

4.4.4. Прицельное торможение отцепов на базе адаптивных алгоритмов
Критериями прицельного торможения, согласно ЭТТ к системам горочной автоматизации, являются два показателя: допустимая скорость соударения отцепов в зоне автоматизации на сортировочных путях (до 450 м) не должна превышать Vсоуд≤5 км/ч и длина окон должна быть не более 3 м в расчете на один вагон.
Рассмотрим алгоритмы прицельного торможения отцепов с последней тормозной позиции, реализуемые в современных системах УУПТ, АРС. В качестве прицельной ТП может выступать либо парковая (IIТП), либо, в ее отсутствие, пучковая (IIТП).
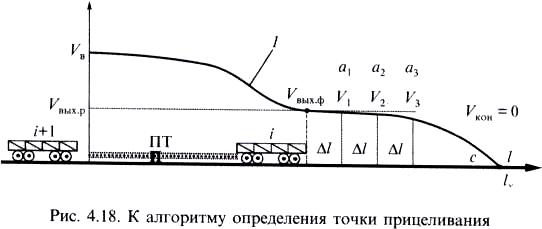
Согласно кривой, если вагон затормозить в IIТП до скорости Vвых.р, то он, подчиняясь законам движения, через какое-то время окажется в координате lx, в которой его скорость будет равна нулю, т. е. вагон остановится в соответствии с известным уравнением [5]:
Vвых =√ V2кон +2 alх , (4.4)
lх= V2вых – V2кон/ 2a, при Vкон =0.
При этом необходимо отметить, что траектория движения отцепа на участке до lх может быть хорошо (гарантированно) прогнозируемой только при обеспечении такого режима торможения, когда его ускорение движения сравняется с ускорением свободного скатывания на этом участке. Это условие обеспечивает динамически установившийся режим движения отцепа после действия импульсных сил торможения в замедлителе.
Основополагающими положениями в реализации алгоритмов прицельного торможения служат:
определение координаты точки прицеливания lх;
вычисление требуемой (расчетной) скорости отцепа Vвых.р на выходе тормозной позиции;
реализация заданного режима торможения, обеспечивающего минимизацию последствий действия инерционных сил отцепов;
корректировка расчетной скорости выхода;
адаптивное оттормаживание замедлителей;
контроль исполненного режима управления.
Определение координаты прицеливания
В соответствии с уравнением 4.4 координата прицеливания lx определяется при условии, что известна скорость выхода отцепа из ТП – Vвых и ускорение движения отцепа на участке пути lx , т.е. если i-й отцеп выехал из ТП и его скорость зафиксирована, то дождавшись, когда он остановится на СП (Vкон = 0), определяется lx либо ускорение а, с которым он двигался на рассматриваемом участке lx.
Однако скорость выхода отцепа из ТП должна быть известна по меньшей мере, когда отцеп находится в зоне действия тормозных замедлителей, т.е. задолго до того, как он проедет по участку пути lx. Более того, чаще всего имеет место, в момент подъезда очередного i+1 отцепа, i-й находится в движении и его координата lx (координата прицеливания i+1 отцепа) неизвестна. Единственный путь решения этой задачи состоит в реализации прогнозирования координаты lx . Причем гарантированность (уверенная предсказуемость) прогнозирования при отслеживании динамики движения i-го отцепа при движении по участку lx будет тем выше, чем больше точек отсчета скорости (V1,V2, ...) через равные интервалы ∆l будут реализованы. На самом деле в пределе при отсчете скорости Vкон в точке, где эта скорость равно нулю, однозначно определяется lx. таким образом, по мере продвижения i-го отцепа после торможения в замедлителе на каждом шаге измерения реальной скорости его движения вычисляется реальное ускорение движения (а1, а2, ...) и прогнозная координата Lпр:
Lпр = Vк – Vк+1/ 2ак (4.5)
По мере продвижения отцепа накапливаются текущие значения вычисленных ускорений ак и по ним находится усредненное значение ак, так называемая оценка ускорения, значение которого в пределе должно быть равно истинному значению ускорения, с которым отцеп движется по участку lx:
аr = ак-1 + 1/к(ак - ак-1).
Аналогично, по мере продвижения отцепа по участку пути через мерные интервалы ∆l пройденного пути уточняется прогнозная координата Lпр, приближения к своему действительному значению lx.
Вычисляемые значения ускорения движения i-го отцепа отражают его реальные динамические качества, учитывающие все факторы, влияющие на удельное сопротивление движению wо, фактические условия движения, включая уклон пути и внешние климатические факторы.
При этом нет необходимости пользоваться ориентировочным экстраполированием ускорения движения отцепа, получаемого на измерительном участке.
К моменту подъезда i+1 отцепа к ТП для расчета его скорости выхода Vвых.i+1, становится известной координата прицеливания Lпр≈lx. Следует заметить, что координата lx необязательно должна соответствовать точке остановки хвоста i-го отцепа. Достаточно в качестве конечной скорости Vкон принять допустимую скорость соударения Vсоуд≤5 км/ч или меньшую, определяемую координатой, в которой i+1 отцеп нагонит i-й со скоростью, меньшей чем допустимая.
Немаловажен и тот фактор, что прицеливание и соответственно управление i+1 отцепом осуществляется по переднему – i-му. Управление как бы ведется с ориентацией на «хвост» предыдущего. При этом очевидно, что внешние воздействующие факторы, как и состояние пути движения, за столь короткий интервал попутного следования можно считать практически не меняющимися.