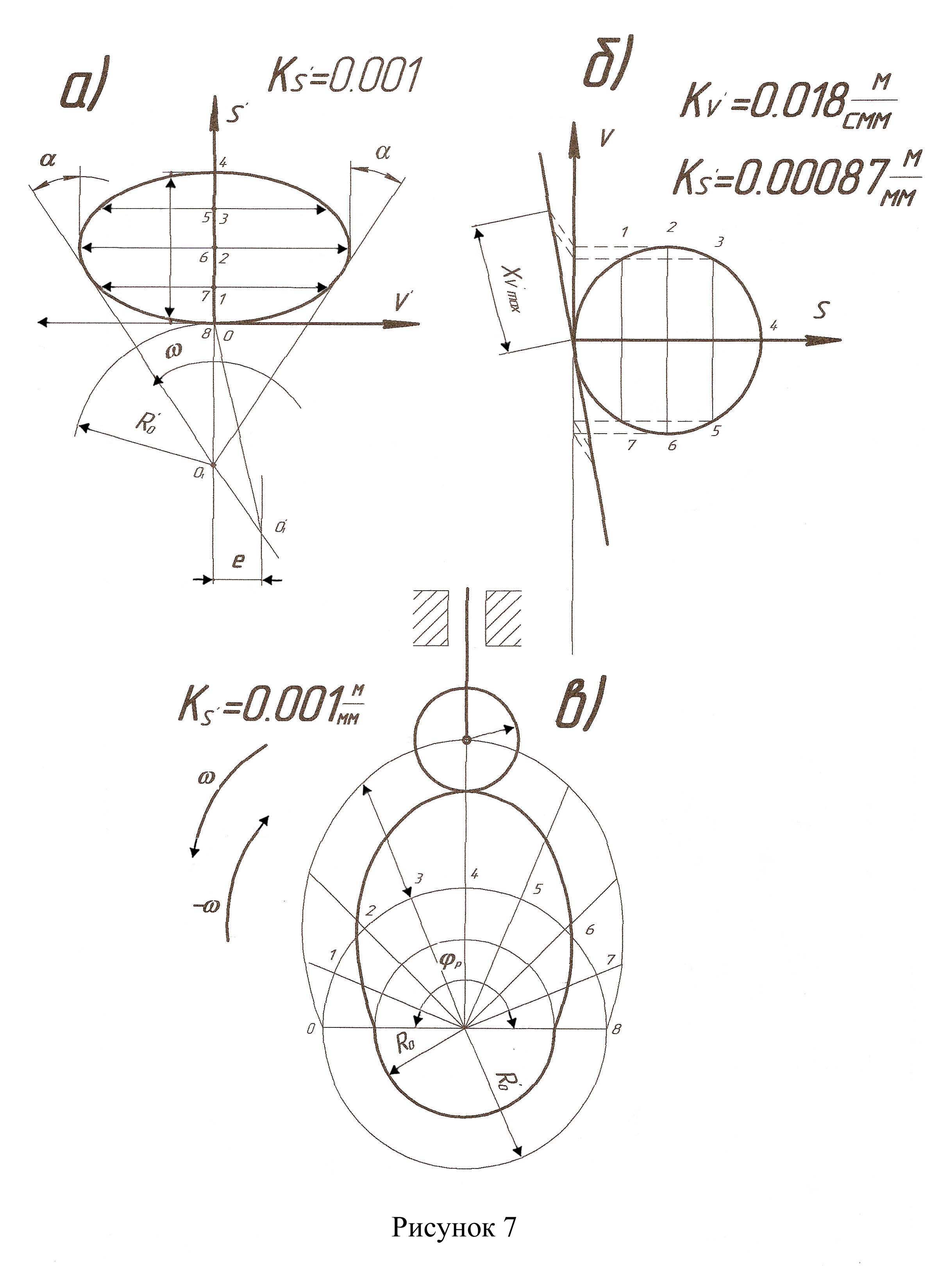
Пример 2. По исходным данным в примере 1 произвести анализ и синтез дезаксиального кулачкового механизма с роликовым толкателем, если величина дезаксиала е = 10мм.
Решение: Построение графиков описано в случае 4 и изображено на рис.4.
Определение масштабных коэффициентов графиков дано в решении примера.
1. Рассмотрим особенности определения минимального радиуса и построения профиля кулачка. Построение графика V- описано в решении примера 1.
Определение минимального радиуса кулачка
Определяем в масштабе величину дезаксиала:
![]() =e/=0,01/0,001=10.
=e/=0,01/0,001=10.
От оси O графика V- (рис.7б) откладываем в масштабе величину дезаксиала = 10мм в противоположную сторону выбранному направлению угловой скорости кулачка и через конец отрезка Xe проводим вертикальную линию. Расстояние от точки пересечения вертикали с касательной к графику до начала координат графика (O) и будет минимальным радиусом кулачка в выбранном масштабе т.е. = 0,0*
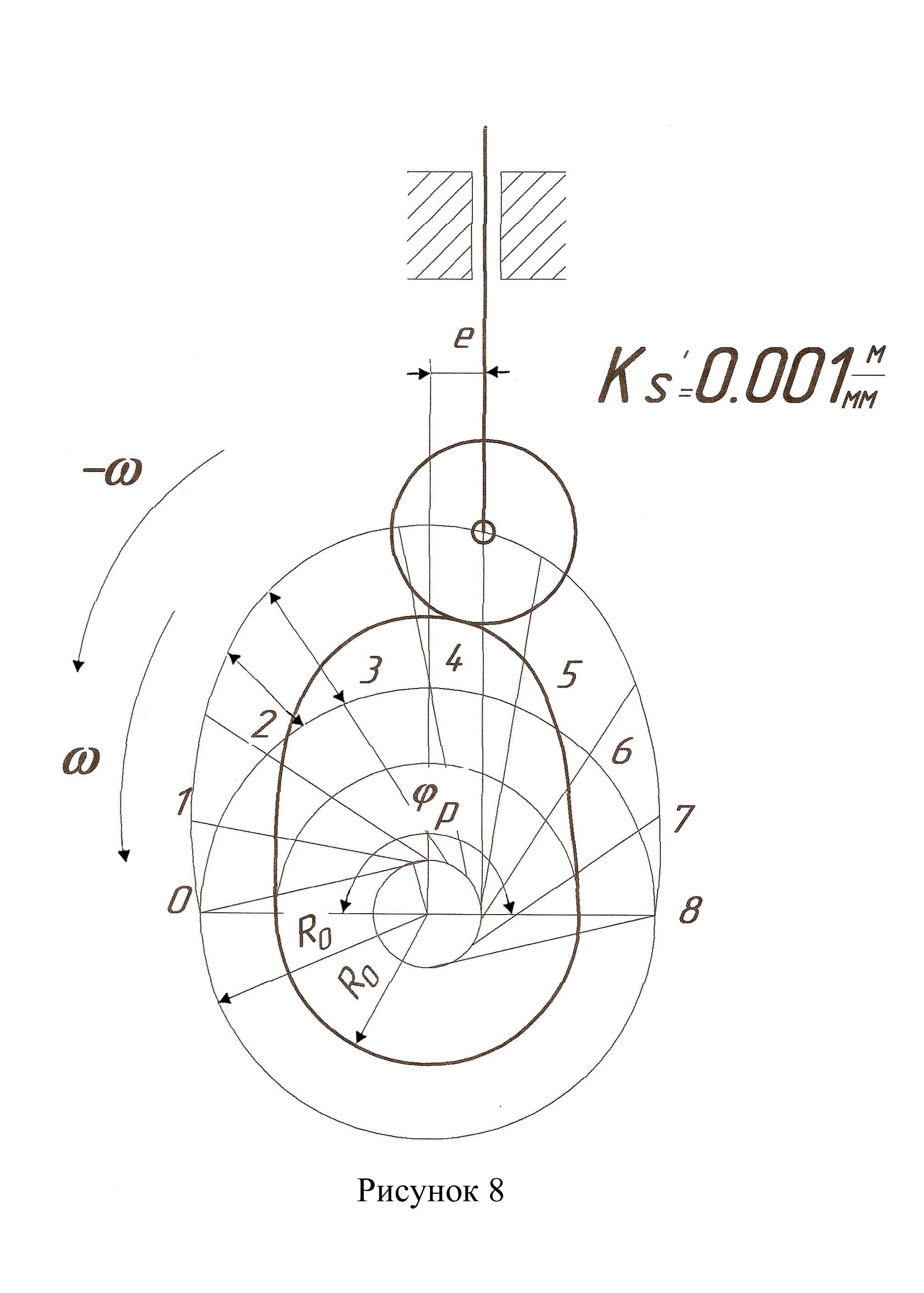
Построение профиля кулачка
Из
точки
![]() ,
(рис.8) в масштабе проводим две окружности:
окружность минимального радиуса
и окружность дезаксиала радиусом е. На
дуге окружности минимального радиуса
от точки "0" в обращенном движении
откладываем рабочий угол и делим его
на столько равных частей, на сколько
разделена ось t
графика
S-t
(рис.4). Через точки деления 0, 1, 2, 3 .... 8
проводим навстречу выбранному направлению
угловой скорости кулачка касательные
к окружности дезаксиала. На касательных
в каждом положении от окружности
минимального радиуса откладываем в
масштабе перемещения толкателя
,
(рис.8) в масштабе проводим две окружности:
окружность минимального радиуса
и окружность дезаксиала радиусом е. На
дуге окружности минимального радиуса
от точки "0" в обращенном движении
откладываем рабочий угол и делим его
на столько равных частей, на сколько
разделена ось t
графика
S-t
(рис.4). Через точки деления 0, 1, 2, 3 .... 8
проводим навстречу выбранному направлению
угловой скорости кулачка касательные
к окружности дезаксиала. На касательных
в каждом положении от окружности
минимального радиуса откладываем в
масштабе перемещения толкателя
![]() и т.д. Соединив концы этих отрезков
плавной кривой, получаем центровой
профиль кулачка. Выбираем радиус ролика
r
= (0,2
0,4)
и обкаткой вовнутрь центрового профиля
получаем действительный профиль кулачка.
Изображаем тип толкателя (см. рис.8).
и т.д. Соединив концы этих отрезков
плавной кривой, получаем центровой
профиль кулачка. Выбираем радиус ролика
r
= (0,2
0,4)
и обкаткой вовнутрь центрового профиля
получаем действительный профиль кулачка.
Изображаем тип толкателя (см. рис.8).
Пример 3. По исходным данным к примеру 1 произвести анализ и синтез кулачкового механизма с плоским толкателем.
Решение: Построение графиков описано в случае 4 и изображено на рис.4. Определение масштабных коэффициентов графиков рассмотрено в решении примера.
Определение минимального радиуса кулачка
Выбираем
масштабный коэффициент графика
приведенного ускорения в функции
перемещения - .
По оси ординат искомого графика
откладываем в масштабе
величину
перемещения толкателя = 35мм и делим его
на столько частей, на сколько разделена
ось S
графика O-S
на рис.4 аналитически:
![]() или графически (см.А.А.Машков, ТММ, 1971
г. стр.172.)
или графически (см.А.А.Машков, ТММ, 1971
г. стр.172.)
Определяем
в масштабе
отрезки приведенных ускорений в каждом
положении толкателя или аналитически:
![]() или графически X
или графически X![]() = Ya
*Ка/*
= 20*0,37*12,562*0,001
= 47мм.
= Ya
*Ка/*
= 20*0,37*12,562*0,001
= 47мм.
Графическое
определение приведенных ускорений в
масштабе показано на рас.9а, где изображен
отдельно график а-S
из рис.4. Теперь от оси в каждом положении
толкателя откладываем отрезки приведенных
ускорений
![]() и т.д. и соединив их концы кривой, получим
график а- (рис.90). К отрицательной части
графика, под углом 46° проводим касательную
до пересечения ее о осью O
в точке . Увеличим отрезок О
и т.д. и соединив их концы кривой, получим
график а- (рис.90). К отрицательной части
графика, под углом 46° проводим касательную
до пересечения ее о осью O
в точке . Увеличим отрезок О![]() на величину 10 мм в масштабе получим
точку .
на величину 10 мм в масштабе получим
точку .
Расстояние и будет представлять в масштабе величину минимального радиуса кулачка т.е. = * . Конструктивный радиус кулачка принимаем равным АО т.е. =АО* что допускается.
Примечание:
Если касательная к графику пересечет
ось выше начала координат графика a-,
то величину минимального радиуса кулачка
принимают не менее величины перемещения
толкателя, т.е.
![]() .
На окружности минимального радиуса в
обращенном движении (рис.8в) откладываем
рабочий угол и делим его на равные части
как и ось t
графика
S-t
(рис.4)
.Через точки 0, 1, 2 .... 8 из центра , проводим
лучи, на которых от окружности радиуса
откладываем перемещения
.
На окружности минимального радиуса в
обращенном движении (рис.8в) откладываем
рабочий угол и делим его на равные части
как и ось t
графика
S-t
(рис.4)
.Через точки 0, 1, 2 .... 8 из центра , проводим
лучи, на которых от окружности радиуса
откладываем перемещения
![]() ,….
и т.д., соответствующие данным положениям
толкателя (которые определены графически,
рис.4) получим точки
,….
и т.д., соответствующие данным положениям
толкателя (которые определены графически,
рис.4) получим точки
![]() .
Через эти точки проводом перпендикуляры
к лучам, т.е. положение тарелки толкателя
в обращенном движении. Действительным
профилем будет огибающая всех положений
тарелки, т.е. необходимо построить
плавную кривую, касающуюся перпендикуляров
в каждом положении.
.
Через эти точки проводом перпендикуляры
к лучам, т.е. положение тарелки толкателя
в обращенном движении. Действительным
профилем будет огибающая всех положений
тарелки, т.е. необходимо построить
плавную кривую, касающуюся перпендикуляров
в каждом положении.
Пример 4. Произвести анализ и синтез кулачкового механизма с роликовым колебателем, если дано:
1. Закон движения толкателя задан графиком ψ-t (рис.3)
2. Угол размаха колебателя ψ = 20°
3. Длина колебателя L = 75мм.
4. Рабочий угол кулачка = 150°.
5. Число оборотов кулачка n=125об/мин.
6. Угол давления α = 40°.
Решение:
1. Построение графиков приведено в случае 1.
2. Определение масштабных коэффициентов:
а) Масштабный коэффициент углового перемещения колебателя:
![]() 1/мм
1/мм
где: = 30 - ордината в мм на графике ψ-t.
б) Масштабный коэффициент времени:
 с/мм
с/мм
где: = 60мм - длина абсциссы, соответствующая времени поворота кулачка
на рабочий угол.
в) Масштабный коэффициент угловой скорости колебателя:
 1/см
1/см
где = 15 - полюсное расстояние в мм на графике ω-t
г) Масштабный коэффициент углового ускорения колебателя:
![]() [1/с2*мм]
[1/с2*мм]
3. Построение графика V-S и определение минимального радиуса. Принимаем масштабный коэффициент построения = 0,001 м/мм
Откладываем из точки А (рис. 10а) длину колебателя АВ в масштабе и строим угол размаха колебателя ψ. Определяем линейное перемещение конца колебателя (длину дуги) в этом же масштабе:
![]() мм
мм
Разбиваем
ось t
графика
ψ-t
на равные части и графическим построением
на графике -t
(см.рис.З) определяем линейные перемещения
конца колебателя соответствующее
положениям 0,1,2, 3 ... 6. Перемещения конца
колебателя 0-1, 1-2, 2-3 и. т.д. переносим на
дугу центрального угла
![]() размаха колебателя, и через эти точки
деления из центра А проводим лучи А-0,
А-1, А-2 и т.д. (рис. 10а).
размаха колебателя, и через эти точки
деления из центра А проводим лучи А-0,
А-1, А-2 и т.д. (рис. 10а).
Определяем приведенные скорости конца колебателя, соответствующие перемещениям колебателя в положениях 0, 1, 2 ... 6 или аналитически:
![]() ,
или графическим
построением, как показано на графике
,
или графическим
построением, как показано на графике
ω-ψ(рис.3), для этого найдем в масштабе максимальную приведенную скорость конца колебателя:
![]() мм
мм
где: ω = π*n/30 = 3,14*125/30 = 13,1 1/с
На
лучах А-1, А-2 и т.д. графика V-
(рис. 10а) откладываем от дуги приведенные
скорости
![]() и
т.д., и соединив
концы их плавной кривой, получим график
и
т.д., и соединив
концы их плавной кривой, получим график
V-. На концах приведенных скоростей во всех положениях колебателя строим угол давления α = 40° (см. рис. 10а) и определяем в масштабе , минимальный радиус кулачка. = 0,0-
При построении графика V-S на участке, где вращение колебателя совпадает с вращением кулачка положительные значения приведенных скоростей откладывается по колебателю к центру его вращения, а при разных направлениях угловых скоростей кулачка и колебателя на продолжении колебателя.
4. Построение профиля кулачка.
В
масштабе из центра
строим
две окружности: минимального радиуса
и радиусом А (расстояние между осями
вращения кулачка и колебателя определяется
из графика). От точки А на окружности
радиуса А в противоположную сторону
угловой скорости кулачка откладываем
рабочий угол кулачка и делим его на
столько же равных частей
![]() и т.д., как разделен график ψ-t.
Из точки А (рис.106) радиусом равным длине
колебателя в масштабе
от окружности минимального радиуса
строим дугу
и т.д., как разделен график ψ-t.
Из точки А (рис.106) радиусом равным длине
колебателя в масштабе
от окружности минимального радиуса
строим дугу
![]() угла размаха колебателя, перенося
разметку положений конца колебателя
0, 1, 2, 3, и т.д. из (рис. 10а). Из центра через
точки 0, 1,2, 3, 4, 5, 6 на дуге колебателя
радиусами 0-1, 0-2 и. т.д. проводим
концентрический окружности, а из точек
и т.д, на этих окружностях длиной
колебателя в масштабе делаем засечки
и получаем точки 0, 1,2, 3, 4, 5, 6. Соединив
точки плавной кривой, получаем центровой
профиль кулачка. Выбрав радиус ролика,
и сделав обкатку вовнутрь, получим
действительный профиль кулачка.
угла размаха колебателя, перенося
разметку положений конца колебателя
0, 1, 2, 3, и т.д. из (рис. 10а). Из центра через
точки 0, 1,2, 3, 4, 5, 6 на дуге колебателя
радиусами 0-1, 0-2 и. т.д. проводим
концентрический окружности, а из точек
и т.д, на этих окружностях длиной
колебателя в масштабе делаем засечки
и получаем точки 0, 1,2, 3, 4, 5, 6. Соединив
точки плавной кривой, получаем центровой
профиль кулачка. Выбрав радиус ролика,
и сделав обкатку вовнутрь, получим
действительный профиль кулачка.