

Лабораторная работа № 3
КОНТРОЛЛЕРНАЯ СХЕМА УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОМ ШПИЛЯ (на постоянном токе)
Цель работы
Ознакомиться с назначением, конструкцией шпиля.
Изучить контроллерную схему управления электроприводом шпиля.
Приобрести практические навыки управления электроприводом шпиля.
Теоретический раздел
Особенности конструкции электропривода шпиля.
В зависимости от конструкции механической части якорно-швартовные устройства подразделяют на брашпили и шпили. Недостаток брашпилей заключается в их уязвимости и трудности обслуживания, т.к. весть механизм и проводной электродвигатель установлены на открытой палубе.
В ряде случаев целесообразно всю конструкцию электропривода ЯШУ сделать более компактной, а в некоторых случаях основную часть расположить под палубой, оставив над палубой только якорную звездочку и барабан. В этих случаях применяют якорно-швартовные и швартовные шпили. Якорно-швартовные шпили предназначены для отдачи и подъема якоря при постановке или съема судна с якоря, для обеспечения надежной стоянки судна на якоре и для выполнения швартовных операций. Шпили (в отличие от брашпилей) имеют вертикальную ось якорной звездочки и швартовного барабана(рис.1).

Рис.1 – Швартовный шпиль
Вся конструкция электропривода шпиля располагается под палубой, а над палубой располагается якорная звездочка и швартовный барабан. Упрощённая кинематическая схема шпиля приведена на рис 2, где расположенный под палубой электродвигатель1 снабжен электромагнитным колодочным тормозом 6; контроллер управления также расположен под палубой, а рукоятка управления выведена на палубу.
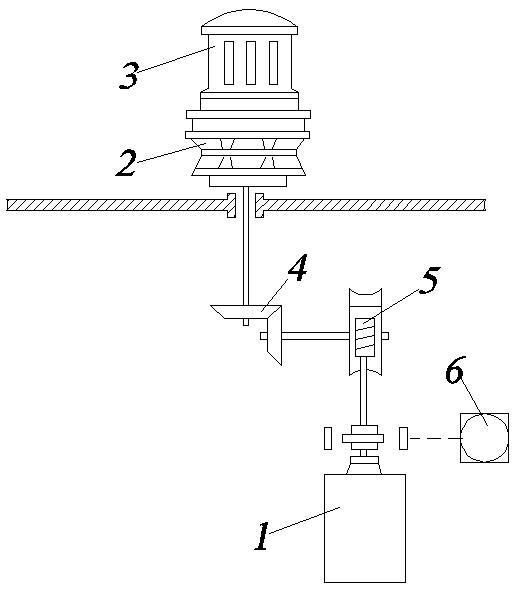
Рис.2 – Кинематическая схема шпиля
Вращение от двигателя по валу передается на червячный редуктор 5 и следом на зубчатую передачу изменения угла вращения 4, при вертикальном вращении вала якорная цепь наматывается на якорную звездочку 2, а для швартовных канатов предусмотрен швартовный барабан 3.
Контроллерная схема управления.
В качестве управляющего устройства электроприводом шпиля в лаборатории представлен силовой кулачковый контроллер постоянного тока.
Контроллером называется многоконтактный коммутационный аппарат, который имеет ряд коммутационных положений и позволяет производить ряд переключений в цепи двигателя. По роду тока контроллеры можно разделить на контроллеры постоянного и переменного тока. Переключение в цепи двигателя достигается при помощи контактов контроллера, которые управляются посредством рукоятки маховика, связанной с основным валом данного электрического аппарата. Если контакты контроллера включаются непосредственно в силовую цепь, то такие контроллеры называются силовые, а если контакты контроллера включены во вспомогательные цепи питания катушек электромагнитных аппаратов, то такие контроллеры получили название командоконтроллеры.
С рукояткой маховика контроллера механически связан вал, на котором смонтированы кулачковые шайбы. Против каждой шайбы на изоляционной панели укреплены контактные устройства. Кулачковые шайбы при вращении вала соприкасаются торцами с роликом рычага. При попадании на ролик выступа шайбы рычаг отводит подвижный контакт от неподвижного, а при попадании ролика в выемку кулачковой шайбы рычаг под действием пружины замыкает контакты. Происходит перекатывание контактов. Угол поворота вала фиксируется в определенных положениях и этим обеспечивается необходимая последовательность замыкания и размыкания контактов. С контактами контроллера через электрические перемычки и кабели соединяется главная цепь электродвигателя.
Каждое фиксированное положение маховика определяет режим работы электропривода (пуск, первая скорость, вторая скорость, торможение и.т.д.). Силовые контакты контроллера должны быть достаточно мощными и обеспечивать гашение электрической дуги. В рассматриваемом контактном устройстве постоянного тока предусмотрено дугогасительное устройство в асбестоцементной камере. В корпус силового кулачкового контроллера также монтируются коммутационные и защитные элементы (контактор включения питания (линейный контактор) и реле защиты.
Управление электродвигателем постоянного тока.
Управление электродвигателями постоянного тока включает комплекс операций: пуск и остановку, регулирование частоты вращения, реверс и торможение. Все эти операции могут выполняться с помощью ручных и автоматических аппаратов.
Пусковой ток в ДПТ достигает 10-20 кратного значения. Поэтому пуск электродвигателей осуществляется с помощью пускового реостата. При этом сила пускового тока определяется по формуле:

где
 - сопротивление пускового реостата,
которое подбирается так, чтобы сила
пускового тока не превышала значений
- сопротивление пускового реостата,
которое подбирается так, чтобы сила
пускового тока не превышала значений

Пуск электродвигателей
производят при максимальном магнитном
потоке, что обеспечивает успешный разгон
двигателя, т.к.
 Для этого сопротивление реостата в цепи
возбуждения полностью выводят.
Для этого сопротивление реостата в цепи
возбуждения полностью выводят.
При включении электродвигателя в сеть его якорь начинает вращаться, постепенно увеличивая частоту вращения, в результате чего возрастает противо-ЭДС (Е). Сопротивление пускового реостата ступенчато выводят и в конце пуска совершенно выключают из цепи якоря. При этом противо-ЭДС достигает значения, близкого к напряжению сети, а сила тока уменьшается до номинальной. Поскольку пусковой реостат имеет несколько ступеней, то и изменение пусковой силы тока происходит ступенями. Соответственно ступеням тока будет изменяться вращающий момент двигателя, а значит и частота (скорость) вращения двигателя, достигая в конце пуска своего установившегося значения.
Для динамического торможения электродвигателя отключают схему от источника питания, и цепь якоря оказывается соединена на параллельно включенное разрядное сопротивление, обеспечивая быструю отдачу накопленной кинетической энергии вращения и тем самым остановку двигателя.
Угловая частота вращения электродвигателя равна:

Частоту вращения можно регулировать путем изменения напряжения источника питания U; изменением сопротивления в цепи якоря Rя или изменением магнитного потока Ф.
Рассмотрим способ регулирования электродвигателя параллельного возбуждения-пускорегулировочным реостатом, включенным последовательно в цепь якоря (т.е изменением сопротивления в цепи якоря).
В начальный момент
пуска через цепь обмотки возбуждения
и цепь якоря двигателя, ограниченную
пусковым сопротивлением, начинает
протекать ток
 ,
где
,
где
 .
По мере увеличения оборотов, увеличивается
противо-ЭДС (Е) в обмотке якоря двигателя,
постепенно уменьшая ток в цепи якоря,
а напряжение растет. При достижении
напряжения определенного значения
шунтируется первая ступень пускового
реостата. Вследствие уменьшения
сопротивления цепи, ток якоря возрастает,
двигатель при этом продолжает увеличивать
скорость вращения и наводимая в якоре
ЭДС уменьшает ток в цепи якоря. Затем
последовательно выводятся все ступени
пускового сопротивления, до достижения
тока и скорости вращения номинального
значения. Реостат в цепи обмотки якоря
позволяет регулировать частоту вращения
в сторону понижения
от номинальной.
.
По мере увеличения оборотов, увеличивается
противо-ЭДС (Е) в обмотке якоря двигателя,
постепенно уменьшая ток в цепи якоря,
а напряжение растет. При достижении
напряжения определенного значения
шунтируется первая ступень пускового
реостата. Вследствие уменьшения
сопротивления цепи, ток якоря возрастает,
двигатель при этом продолжает увеличивать
скорость вращения и наводимая в якоре
ЭДС уменьшает ток в цепи якоря. Затем
последовательно выводятся все ступени
пускового сопротивления, до достижения
тока и скорости вращения номинального
значения. Реостат в цепи обмотки якоря
позволяет регулировать частоту вращения
в сторону понижения
от номинальной.
Более распространенный
способ регулирования угловой скорости
вращения электродвигателей параллельного
возбуждения изменением
магнитного потока.
Это осуществляется, включая регулировочный
резистор
 в цепь обмотки возбуждения. Это приводит
к уменьшению тока возбуждения, а значит
и к уменьшению магнитного потока, который
взаимодействуя с обмоткой якоря, вызывает
такую же малую противо-ЭДС. В результате
угловая скорость якоря ω увеличивается,
т.к.
.
Даже небольшое уменьшение потока
приводит к значительному возрастанию
тока
Регулирование этим способом возможно
только повышением
от номинальной угловой скорости.
в цепь обмотки возбуждения. Это приводит
к уменьшению тока возбуждения, а значит
и к уменьшению магнитного потока, который
взаимодействуя с обмоткой якоря, вызывает
такую же малую противо-ЭДС. В результате
угловая скорость якоря ω увеличивается,
т.к.
.
Даже небольшое уменьшение потока
приводит к значительному возрастанию
тока
Регулирование этим способом возможно
только повышением
от номинальной угловой скорости.
Ток в обмотке возбуждения меньше тока в цепи якоря в 20 раз, и обмотку возбуждения делают из большого числа витков малого сечения. Обязательно предусматривается разрядный резистор, включенный параллельно обмотке возбуждения, предохраняя ее от перегорания в случае короткого замыкания в цепи.
Реверс двигателя можно осуществить
изменением направления тока в обмотке возбуждения при неизменном направлении тока в якоре;
изменением направления тока в якоре при неизменном направлении тока в обмотке возбуждения;
Торможение эл.двигателей может быть:
механическое с помощью колодочных или дисковых тормозов;
реостатное, когда якорь вращающейся машины отключается от сети и замыкается на реостат определенного сопротивления;
рекуперативное с отдачей энергии в сеть, осуществляемое переводом машины в режим генератора;
противовключением, выполняемое путем изменения направления тока в якоре электродвигателя, т.е. изменением полярности питания обмотки вращающегося якоря.
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЯКОРНО-ШВАРТОВНОГО ШПИЛЯ ПОСТОЯННОГО ТОКА

Диаграмма включений контактов контроллера
№ |
Травить |
|
Выбирать |
||||||||||
|
5 |
4 |
3 |
2 |
1 |
0 |
1 |
2 |
3 |
4 |
5 |
||
I |
|
|
|
|
|
X |
X |
X |
X |
X |
X |
||
II |
X |
X |
X |
X |
X |
X |
|
|
|
|
|
||
III |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
|
||
VI |
X |
X |
X |
X |
X |
|
X |
X |
X |
X |
X |
||
V |
|
|
|
|
|
|
X |
X |
X |
X |
X |
||
VI |
X |
X |
X |
X |
X |
|
|
|
|
|
|
||
VII |
X |
X |
X |
X |
X |
|
|
|
|
|
|
||
VIII |
|
|
|
|
|
|
X |
X |
X |
X |
X |
||
IX |
|
|
|
|
X |
X |
X |
|
|
|
|
||
X |
X |
X |
X |
|
|
|
|
|
X |
X |
X |
||
XI |
X |
X |
|
|
|
|
|
|
|
X |
X |
||
XII |
X |
|
|
|
|
|
|
|
|
|
X |
||
Рассмотрим типовую контроллерную схему управления электроприводом якорно-швартовного шпиля постоянного тока.
Управление якорно-шпилевым электроприводом осуществляется с помощью силового кулачкового контроллера, имеющего нулевое положение и по пять положений в направлении «Выбирать» и «Травить». Пускорегулировочное сопротивление состоит из трех ступеней. Схема обеспечивает пуск, реверс и ступенчатое регулирование скорости вращения, остановку и защиту электродвигателя от ненормальных режимов работы.
При подготовке электропривода к пуску маховичок контроллера устанавливают в нулевое положение и подают питание на схему. Контакты I II IX замкнуты. При этом получает питание параллельная обмотка возбуждения LM4 двигателя; с целью ограничения тока возбуждения при стоянке двигателя в цепь вводиться добавочное сопротивление R7, оно используется в дальнейшем для получения повышенных скоростей выбирания якоря путем ослабления магнитного потока двигателя. Включение автоматического линейного выключателя QF(АВ) осуществляется специальной съемной рукояткой, которая может быть вставлена в гнездо в нулевом положении контроллера, необходимо повернуть ее от себя против часовой стрелки до упора, при этом получит питание катушка автоматического выключателя QF(АВ) и его контакты останутся во включенном положении. Подготовлена цепь якоря электродвигателя к пуску.
Рассмотрим действие схемы при положениях контроллера «Выбирать»
При повороте маховичка контроллера в 1 положение «Выбирать» замыкаются контакты I,III,IV,V,VIII, IX шунтируется(выводится) сопротивление R7 из цепи независимой обмотки возбуждения LM 4 двигателя, при этом ток в обмотке возбуждения и магнитный поток максимальный, обеспечив большой вращающий момент двигателя в начальный период пуска. При замкнутом контакте IV подается напряжение на катушку тормозного электромагнита YB и колодки тормоза освобождают вал электродвигателя для вращения. Замкнутые контакты V и VIII (реверсивные контакты) обеспечивают протекание тока через обмотку якоря двигателя М с определенной полярностью, параллельно обмотке якоря включено сопротивление R4. Двигатель, подключенный к сети через полное пускорегулировочное сопротивление (R1 R2 R3), начинает разворачиваться, работая на минимальной «ползучей» скорости.
Во 2 положении контроллера «Выбирать», остаются замкнутыми контакты I,III,IV,V,VIII и размыкается контакт IX ,тем самым разрывая цепь сопротивления R4.В этом режиме двигатель переходит на вторую, более высокую скорость (следующую искусственную характеристику) и при тех же последовательно включенных пусковых сопротивлениях R1 R2 R3 и максимальном магнитном потоке обмотки возбуждения.
В 3,4 и 5 положениях контроллера «Выбирать» последовательно замыкаются контакты X,XI и XII пусковые сопротивления R1,R2 R3. Таким образом, двигатель работает на третьей, четвертой и пятой скоростях (увеличивается наклон искусственных характеристик).
Однако при регулировании скорости двигателя в положении 5 «Выбирать» разомкнется контакт III, вводя в цепь обмотки возбуждения полное сопротивление R7. В результате так уменьшится магнитный поток, что скорость получит дополнительное увеличение; таким образом, двигатель работает на максимальной скорости.
Работа схемы в направлении «Травить» аналогична.
Для осуществления реверса электродвигателя маховичок контроллера из положения «Выбирать» переводят в положение «Травить» (или наоборот). При этом изменятся направление тока в якоре электродвигателя при неизменном направлении тока в обмотках возбуждения, что и приведет к изменению направления момента вращения электродвигателя.
При работе в направлении «Травить» в 1 положении замыкаются реверсивные контакты VI и VII, обеспечивая прохождение тока через цепь якоря снизу вверх, при этом сопротивление R5 оказывается зашунтировано на все время работы. В этом же положении шунтируется цепь якоря сопротивлением R4 с помощью замкнутого контакта IX.
При последующих положениях 2,3,4,5 контактом IX производится размыкание в цепи шунтирующего сопротивления R4, а затем последовательно выводятся сопротивления R1 R2 R3 при замыкании контактов X,XI,XII. В последнем 5 положении не производится ослабление магнитного потока, т.к. контакт III остается замкнутым. Следовательно, 5 скорость в положении «Травить» оказывается несколько меньше, чем в положении «Выбирать».
Для остановки электродвигателя необходимо установить маховичок контроллера в нулевое положение. При этом разомкнутся контакты контроллера V-VIII и VI - VII в реверсивном контуре, и замкнется контакт IX, подключающий параллельно якорю электродвигателя тормозное сопротивление R4 , в результате чего электродвигатель переходит в режим динамического торможения. В тоже время лишается питания катушка тормозного электромагнита YB и колодки тормоза затормаживают электродвигатель.
Защиты электропривода якорно-шпилевого устройства постоянного тока, предусмотренные схемой.
Защищают электродвигатель от перегрузок с помощью максимального реле КА. При возрастании тока в цепи якоря электродвигателя выше 2,5 кратного значения от номинального реле срабатывает и размыкает свой нормально замкнутый контакт в цепи удерживающей катушки линейного автоматического выключателя QF. Последний с помощью своих контактов отключает двигатель от сети.
Минимальная защита осуществляется за счет срабатывания на отключение удерживающей катушки автоматического выключателя QF , который отключает двигатель от сети, а именно, при снижении напряжения ниже допустимого уменьшается удерживающая сила катушки, которая удерживает защелку автомата, защелка высвобождает пружину и происходит размыкание контактов автомата QF.
Защита от токов к.з. цепей управления осуществляется предохранителями FU1 FU2. Защита электродвигателя от токов короткого замыкания осуществляется автоматическим выключателем на отсечном распределительном щите (на схеме электропривода, как правило, не показывают).
Сопротивление R8 защищает параллельную обмотку возбуждения двигателя при снятии питания (сопротивление разрядное).
Конечные выключатели SQ1 SQ2 служат для ограничения хода механизма и размыкая свои контакты I II отключают двигатель от сети.
Состав основных электрических аппаратов, предусмотренных схемой.
М – двигатель постоянного тока;
LM1,LM2 – компенсационная обмотка и обмотка дополнительных полюсов;
LM3 – сериесная обмотка;
LM4 – параллельная обмотка возбуждения;
YB – тормозной электромагнит;
SQ1, SQ2 – конечники путевых конечных выключателей;
R1,R2,R3 – пуско-регулировочные сопротивления;
R4 – шунтирующее тормозное сопротивление;
R7 – добавочное регулировочное сопротивление;
R8 – разрядный резистор;
QF – автоматический линейный выключатель;
КА – максимально токовое реле;
FU1; FU2 – предохранители.