

Система автоматического регулирования скорости арс цнии
Чтобы решить задачи интервального и прицельного регулирования скоростей скатывания в системе АРС ЦНИИ, необходимо определять весовую категорию, длину отцепа и его пробег; измерять ускорение движения отцепа (ходовые свойства) и сопротивление его движению на кривых участках пути; учитывать внешние факторы, обусловленные средой; вычислять скорости выхода отцепов из ТП и на этой основе осуществлять автоматическое управление замедлителем.
Для автоматического регулирования скорости скатывания отцепов предусматриваются три ТП: I (верхняя), II(пучковая), III (парковая), устанавливаемые на подгорочных путях (рис. 4.24)
Позиция I обеспечивает поддержание интервалов между отцепами на разделительных стрелках между 1ТП и II ТП, а также непосредственно на самой II ТП (интервальное регулирование). II ТП реализует интервально-прицельное регулирование скоростей скатывания отцепов. Парковая ТП осуществляет необходимую дальность пробега до стоящих на путях вагонов и соударение со скоростью не более 1,5 м/с (прицельное торможение).
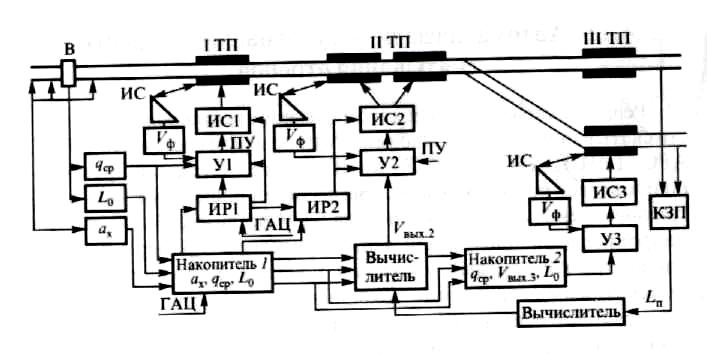
Рис. 4.24. Схема АРС ЦНИИ
Расчет скорости выхода отцепов из верхней ТП и выбор ступени торможения основаны на использовании среднего значения весовой категории отцепа gср и его длины L0, определяемых при помощи весомера В, конструкция и принцип действия которого выделяют пять весовых категорий gср: легкую (Л), среднелегкую (СЛ), среднюю (С), среднетяжелую (СТ), тяжелую (Т). Значение L0 формируется путем подсчета осей отцепа.
Чтобы обеспечить прицельное регулирование, важным измеряемым параметром является значение ускорения ах движения отцепов (ходовых свойств), которое вычисляется с помощью трех педалей на измерительном участке в момент прохождения отцепа. Измерение сопротивления движению отцепов на кривых участках пути между 1ТП и II ТП выполняется также с помощью педалей на основе данных о разности квадратов скоростей движения. Результат измерения используется при расчете скорости выхода отцепов со II ТП (VВЫХ.2) Необходимая длина пробега отцепа требует вычисления свободной части подгорочного пути Lп, начиная от паркового замедлителя. Эта величина определяется путевыми датчиками контроля заполнения путей (КЗП).
Информация
о gср
поступает в устройство управления
верхней ТП
(У1), которое задает скорость выхода V
вых1.
В
У1 сравнивается за

 данная
данная
Vвых.1 и фактическая скорость Vф. После этого осуществляется соответствующее воздействие на исполнительный блок (ИС1). Когда Vф =Vвых.1, замедлитель с учетом необходимого опережения растормаживается, выпуская отцеп с заданной скоростью. Предусмотрена возможность управления замедлителями с пульта управления (ПУ).
Выявление интервалов между отцепами, определение стрелок разделения и скоростей выхода из ТП, исходя из условий интервального регулирования, осуществляется блоками интервального регулирования в зоне 1ТП — ИР1 и ИР2 — в зоне пучковой ТП. Блок ИР1 связан с блоками ГАЦ ЦНИИ и соответствующими рельсовыми цепями. Команда на обеспечение интервального регулирования в зоне 1ТП и IIТП поступает соответственно в блоки управления У1 и У2.
С вычислителя ускорения данные об ах, а также gср и Lo попадают в накопитель 1 и транслируются по маршрутам следования отцепов. Скорости выхода отцепов с IIТП и ШТП определяются вычислителем на основании данных qcp , aх, L0 и LП. Предусмотрено девять градаций скоростей выхода с II ТП и пятнадцать — с IIIТП.
Вычисленное значение УВЬ1Х.3 поступает в свою очередь в накопитель 2 и блок УЗ, где сравнивается с фактической скоростью, измеренной скоростемером СК. Характер работы тормозных позиций в маршруте в системе АРС ЦНИИ отображен на рис. 4.25.
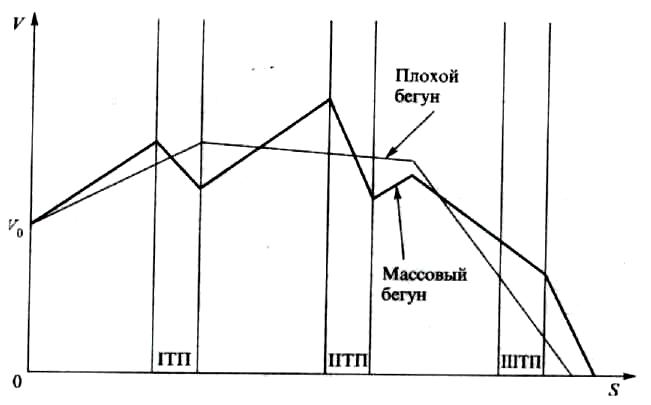
Рис. 4.25 Траектории движения отцепов в системе АРС ЦНИИ