

Вычисление скорости выхода отцепа из тп
По аналогии (4.4) скорость выхода i+1 отцепа вычисляется:
Vвыхi+1 =√ V2конi+1 +2a i+1 Lпр , (4.6)
где a i +1 <0.
Вопрос возникает в корректности решения уравнения 4.6, где присутствует величина ускорения i+1 отцепа, который еще не проехал участок пути до координаты прицеливания. Однако всегда можно принять, что ускорение движения i-го и i+1 отцепов отличаются некоторым коэффициентом k, т.е. a i+1 = kа1.
Тогда выражение (4.6) становится вполне корректным:
Vвыхi+1 =√ V2конi+1 +2k a iLпр. (4.7)
Величина коэффициента k отражает различие в динамике движения следующих друг за другом двух отцепов.
Коэффициент k, определяется на том основании, что в соответствии со вторым законом Ньютона, если внешние силы F, действующие на вагоны, одинаковы, то:
т i a i = т i+1 a i+1.
Отсюда
тI / тi+1 = ai+1/ai = k (4.8)
Очевидно, что различие в динамике движения может быть определено по относительному соотношению масс движущихся отцепов либо по отношению их ускорений движения в одинаковых условиях. В первом случае коэффициент k определяется на измерительном участке, где определяется весовая категория отцепов. При этом условия движения отцепов должны быть одинаковыми.
Таковым может быть выбрано торможение отцепа замедлителем при одном и том же начальном тормозящем усилии (ступени торможения). Более подробно об этом алгоритме будет сказано ниже, при рассмотрении этапа управления торможением.
Уместно напомнить, что вычисление коэффициента k по отношению масс требует измерения веса вагонов с той же погрешностью, с которой допускается прицельное торможение. Так к примеру, если погрешность скорости соударения допускается ±10 %, то ориентировочно и массы вагонов должны определяться с небольшой погрешностью. Эксплуатируемые весомеры пружинного действия, позволяющие оценивать лишь весовую категорию отцепов для реализации прицельного торможения, мало пригодны.
Различие в динамике движения вагонов для исключения множества влияющих факторов целесообразно определять непосредственно на участках, где производится прицельное торможение.
Алгоритмы прицельного торможения, как известно, предполагают определение координат точки прицеливания, которые вычисляются в виде прогнозных величин Lx. Такие алгоритмы базируются на фильтрации параметров движения отцепа по сортировочному пути с целью определения относительных различий в динамике движения двух следующих друг за другом отцепов. Базовым уравнением, реализованным в системах УУПТ, является следующее:
Vвых. расч.i =√ V2кон +2kaсп. i-1L0х i-1,
где L0х i-1 – прогнозируемая координата прицеливания очередного i-го отцепа.
Управление торможением отцепов в замедлителях
На рис. 4.19 показаны различные траектории движения отцепов как в режиме торможения на ТП, так и после нее в режиме свободного скатывания.
На ТП происходит быстрое импульсное воздействие тормозящей силы на отцеп, в результате чего резко изменяется динамика его движения вследствие действия инерционных сил. Последствия такого торможения трудно предсказуемы до момента перехода отцепа в режим динамически установившегося движения свободного скатывания и существенно снижают точность прогнозирования движения. Так, кривая 1 характеризует движение отцепа с расчетной скоростью Vвых.р без торможения на ТП в режиме установившегося движения, хорошо описываемого



 2
2
 Vвх
Vвх
 3
3

 4
4
 Vвых.р
Vвых.р





 1
3
2
1
3
2

 1,4
1,4
 Vкон
i
Vкон
i

А Lx1 Lx2
Рис. 4.19. Траектории движения отцепов
уравнением 4.7. Кривые 2, 3, 4 характеризуют разные режимы торможения и, как следствие, различные траектории движения вагонов после торможения. Следует обратить внимание на тот факт, что. в момент оттормаживания замедлителя во всех случаях обеспечивалась одна и та же выходная скорость для одного и того же вагона. Различные траектории движения отцепов после торможения вызваны последствиями действия инерционных сил, о которых было сказано ранее.
Для уменьшения влияния инерционных сил, управление торможением отцепов в замедлителях должно быть плавным (мягким), обеспечивающим плавное сопряжение кривых (см. рис. 4.19) в момент оттормаживания. Это обеспечивается при условии равенства величин ускорения в момент оттормаживания отцепа и ускорения свободного скатывания его по участку пути (сортировочному пути). Таким образом, критериями прицельного торможения являются два параметра, определяющие динамику движения отцепов: скорость выхода Увых и ускорение в момент растормаживания (а = ясв), равное ускорению свободного скатывания отцепа.
На рис. 4.20 показана траектория изменения скорости отцепа, поясняющая реализацию плавного режима торможения (ПРТ). Алгоритм, реализующий его, состоит в следующем.
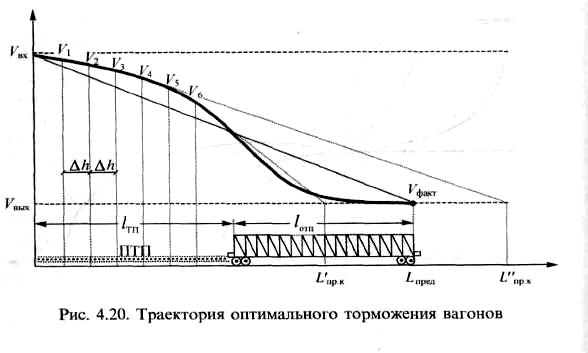
Отцеп въезжает на заторможенный замедлитель, установленный на одну из низших ступеней торможения (I или II). Через равные интервалы пройденного пути ∆h (∆h≠∆l) измеряется скорость движения отцепа:V1, V2, ...

если на текущей ступени торможения окажется, что L “np к > Lnp к,
Для вычисления коэффициента ка достаточно после измерения ускорений а i = азам i и аi+1 = азамi+1 на начальной, одинаковой сту-
пени торможения, после въезда первой колесной пары отцепа на
Таким образом, реализация МРТ при заторможенном замедлителе на одной из низших ступеней торможения позволяет уточнить разницу в ходовых свойствах попутно следующих отцепов.
Алгоритм МРТ относится к категории адаптивных алгоритмов определения реальных ходовых свойств отцепов. При этом, что весьма важно, не требуется априорно определять массы отцепов. Немаловажно и то, что заторможенное состояние замедлителя на низшей ступени торможения практически исключает выдавливание отцепов тормозными балками замедлителя и уменьшает время на выполнение команды торможения, связанное с инерционностью замедлителя.
Ускорение торможения ак может быть вычислено иначе:
 где
τ — интервал измерения текущих значений
скорости, может быть принят
численно равным тотг
Тогда получим:
где
τ — интервал измерения текущих значений
скорости, может быть принят
численно равным тотг
Тогда получим:
положив Vk = Кτфакт, определяется скорость Vk-1, численно равная скорости, при которой необходимо сформировать команду оттормаживания замедлителя V0TT:
Алгоритм адаптивного управления II ТП, базирующийся на фильтрации параметров движения и статистической экстраполяции, позволяет реализовать МРТ вагонов, повышает эффективность прицельного торможения.
Рассмотренный алгоритм распространяется и на управление торможением отцепов не только на II ТП, но и на один ТП и два ТП.