

Цель работы.
Изучение и ознакомление с компьютеризированной интегрированной производственной системой, средствами автоматизации и их составными частями в условиях лаборатории кафедры.
Теоретическая часть.
Общие положения
КИПС - компьютеризированная интегрированная производственная система, выполненная в лабораторном исполнении.
Назначение: предназначена для изучения средств автоматизации производственных процессов в условиях, приближенным к производственным.
Система управления. СУ является объединяющей многоуровневой иерархической системой, на верхнем уровне (I уровень) находится центральный персональный компьютер; управляющий различными системами Нго уровня. На 1Пем уровне находится самостоятельное оборудование. Связь между I, II и III уровнями двухсторонняя.

В состав КИПС входят:
Автоматизированный склад состоящий из:
двухрядной системы ячеек с кассетами из палет;
робота - штабелера;
станциями загрузки-разгрузки кассет с полетами.
Робокар (автоматизированная тележка).
Автоматическая линия состоящая из:
позициями загрузки-разгрузки с роботами;
технологическими позициями с роботами;
транспортной системой со спутниками.
Система управления КИПСом.
Каждая отдельное оборудование имеет свои самостоятельные системы управления и средства автоматизации.
Описание устройства склада
Рис.2.
Блок-схема состава склада
Основные функции склада - накопление, хранение и выдача кассет с паллетами в определенный момент времени. На складе могут хранится как заготовки так и готовые детали.
Автоматизированный склад (Рис.З) представляет собой двухрядную систему ячеек (5), расположенных в четыре уровня. Конструкция склада выполнена в виде отдельных уголков(2), стяжек (4), направляющих (1), соединенных в единое целое, в образовавшиеся ячейки устанавливаются кассеты с полетами (3).
В кассеты устанавливаются паллеты (Рис.4). Каждая кассета (1) проектируется, исходя из размеров паллеты (2) и удобства съема детали с паллеты с помощью робота, а также с учетом того, что деталь не должна выпасть при транспортировке. Паллеты (Рис.5) проектируется, исходя из габаритов детали. Кассета выполняет функции накопления и хранения деталей или заготовок.
К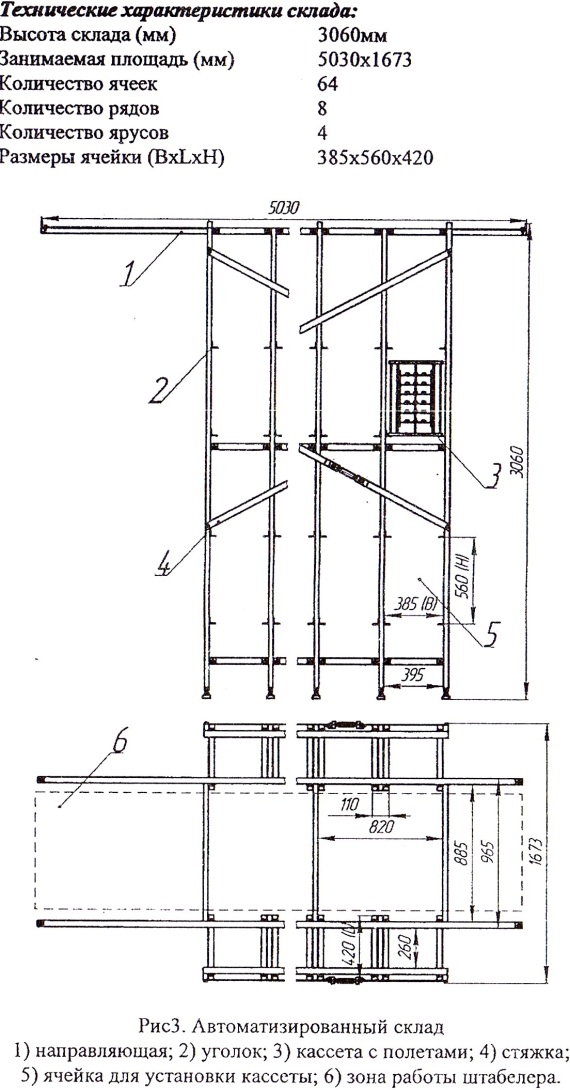
 ассеты
забираются из ячеек в соответствии с
программой в автоматическом режиме
роботом -штабелером. Кассеты с готовыми
деталями устанавливаются в свободные
ячейки, место запоминается в памяти СУ
и при необходимости по соответствующему
сигналу могут быть извлечены со склада.
ассеты
забираются из ячеек в соответствии с
программой в автоматическом режиме
роботом -штабелером. Кассеты с готовыми
деталями устанавливаются в свободные
ячейки, место запоминается в памяти СУ
и при необходимости по соответствующему
сигналу могут быть извлечены со склада.
Описание работы робота- штабелера.
Робот штабиллер
представляет собой колонну, прикрепленную
к основанию робота. На колонне находится
консоль с рабочим столом. Робот штабелер
движется по монорельсу в коридоре вдоль
склада с помощью цепного механизма.
Звездочка, вращаясь от привода
горизонтального движения, входит в
зацепление с цепью, при этом^ робот
выполняет продольное движение. Для
предотвращения опрокидывания робота^
в верхней части склада сделан швеллер.
У робота в верхней части колонны сделаны
р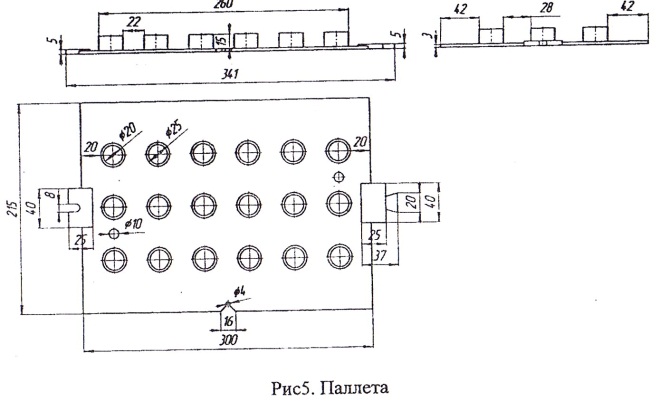 олики,
они соответственно двигаются по швеллеру.
Консоль робота имеет вертикальное
перемещение с помощью цепного механизма
и привода вертикальных подач. Грузозахватный
механизм на консоли с помощью винта
выполняет поперечное движение. Рабочий
орган использует 3 положения: крайнее
правое, крайнее левое и середину. На
грузозахватном механизме стоят
бесконтактные датчики. На вертикальном
и продольном движении для ограничения
стоят к
олики,
они соответственно двигаются по швеллеру.
Консоль робота имеет вертикальное
перемещение с помощью цепного механизма
и привода вертикальных подач. Грузозахватный
механизм на консоли с помощью винта
выполняет поперечное движение. Рабочий
орган использует 3 положения: крайнее
правое, крайнее левое и середину. На
грузозахватном механизме стоят
бесконтактные датчики. На вертикальном
и продольном движении для ограничения
стоят к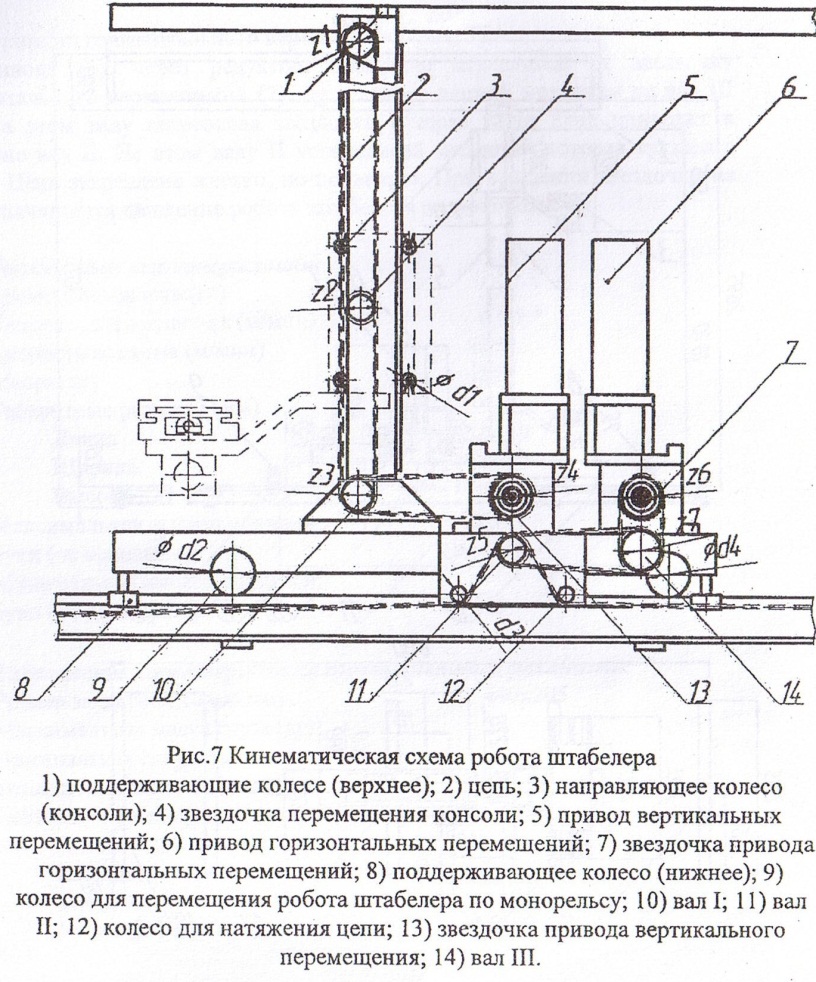 онцевые
выключатели.
онцевые
выключатели.
К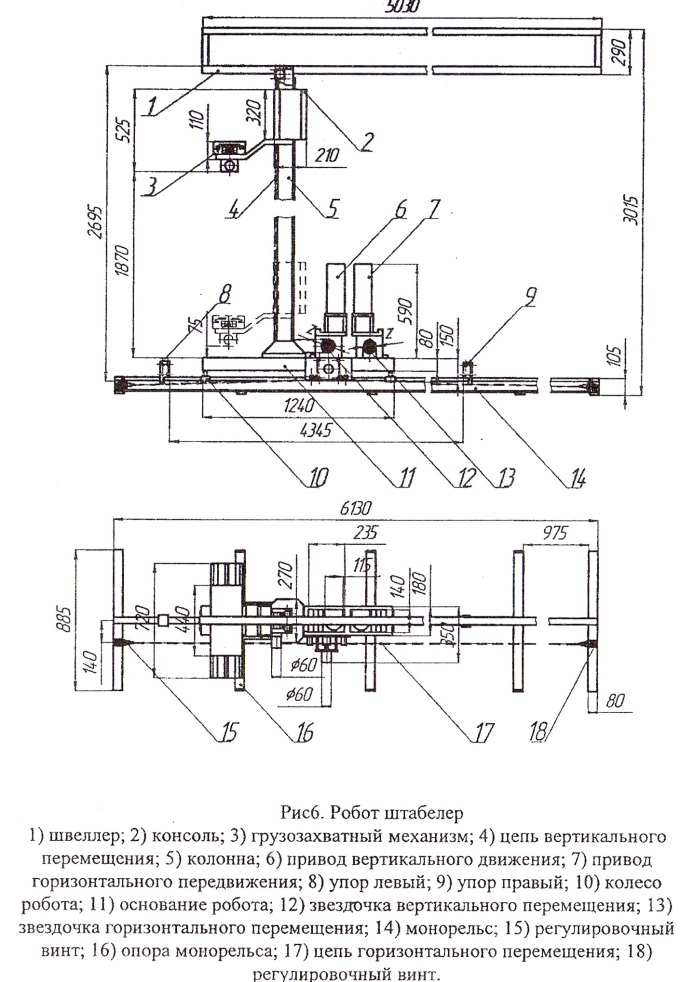 ассеты
с заготовками с готовыми деталями
помещаются на разные стороны склада.
Информация о пустых и заполненных
ячейках заносится в компьютер й при
начале рабочей смены^робот идет в нужную
нам позицию.
ассеты
с заготовками с готовыми деталями
помещаются на разные стороны склада.
Информация о пустых и заполненных
ячейках заносится в компьютер й при
начале рабочей смены^робот идет в нужную
нам позицию.
В функции робота штабелера входят перемещение кассеты с заготовками (деталями) со склада и обратно, на станции загрузки-разгрузки.
Принцип вертикального перемещения (рис. 7):
От привода (5)^ через редуктор^ вращение передается на звездочку вертикальных перемещений (13). Далее через цепной механизм на вал I (10). На этом валу закреплена звездочка ( которая через цепь (2) приводит в движение звездочку перемещения консоли (4). Таким образом консоль начинает двигаться, по направляющим колесам (З^вдоль колонны.
Принцип горизонтального перемещения (рис. 7):
От привода (6), через редуктор, вращение передается на звездочку горизонтального перемещений (7). Далее через цепной механизм на вал Ш (14). На этом валу закреплена звездочка которая через цепь приводит в движение вал П. На этом валу П установлена звездочка^ которая связана с цепью. Цепь закреплена жестко, не-подвижно. При вращении звездочки на валу II начинается движение робота штабелера по монорельсу.